基于UDP通信的虚拟红外测距仪
基于UDP通信的虚拟红外测距仪
分为两个部分
sensor:负责接收初始化信息并根据不同指令做出操作
以生成随机数的方式模拟时间测量
代码部分:
// Sensor_UDP.cpp: 定义控制台应用程序的入口点。
#include workstation:负责发送初始化信息,并通过用户输入不同指令进行指挥sensor操作,并对传输数据进行转换、记录、回查、显示
代码部分
#includeworkstation的show函数部分将在下篇文章中展示,包括dll封装及GUI设计也在以后推出,欢迎点赞收藏!
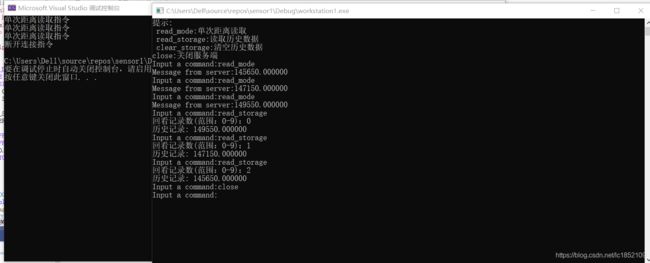
最终效果: