Dr_can模型预测控制笔记与代码实现
最近在准备毕业设计,通过看Dr_can的视频来学习一些控制方法,视频链接https://www.bilibili.com/video/BV1cL411n7KV/?spm_id_from=333.788.recommend_more_video.0
https://www.bilibili.com/video/BV1cL411n7KV/?spm_id_from=333.788.recommend_more_video.0
由于实际需要,后续应该会更新模型预测控制在非线性领域的应用(自适应MPC,增益调度MPC,非线性MPC)
1.最优控制与代价函数
最优控制(optimal control)指的是在一定的约束情况下达到最优状态的系统表现,其中约束情况通常是实际环境所带来的限制,比如说如果你去控制方向盘的转向,方向盘的转动自身是有一个极限位置的,再比如说,对于一个卫星控制系统,三轴输出的力,力矩都有自己的极大值。
而如何去定义一个最优状态呢?首先引入一个比较直观的例子,汽车的转向变道问题:
正常来说,汽车转向变道应当追求乘客舒适度情况,如下图;

但如果考虑到紧急避障的问题,那么答案就完全不同了,如下图,当汽车前方遭遇到一辆校车急刹车时,为了躲开它,汽车必须尽快地向一侧变道,而不考虑舒适度问题。

因此,最优是需要结合系统面临的实际情况得出的概念,对于不同的应用背景,应当设定不同的指标去衡量优劣,因此我们引入代价函数(Cost Function)的概念:
首先,对于单输入单输出系统(SISO)而言,衡量系统性能优劣可以用误差的积累值![]() (越小,代表误差越小,收敛越快)和输入的积累值
(越小,代表误差越小,收敛越快)和输入的积累值![]() (越小,代表控制耗能越少,越节约)来衡量。
(越小,代表控制耗能越少,越节约)来衡量。

由此,我们可以定义代价函数:
![]()
函数中的q,r分别表示一个增益系数,如果q大,表示希望误差变得更小,收敛更快;r大,表示更注重输入累积,更注重节能。
接下来,我们把其推广到多输入多输出系统(MIMO),使用状态空间描述为:(这里我们假设前馈矩阵为0)
![]()
![]()
此时,衡量系统表现优劣就要引入二次型的知识,我们定义:
这里的Q和R矩阵一般是我们设定的对角矩阵,我们来举一个简单的例子:
![]()
![]()
我们假定期望输入是0,那么:
![]()
![]()
![]()
![]()
我们可以通过代价函数J的大小,来衡量系统表现的优劣,当代价函数取最小值时得到的输入,即可被称为是一种“最优输入”。
2.模型预测控制的引入
那么为什么还要引入模型预测控制的概念呢?最优控制中的代价函数需要计算从0时刻到正无穷时刻的积分,这是一种很贪婪的行为,需要消耗大量算力;同时,系统如果是一个时变系统,或者面临扰动的话,前一时刻得到的最优并不一定是下一时刻的最优值。
因而我们引入模型预测控制(Model Predictive Control)的概念,对于一般的离散化系统(因为实际计算机实现的控制系统都是离散的系统,连续系统离散化的方法在此不述)。在k时刻,我们可以测量或估计出系统的当前状态y(k),再通过计算得到的u(k),u(k+1),u(k+2)...u(k+j)得到系统未来状态的估计值y(k+1),y(k+2)...y(k+j);我们将预测估计的部分称为预测区间(Predictive Horizon),将控制估计的部分称为控制区间(Control Horizon),在得到最优输入之后,我们只施加当前时刻的输入u(k),而放弃接下来得到的输入序列。

总结如下:模型预测控制在k时刻共需三步;
第一步:估计/测量读取系统的当前状态;
第二步:基于u(k),u(k+1),u(k+2)...u(k+j)进行最优化处理;
离散系统的代价函数可以参考

其中EN表示误差的终值,也是衡量优劣的一种标准。
第三步:只取u(k)作为控制输入施加在系统上。
在下一时刻重复以上三步,在下一步进行预测时使用的就是下一步的状态值,我们将这样的方案称为滚动优化控制(Receding Horizon Control)。
可以看到,每一时刻都需要进行一次预测,这对算力提出了巨大的要求,同时我们在此并没考虑约束问题,这个放在之后讨论。
3.最优化建模
实现MPC有许多方法,这里介绍一种方法:二次规划(Quadratic Programming)
我们首先引入一个离散系统:
![]()
我们定义:![]() 是k时刻预测的输入值,而
是k时刻预测的输入值,而![]() 是k时刻预测的状态值,我们设:
是k时刻预测的状态值,我们设:

对于期望输入为0,输出向量等于状态向量的离散系统:
![]()
![]()
![]()
我们可以得到代价函数:

其中,我们需要求解的是系统的输入u(k),这就需要我们把状态项x(k)给消除掉,处理这个事情需要利用系统的状态方程,首先有
![]()
我们可以通过传感器或者状态估计得到系统当前的状态值,这相当于系统的一个初值,由初值和状态方程可以得到其他项为:
![]()
![]()
![]()
![]()
我们把它简单整理一下,有:

我们再令:


我们就得到了最简单的形式:
即:
![]()
上式还可根据之前推导的公式继续化简,
其中,![]() 与
与![]() 互为转置,但他们彼此又都是常数,所以他们彼此相等,因此有:
互为转置,但他们彼此又都是常数,所以他们彼此相等,因此有:
![]()
再令![]()
有:
![]()
由此我们就得到了模型预测控制代价函数的简单形式。
4.一个详细建模实例与完整代码
下面直接上得到最优输入U_k的代码
function U_k=MPC(A,B,N,x_k,Q,R,F)
%%%%%%%%%%%%%%%%%%%%%%%%
n = size(A,1); %% A矩阵是n * n矩阵,得到A矩阵的维数
p = size(B,2); %% B矩阵是n * p矩阵,得到B矩阵的维数
M = [eye(n);zeros(N*n,n)]; %% 初始化M矩阵,第一个分块矩阵置单位阵,其余矩阵置零
C = zeros((N+1)*n,N*p); %% 初始化C矩阵,置零
%接下来计算完整的M矩阵与C矩阵
tmp = eye(n); %定义一个n阶单位阵,工具人
for i = 1:N
rows = i*n + (1:n);%行数,因为是分块矩阵所以从1至n;
C(rows, :) = [tmp*B, C(rows-n, 1:end-p)];%用遍历的方法将C矩阵填满;
tmp = A*tmp;%每次都左乘一次A矩阵;
M(rows,:) = tmp;%写满M矩阵;
end
%定义Q_bar和R_bar
S_q = size(Q,1);%得到Q矩阵维度
S_r = size(R,1);%得到R矩阵维度
Q_bar = zeros((N+1)*S_q,(N+1)*S_q);%定义Q_bar矩阵维度
R_bar = zeros(N*S_r,N*S_r);%定义R_bar矩阵维度
for i = 0:N-1
Q_bar(i*S_q+1:(i+1)*S_q,i*S_q+1:(i+1)*S_q) = Q;%把对角线上写满Q
end
Q_bar(N*S_q+1:(N+1)*S_q, N*S_q+1:(N+1)*S_q) = F;%最后一块写上F
for i = 0:N-1
R_bar(i*S_r+1:(i+1)*S_r, i*S_r+1:(i+1)*S_r) = R;%对角线上写满R
end
G = M'*Q_bar*M;%定义M矩阵,事实上在代价函数中,这和输入无关,并没有被用到
E = M'*Q_bar*C;%定义E矩阵
H = C'*Q_bar*C + R_bar;%定义H矩阵
%最优化,得到最优输入值
f = x_k'*E;%由于quadprog函数的定义,需要把其写成矩阵相乘形式
%基于实际情况,给输入加约束
D = eye(3);b = [10;10;10];Aep=[];Bep=[];c=[1;1;1];d=[-1;-1;-1];
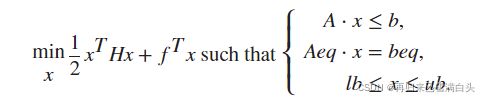
U_k = quadprog(H,f,D,b,Aep,Bep,d,c);%求解最优的U_k值代码中有几个值得注意的点:
1.矩阵的维度,这里面涉及矩阵很多,很容易把维度搞晕,建议自己手推一次,效果很好。
2.这段填满C矩阵的过程稍微有点难懂,是对照着C矩阵的结构以及里面的规律写出来的。
for i = 1:N
rows = i*n + (1:n);%行数,因为是分块矩阵所以从1至n;
C(rows, :) = [tmp*B, C(rows-n, 1:end-p)];%用遍历的方法将C矩阵填满;
tmp = A*tmp;%每次都左乘一次A矩阵;
M(rows,:) = tmp;%写满M矩阵;
end3.得到最优控制输入的函数quadprog,根据Matlab自带文档描述,它是求解下列问题最小值的函数,可以添加约束,由一个二次型描述与一个线性描述组成,为了使控制器的表现更贴近实际,我给输出加了正负1的限制。
接下来,我来做一个完整的仿真过程,并比对不同Q,F,R对系统的影响,假设有离散系统为:
![]()
![]()
我们设A矩阵,B矩阵分别为:
![]()
输出的期望值为零向量,设置不同的Q,R,F矩阵,进行仿真;
在第一种情况,我们令:
![]()
在第二种情况,我们令:
![]()
显然,在第一种情况我们更在意误差的收敛速度,而在第二种情况我们更在意能量消耗的多少,下面是仿真结果:



可以明显得看到,情况一收敛速度更快,耗能更多,而情况二收敛速度更慢,耗能更少,符合之前的预测。
下面是完整仿真代码:
%h为一个更新周期,即积分步长,采样时间为n
%假定输入为零,输出即为状态值
clear
clc
format long
%--------------------------初始参数---------------------------------%
h=0.1; %仿真步长
n=300; %仿真时间
NN=n/h;
A = [1,0.1;0,1]; %系统矩阵
B = [0;0.5]; %输入矩阵
Q = [2,0;0,2]; %Q矩阵,对误差积累的重视程度
R = 0.1; %R系数,表示对节省输入的重视程度
N = 3; %预测区间
F = [2,0;0,2]; %F矩阵,对终端误差的重视程度
x_0 = [100;100]; %初始位置
X1 = zeros(2,NN+1);
t = zeros(1,NN+1);
U1 = zeros(1,NN+1); %初始化
Eg1 = zeros(1,NN+1);
X1(:,1) = x_0; %赋初值
%--------------------------仿真1开始---------------------------------%
for j = 1:NN
U_all = MPC(A,B,N,X1(:,j),Q,R,F);
X1(:,j+1) = A*X1(:,j) + B*U_all(1); %这里只取预测估计的第一项
U1(j) = U_all(1);
t(j+1)=t(j)+h;
Eg1(j+1) = Eg1(j)+U_all(1)^2;
end
%%为了比较不同参数的影响,选择另一组Q,R,F
Q = [0.1,0;0,0.1]; %Q矩阵,对误差积累的重视程度
R = 10; %R系数,表示对节省输入的重视程度
F = [0.1,0;0,0.1]; %F矩阵,对终端误差的重视程度
X2 = zeros(2,NN+1);
U2 = zeros(1,NN+1); %初始化
Eg2 = zeros(1,NN+1);
X2(:,1) = x_0; %赋初值
%--------------------------仿真2开始---------------------------------%
for j = 1:NN
U_all = MPC(A,B,N,X2(:,j),Q,R,F);
X2(:,j+1) = A*X2(:,j) + B*U_all(1); %这里只取预测估计的第一项
U2(j) = U_all(1);
t(j+1)=t(j)+h;
Eg2(j+1) = Eg2(j)+U_all(1)^2;
end
figure(1)
subplot(2,1,1),plot(t,X1(1,:),'-','linewidth',3),title('状态向量'),ylabel('x_1');hold on;
plot(t,X2(1,:),'-','linewidth',2),title('状态向量'),ylabel('x_1');grid on;
legend('case1','case2');
subplot(2,1,2),plot(t,X1(2,:),'-','linewidth',3),xlabel('t/s'),ylabel('x_2');hold on
plot(t,X2(2,:),'-','linewidth',2),title('状态向量'),ylabel('x_2');grid on;
legend('case1','case2');
figure(2)
plot(t,U1,'linewidth',2),title('实际输入'),xlabel('t/s'),ylabel('u');hold on;
plot(t,U2,'linewidth',2),title('实际输入'),xlabel('t/s'),ylabel('u');grid on;
legend('case1','case2');
figure(3)
plot(t,Eg1,'linewidth',2),title('消耗能量'),xlabel('t/s'),ylabel('J');hold on;
plot(t,Eg2,'linewidth',2),title('消耗能量'),xlabel('t/s'),ylabel('J');grid on;
legend('case1','case2');