resnet50代码前向对齐
主要思路:先导入预训练模型,然后导出权重参数和npy输出,然后再将torch的代码对应的改写成paddle的代码,导入权重参数,输出npy文件,最后对比着两个npy文件即可
完整项目链接
1.安装pycharm
破解版的,直接安装就好
2.安装anconda
安装链接
3.安装paddlepaddle和torch
conda create -n resnet50 python=3.7
conda activate resnet50
conda install paddlepaddle --channel https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/Paddle/
pip install torch torchvision -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install torchvision
效果图:

4.resnet50_torch.py代码讲解

先导入预训练模型,然后开启预测模式(为了后面导出权重做准备)
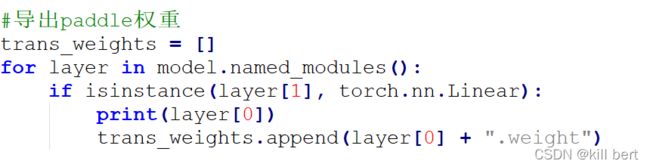
先定义了一个空列表,然后通过named_modules函数(获取网络结构)遍历所有的层,如果是线性层的话就会添加到这个列表中(在resnet中只有最后一层fc层是线性层,所以这段代码的意思就是先把resnet网络中的最后一层提取出来)
named_modules()函数和named_children( ):
从定义上讲:
named_children( ):返回包含子模块的迭代器,同时产生模块的名称以及模块本身。
named_modules( ):返回网络中所有模块的迭代器,同时产生模块的名称以及模块本身。
测试一下:
import torch
import torch.nn as nn
class TestModule(nn.Module):
def __init__(self):
super(TestModule,self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(16,32,3,1),
nn.ReLU(inplace=True)
)
self.layer2 = nn.Sequential(
nn.Linear(32,10)
)
def forward(self,x):
x = self.layer1(x)
x = self.layer2(x)
model = TestModule()
for name, module in model.named_children():
print('children module:', name)
for name, module in model.named_modules():
print('modules:', name)
>>out:
children module: layer1
children module: layer2
modules:
modules: layer1
modules: layer1.0
modules: layer1.1
modules: layer2
modules: layer2.0
可以看到named_children只输出了layer1和layer2两个子module,而named_modules输出了包括layer1和layer2下面所有的modolue。
所以可以利用named_modules()函数将网络结构打印出来,博主将结构打印到txt文件中以便查阅。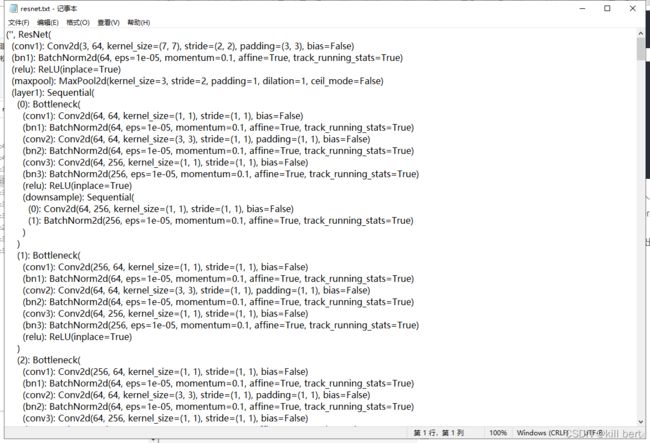
函数isinstance()可以判断一个变量的类型,既可以用在Python内置的数据类型如str、list、dict,也可以用在我们自定义的类,它们本质上都是数据类型。

model.state_dict():
这个函数是可以去获得模型的状态字典,这个字典是在定义后模型后自动生成的。
convert_param_dict(model_dict, trans_weights):
该函数是将torch中的状态字典转为paddle中的状态字典。
保存参数字典

保存输出

最后得到torch_resnet50.pkl和torch_resnet50.npy两个文件
至此就得到torch环境下的运行结果和paddle环境下的权重文件了,接下来就是要把torch的代码对应成paddle代码。
5.代码对齐
打开这个网站,使用浏览器的查找功能,对torch的API进行逐个比对
效果展示:
import paddle
import paddle.nn as nn
import pickle
import numpy as np
def conv3x3(in_planes, out_planes, stride = 1, groups = 1, dilation = 1):
"""3x3 convolution with padding"""
return nn.Conv2D(in_planes, out_planes, kernel_size=3, stride=stride,
padding=dilation, groups=groups, dilation=dilation)
def conv1x1(in_planes, out_planes, stride = 1):
"""1x1 convolution"""
return nn.Conv2D(in_planes, out_planes, kernel_size=1, stride=stride)
class BasicBlock(nn.Layer):
expansion = 1
def __init__(self,
inplanes,
planes,
stride=1,
downsample=None,
groups=1,
base_width=64,
dilation=1,
norm_layer=None):
super(BasicBlock, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2D
if groups != 1 or base_width != 64:
raise ValueError('BasicBlock only supports groups=1 and base_width=64')
if dilation > 1:
raise NotImplementedError(
"Dilation > 1 not supported in BasicBlock")
self.conv1 = nn.Conv2D(
inplanes, planes, 3, padding=1, stride=stride, bias_attr=False)
self.bn1 = norm_layer(planes)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2D(planes, planes, 3, padding=1, bias_attr=False)
self.bn2 = norm_layer(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class BottleneckBlock(nn.Layer):
expansion = 4
def __init__(self,
inplanes,
planes,
stride=1,
downsample=None,
groups=1,
base_width=64,
dilation=1,
norm_layer=None):
super(BottleneckBlock, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2D
width = int(planes * (base_width / 64.)) * groups
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU()
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Layer):
def __init__(
self,
block,
layers,
num_classes = 1000,
zero_init_residual = False,
groups = 1,
width_per_group = 64,
replace_stride_with_dilation = None,
norm_layer = None
):
super(ResNet, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2D
self._norm_layer = norm_layer
self.inplanes = 64
self.dilation = 1
if replace_stride_with_dilation is None:
# each element in the tuple indicates if we should replace
# the 2x2 stride with a dilated convolution instead
replace_stride_with_dilation = [False, False, False]
if len(replace_stride_with_dilation) != 3:
raise ValueError("replace_stride_with_dilation should be None "
"or a 3-element tuple, got {}".format(replace_stride_with_dilation))
self.groups = groups
self.base_width = width_per_group
self.conv1 = nn.Conv2D(3, self.inplanes, kernel_size=7, stride=2, padding=3)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool2D(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2,
dilate=replace_stride_with_dilation[0])
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
dilate=replace_stride_with_dilation[1])
self.layer4 = self._make_layer(block, 512, layers[3], stride=2,
dilate=replace_stride_with_dilation[2])
self.avgpool = nn.AdaptiveAvgPool2D((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
def _make_layer(self, block, planes, blocks,
stride = 1, dilate = False):
norm_layer = self._norm_layer
downsample = None
previous_dilation = self.dilation
if dilate:
self.dilation *= stride
stride = 1
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
conv1x1(self.inplanes, planes * block.expansion, stride),
norm_layer(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample, self.groups,
self.base_width, previous_dilation, norm_layer))
self.inplanes = planes * block.expansion
for _ in range(1, blocks):
layers.append(block(self.inplanes, planes, groups=self.groups,
base_width=self.base_width, dilation=self.dilation,
norm_layer=norm_layer))
return nn.Sequential(*layers)
def _forward_impl(self, x):
# See note [TorchScript super()]
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = paddle.flatten(x, 1)
x = self.fc(x)
return x
def forward(self, x):
return self._forward_impl(x)
def _resnet(arch, block, layers,**kwargs):
model = ResNet(block, layers,**kwargs)
return model
def resnet50(**kwargs):
return _resnet('resnet50', BottleneckBlock, [3, 4, 6, 3])
if __name__ == "__main__":
dummy_input = [paddle.ones(shape=[3, 224, 224])]
model = resnet50()
with open('torch_resnet50.pkl', 'rb') as f:
param2 = pickle.load(f)
model.set_state_dict(param2)
model.eval()
output = model(paddle.to_tensor(dummy_input))
np.save('paddle_resnet50.npy', output.numpy())
最后运行返回Ture即为成功
import numpy as np
paddle_output=np.load('paddle_resnet50.npy')
torch_output=np.load('torch_resnet50.npy')
print(np.allclose(paddle_output, torch_output, atol=1e-5))