Pytorch输出网络中间层特征可视化
Pytorch输出网络中间层特征可视化
本文主要介绍了如何提取特定层的特征,然后对它进行可视化。最后给出了不同网络的应用案例。
推荐一个GITHUN实现可视化的工具地址
整体步骤
- 加载已经预训练好的模型
- 使用单张图片作为输入
- 针对想要查看的特征提取层记录结果
- 网络中的特征提取结果的
shape为batch_size, filter_nums, H, W, 因此要使用transpose函数对其维度进行转换 - 将
tensor转为numpy, 然后根据预处理中transform进行的操作将逆操作后得到[0,1]区间的图像 - 将得到的
filter_nums张图片拼接后输出
案例1: 自定义的模型(可修改forward)
1. 存储特征提取结果
没有听说过SiameseNetwork不重要,只需要知道如何暂存特征的结果并输出即可
最简单的做法就是在forward函数当中截取想要的结果并存储
下面给出网络的结构
class SiameseNetwork(nn.Module):
def __init__(self):
super().__init__()
self.cnn1 = nn.Sequential(
nn.ReflectionPad2d(1),
nn.Conv2d(1, 4, kernel_size=3),
nn.ReLU(inplace=True),
nn.BatchNorm2d(4),
nn.ReflectionPad2d(1),
nn.Conv2d(4, 8, kernel_size=3),
nn.ReLU(inplace=True),
nn.BatchNorm2d(8),
nn.ReflectionPad2d(1),
nn.Conv2d(8, 8, kernel_size=3),
nn.ReLU(inplace=True),
nn.BatchNorm2d(8),
)
self.fc1 = nn.Sequential(
nn.Linear(8 * 100 * 100, 500),
nn.ReLU(inplace=True),
nn.Linear(500, 500),
nn.ReLU(inplace=True),
nn.Linear(500, 5))
self.fc2 = torch.nn.Linear(5, 1)
def forward_once(self, x, type=1):
output = self.cnn1(x)
if type == 1:
self.featuremap1 = output
else:
self.featuremap2 = output
output = output.view(output.size()[0], -1)
output = self.fc1(output)
return output
def forward(self, input1, input2):
output1 = self.forward_once(input1, 1)
output2 = self.forward_once(input2, 2)
x = torch.abs(output1 - output2)
x = self.fc2(x)
return x
我们需要可视化的通常是卷积之后的结果, 也就是CNN层的输出, 因此这里将self.cnn1(x)的结果存储到了self.featuremap当中
核心代码如下, 其中的type 是什么不重要,与该网络的应用有关。
if type == 1:
self.featuremap1 = output
else:
self.featuremap2 = output
2. 加载模型,输入单组图片
SiameseNetwork的输入需要有两张图片, 这里我将其封装为一个函数
其中关键的代码都已经给出了注释
net = SiameseNetwork() # 定义模型
net.load_state_dict(torch.load(f'net30.pth')) # 加载与训练好的模型
transform_test = transforms.Compose([transforms.Resize((100, 100)),
transforms.ToTensor()]) # 定义预处理操作
def test_one(path1, path2):
'''单对图片测试'''
img1 = Image.open(path1).convert('L')
img2 = Image.open(path2).convert('L')
img_tensor1 = transform_test(img1)
img_tensor2 = transform_test(img2)
img_tensor1.unsqueeze_(0) # 给tensor添加一个维度,模拟为batch=1
img_tensor2.unsqueeze_(0)
output = net(img_tensor1, img_tensor2) # 单组图片进入网络得到结果
feature_output1 = net.featuremap1.transpose(1, 0).cpu()
feature_output2 = net.featuremap2.transpose(1, 0).cpu()
feature_out1 = torchvision.utils.make_grid(feature_output1)
feature_out2 = torchvision.utils.make_grid(feature_output2)
feature_imshow(feature_out1, 'feature_out1')
feature_imshow(feature_out2, 'feature_out2')
# euclidean_distance = F.pairwise_distance(output1, output2)
euclidean_distance = torch.sigmoid(output)
concatenated = torch.cat((img_tensor1, img_tensor2), 0)
imshow(torchvision.utils.make_grid(concatenated), 'Similarity: {:.2f}'.format(euclidean_distance.item()))
下面对提取特征的函数给出具体介绍,使用net.featuremap1操作来获取特征, 这里的featuremap1 也对应了我之前存储时候的self.featuremap1
transpose(1, 0).cpu() 是因为此时的特征为torch.Size([1, 8, 100, 100]) , 也就是(batch_size, filter_nums, H, W) 转换后才能方便输出
feature_output1 = net.featuremap1.transpose(1, 0).cpu()
feature_output2 = net.featuremap2.transpose(1, 0).cpu()
下面的代码是将若干幅图像拼成一幅图像, 在本文中feature_output有8张图片, 具体可以去百度搜torchvision.utils.make_grid功能
feature_out1 = torchvision.utils.make_grid(feature_output1)
feature_out2 = torchvision.utils.make_grid(feature_output2)
最重要的可视化函数是feature_imshow
首先读入inp, 转换为plt期望的格式
因为本文使用的transform没有针对mean和std进行处理, 传入的图像默认是在(0,1)之间的,所以这里不用进行逆操作,后文的其他案例会给出这种情况的解决办法。
np.clip(inp, 0, 1) 将小于0的像素都变为0,大于1的像素都变为1
不然会产生如下报错信息
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
剩下 的就是简单的plt展示了,也没什么好解释的。
def feature_imshow(inp, title=None):
"""Imshow for Tensor."""
inp = inp.detach().numpy().transpose((1, 2, 0)) # 将通道数放在最后一维
inp = np.clip(inp, 0, 1)
plt.imshow(inp)
if title is not None:
plt.title(title)
plt.pause(0.001) # pause a bit so that plots are updated
3. 中间层特征结果
这里做的是汉字的比对,输入图片, 下图是经过特征提取之后的结果,清晰的学习到了汉字的特征。


案例2: torchvision.models中的预训练模型
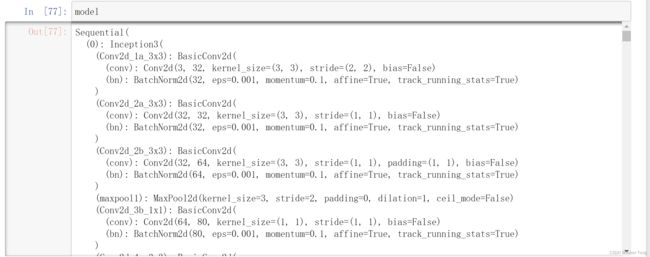
详细的流程已经在上面讲了, 这里就给出此类pretrain过的模型应该如果输出中间结果的思路, 以inceptionV3为例
1.加载模型
这种模型可以直接从models自带的类中下载
model = models.inception_v3(pretrained=True, aux_logits=False)
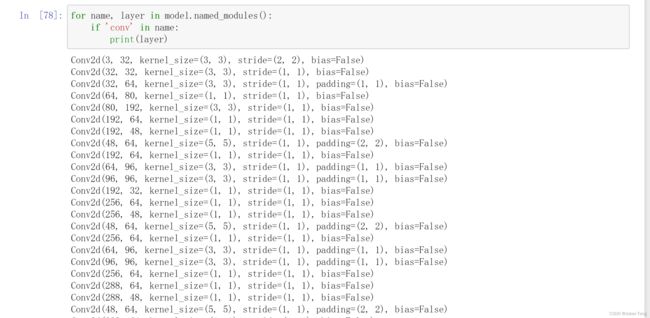
2. 便利模型
可以采用下面代码的方式来便利网络, 不过这种方式通常在forwad中进行
for name, layer in model.named_modules():
if 'conv' in name:
print(layer)
拓展: 通过下面这种简单的方式就可以将卷积层的结构都保存下来
out_put = []
for name, layer in model.named_modules():
x = layer(x)
if 'conv' in name:
out_put.append(layer(x))
for name, layer in model.named_modules():
if name == '0':
feature_layer = nn.Sequential(*list(layer.children())[:2])
print(feature_layer)
这里通过*list(layer.children())[:2]来对网络解包,选取想要的部分

因为这里是网络的第一层,因此可以直接拿来使用, 如果你想要网络的后面某层中的卷积操作,需要保证前面的过程也完整的进行下来。
3. 可视化中间特征
因为本案例中的transforms我才去了自定义mean和std来进行Normalize
tf = transforms.Compose([
transforms.Resize(299),
transforms.RandomRotation(15),
transforms.CenterCrop(resize),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
])
因此在feature_imshow函数中我们可以利用mean和std来对图像归一化, 得到更好的呈现结果。
def feature_imshow(inp, title=None):
inp = inp.detach().numpy().transpose((1, 2, 0))
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]
inp = std * inp + mean
inp = np.clip(inp, 0, 1)
plt.imshow(inp)
if title is not None:
plt.title(title)
plt.axis('off')
plt.pause(0.001) # pause a bit so that plots are updated
plt.clf()
输入图像

中间特征(这里没有专门训练过,仅仅拿pretrain的来跑)
