ORB-SLAM2跑自己的数据集——保姆教学
首先要安装好ORB-SLAM2并成功跑通TUM等数据集,具体可以参照:
slam的环境配置大全–保姆教学
ORB_SLAM2代码的简介安装运行
有以上基础后就可以尝试自己制作数据集,用手机摄像头就可以完成。
迎浏览我的SLAM专栏,包括slam安装运行、代码注释、原理详解,一起加油淦穿SLAM。
只需要五步:
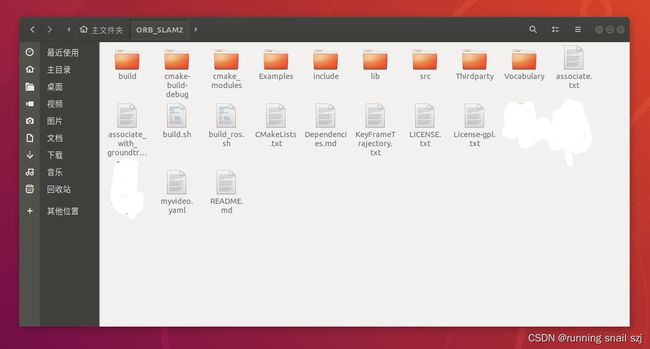
首先这是原本的ORB-SLAM2文件夹的样子:
然后这是可以跑自己数据集的ORB-SLAM2文件夹的样子:
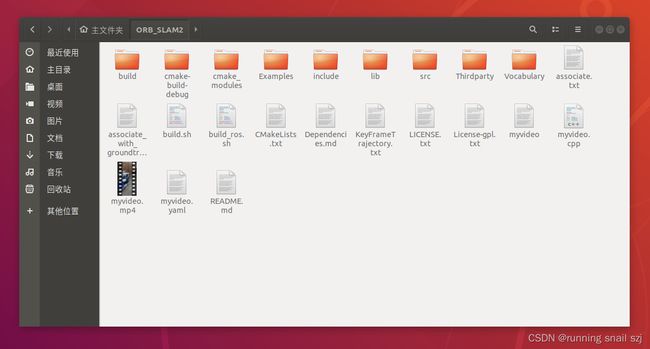
多了三个内容,修改了一个内容,你搞成我这样就可以运行。下边每一步代码直接复制即可,需要修改的地方会指出。
第一步:新建myvideo.yaml
在ORB-SLAM2文件夹打开终端,要新建一个myvideo.yaml,在终端输入:
gedit myvideo.yaml
打开新建的myvideo.yaml,直接复制输入下面的代码:
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 500.0
Camera.fy: 500.0
Camera.cx: 320.0
Camera.cy: 240.0
Camera.k1: 0
Camera.k2: 0
Camera.p1: 0
Camera.p2: 0
Camera.k3: 0
# Camera frames per second
Camera.fps: 30.0
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 10
ORBextractor.minThFAST: 5
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
(这一步是设置自己手机摄像头的参数,可以就按照这个用着,手机相机的参数差不多。想清楚设置自己手机相机的参数或者有其他设备,则另行百度)
第二步:新建myvideo.cpp
在ORB-SLAM2文件夹打开终端,要新建一个myvideo.cpp,在终端输入:
gedit myvideo.cpp
打开新建的myvideo.cpp,直接复制输入下面的代码。注意第9、10、12行,根据myvideo.yaml、ORBvoc.txt、myvideo.mp4的具体位置自行修改。
#include (这一步,若按照我的步骤是不需要修改的,第一步的myvideo.yaml就在ORB-SLAM2文件夹中,ORBvoc.txt下载自带的就在ORB-SLAM2文件夹的Vocabulary文件夹中,myvideo.mp4在第四步,也在ORB-SLAM2文件夹中)
三、修改CMakeLists.txt
打开ORB-SLAM2文件夹中的CMakeLists.txt,在最后复制添加以下代码并保存:
#生成调用myvideo.mp4 可执行文件
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR})
add_executable(myvideo myvideo.cpp)
target_link_libraries(myvideo ${PROJECT_NAME})
四、拍摄视频
用手机拍摄一段视频,我拍的学校图书馆内部的一段2分钟的视频。注意,在拍摄的一开始,要对准一个位置慢慢左右移动镜头(单目一开始要初始化),然后再四处走动拍摄其他地方,镜头旋转速度不要太快。
将拍好的视频上传到电脑,命名为myvideo.mp4,放在ORB-SLAM2文件夹中。
五、编译和运行
在ORB-SLAM2文件夹打开终端,直接复制下面代码即可运行啦:
cd ORB_SLAM2
mkdir build
cd build
cmake ..
make -j
cd ..
./myvideo #(执行)
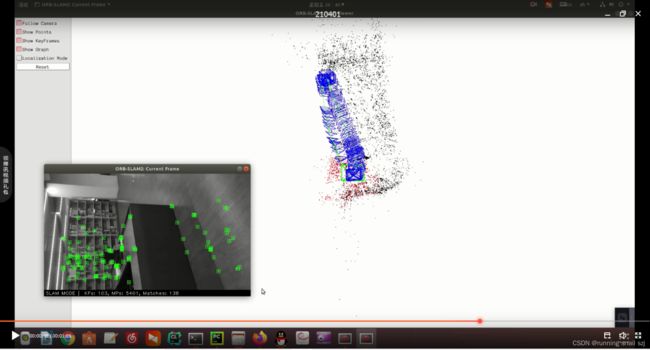
下为我的运行截图: