睿智的目标检测11——Keras搭建yolo3目标检测平台

置顶 Bubbliiiing 2019-11-27 17:33:51
 19069
19069

 收藏 195
收藏 195
19069
收藏 195
最后发布:2019-11-27 17:33:51首发:2019-11-27 17:33:51
原文链接:https://blog.csdn.net/weixin_44791964/article/details/103276106
19069
收藏 195
一起来看看yolo3的keras实现吧,顺便训练一下自己的数据。

https://github.com/bubbliiiing/yolo3-keras
喜欢的可以点个star噢。
视频教程可查看
https://www.bilibili.com/video/av77348259

YOLOv3相比于之前的yolo1和yolo2,改进较大,主要改进方向有:
1、主干网络修改为darknet53,其重要特点是使用了残差网络Residual,darknet53中的残差卷积就是进行一次3X3、步长为2的卷积,然后保存该卷积layer,再进行一次1X1的卷积和一次3X3的卷积,并把这个结果加上layer作为最后的结果, 残差网络的特点是容易优化,并且能够通过增加相当的深度来提高准确率。其内部的残差块使用了跳跃连接,缓解了在深度神经网络中增加深度带来的梯度消失问题。
2、darknet53的每一个卷积部分使用了特有的DarknetConv2D结构,每一次卷积的时候进行l2正则化,完成卷积后进行BatchNormalization标准化与LeakyReLU。普通的ReLU是将所有的负值都设为零,Leaky ReLU则是给所有负值赋予一个非零斜率。以数学的方式我们可以表示为:
实现代码为:
from functools import wraps
from keras.layers import Conv2D, Add, ZeroPadding2D, UpSampling2D, Concatenate, MaxPooling2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.normalization import BatchNormalization
from keras.regularizers import l2
from utils.utils import compose
#--------------------------------------------------#
# 单次卷积
#--------------------------------------------------#
@wraps(Conv2D)
def DarknetConv2D(args, **kwargs):
darknet_conv_kwargs = {‘kernel_regularizer’: l2(5e-4)}
darknet_conv_kwargs[‘padding’] = ‘valid’ if kwargs.get(‘strides’)==(2,2) else ‘same’
darknet_conv_kwargs.update(kwargs)
return Conv2D(args, **darknet_conv_kwargs)
#---------------------------------------------------#
# 卷积块
# DarknetConv2D + BatchNormalization + LeakyReLU
#---------------------------------------------------#
def DarknetConv2D_BN_Leaky(args, **kwargs):
no_bias_kwargs = {‘use_bias’: False}
no_bias_kwargs.update(kwargs)
return compose(
DarknetConv2D(args, **no_bias_kwargs),
BatchNormalization(),
LeakyReLU(alpha=0.1))
#---------------------------------------------------#
# 卷积块
# DarknetConv2D + BatchNormalization + LeakyReLU
#---------------------------------------------------#
def resblock_body(x, num_filters, num_blocks):
x = ZeroPadding2D(((1,0),(1,0)))(x)
x = DarknetConv2D_BN_Leaky(num_filters, (3,3), strides=(2,2))(x)
for i in range(num_blocks):
y = DarknetConv2D_BN_Leaky(num_filters//2, (1,1))(x)
y = DarknetConv2D_BN_Leaky(num_filters, (3,3))(y)
x = Add()([x,y])
return x
#---------------------------------------------------#
# darknet53 的主体部分
#---------------------------------------------------#
def darknet_body(x):
x = DarknetConv2D_BN_Leaky(32, (3,3))(x)
x = resblock_body(x, 64, 1)
x = resblock_body(x, 128, 2)
x = resblock_body(x, 256, 8)
feat1 = x
x = resblock_body(x, 512, 8)
feat2 = x
x = resblock_body(x, 1024, 4)
feat3 = x
return feat1,feat2,feat3
1、在特征利用部分,yolo3提取多特征层进行目标检测,一共提取三个特征层,三个特征层位于主干部分darknet53的不同位置,分别位于中间层,中下层,底层,三个特征层的shape分别为(52,52,256)、(26,26,512)、(13,13,1024)。
2、三个特征层进行5次卷积处理,处理完后一部分用于输出该特征层对应的预测结果,一部分用于进行反卷积UmSampling2d后与其它特征层进行结合。
3、输出层的shape分别为(13,13,75),(26,26,75),(52,52,75),最后一个维度为75是因为该图是基于voc数据集的,它的类为20种,yolo3只有针对每一个特征层存在3个先验框,所以最后维度为3x25;
如果使用的是coco训练集,类则为80种,最后的维度应该为255 = 3x85,三个特征层的shape为(13,13,255),(26,26,255),(52,52,255)
其实际情况就是,输入N张416x416的图片,在经过多层的运算后,会输出三个shape分别为(N,13,13,255),(N,26,26,255),(N,52,52,255)的数据,对应每个图分为13x13、26x26、52x52的网格上3个先验框的位置。
实现代码如下:
from functools import wraps
import numpy as np
import tensorflow as tf
from keras import backend as K
from keras.layers import Conv2D, Add, ZeroPadding2D, UpSampling2D, Concatenate, MaxPooling2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.normalization import BatchNormalization
from keras.models import Model
from keras.regularizers import l2
from nets.darknet53 import darknet_body
from utils.utils import compose
#--------------------------------------------------#
# 单次卷积
#--------------------------------------------------#
@wraps(Conv2D)
def DarknetConv2D(args, **kwargs):
darknet_conv_kwargs = {‘kernel_regularizer’: l2(5e-4)}
darknet_conv_kwargs[‘padding’] = ‘valid’ if kwargs.get(‘strides’)==(2,2) else ‘same’
darknet_conv_kwargs.update(kwargs)
return Conv2D(args, **darknet_conv_kwargs)
#---------------------------------------------------#
# 卷积块
# DarknetConv2D + BatchNormalization + LeakyReLU
#---------------------------------------------------#
def DarknetConv2D_BN_Leaky(args, **kwargs):
no_bias_kwargs = {‘use_bias’: False}
no_bias_kwargs.update(kwargs)
return compose(
DarknetConv2D(args, **no_bias_kwargs),
BatchNormalization(),
LeakyReLU(alpha=0.1))
#---------------------------------------------------#
# 特征层->最后的输出
#---------------------------------------------------#
def make_last_layers(x, num_filters, out_filters):
# 五次卷积
x = DarknetConv2D_BN_Leaky(num_filters, (1,1))(x)
x = DarknetConv2D_BN_Leaky(num_filters2, (3,3))(x)
x = DarknetConv2D_BN_Leaky(num_filters, (1,1))(x)
x = DarknetConv2D_BN_Leaky(num_filters2, (3,3))(x)
x = DarknetConv2D_BN_Leaky(num_filters, (1,1))(x)
# 将最后的通道数调整为outfilter
y = DarknetConv2D_BN_Leaky(num_filters*2, (3,3))(x)
y = DarknetConv2D(out_filters, (1,1))(y)
return x, y
#---------------------------------------------------#
# 特征层->最后的输出
#---------------------------------------------------#
def yolo_body(inputs, num_anchors, num_classes):
# 生成darknet53的主干模型
feat1,feat2,feat3 = darknet_body(inputs)
darknet = Model(inputs, feat3)
# 第一个特征层
# y1=(batch_size,13,13,3,85)
x, y1 = make_last_layers(darknet.output, 512, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(256, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,feat2])
# 第二个特征层
# y2=(batch_size,26,26,3,85)
x, y2 = make_last_layers(x, 256, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(128, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,feat1])
# 第三个特征层
# y3=(batch_size,52,52,3,85)
x, y3 = make_last_layers(x, 128, num_anchors*(num_classes+5))
return Model(inputs, [y1,y2,y3])
由第二步我们可以获得三个特征层的预测结果,shape分别为(N,13,13,255),(N,26,26,255),(N,52,52,255)的数据,对应每个图分为13x13、26x26、52x52的网格上3个预测框的位置。
但是这个预测结果并不对应着最终的预测框在图片上的位置,还需要解码才可以完成。
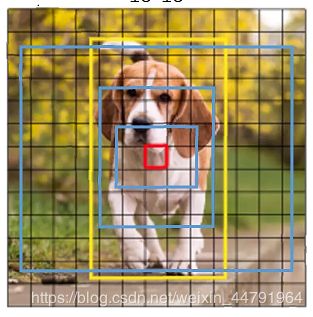
此处要讲一下yolo3的预测原理,yolo3的3个特征层分别将整幅图分为13x13、26x26、52x52的网格,每个网络点负责一个区域的检测。
我们知道特征层的预测结果对应着三个预测框的位置,我们先将其reshape一下,其结果为(N,13,13,3,85),(N,26,26,3,85),(N,52,52,3,85)。
最后一个维度中的85包含了4+1+80,分别代表x_offset、y_offset、h和w、置信度、分类结果。
yolo3的解码过程就是将每个网格点加上它对应的x_offset和y_offset,加完后的结果就是预测框的中心,然后再利用 先验框和h、w结合 计算出预测框的长和宽。这样就能得到整个预测框的位置了。
当然得到最终的预测结构后还要进行得分排序与非极大抑制筛选
这一部分基本上是所有目标检测通用的部分。不过该项目的处理方式与其它项目不同。其对于每一个类进行判别。
1、取出每一类得分大于self.obj_threshold的框和得分。
2、利用框的位置和得分进行非极大抑制。
实现代码如下,当调用yolo_eval时,就会对每个特征层进行解码:
#---------------------------------------------------# # 将预测值的每个特征层调成真实值 #---------------------------------------------------# def yolo_head(feats, anchors, num_classes, input_shape, calc_loss=False): num_anchors = len(anchors) # [1, 1, 1, num_anchors, 2] anchors_tensor = K.reshape(K.constant(anchors), [1, 1, 1, num_anchors, 2])# 获得x,y的网格 # (13, 13, 1, 2) grid_shape = K.shape(feats)[1:3] # height, width grid_y = K.tile(K.reshape(K.arange(0, stop=grid_shape[0]), [-1, 1, 1, 1]), [1, grid_shape[1], 1, 1]) grid_x = K.tile(K.reshape(K.arange(0, stop=grid_shape[1]), [1, -1, 1, 1]), [grid_shape[0], 1, 1, 1]) grid = K.concatenate([grid_x, grid_y]) grid = K.cast(grid, K.dtype(feats)) # (batch_size,13,13,3,85) feats = K.reshape(feats, [-1, grid_shape[0], grid_shape[1], num_anchors, num_classes + 5]) # 将预测值调成真实值 # box_xy对应框的中心点 # box_wh对应框的宽和高 box_xy = (K.sigmoid(feats[..., :2]) + grid) / K.cast(grid_shape[::-1], K.dtype(feats)) box_wh = K.exp(feats[..., 2:4]) * anchors_tensor / K.cast(input_shape[::-1], K.dtype(feats)) box_confidence = K.sigmoid(feats[..., 4:5]) box_class_probs = K.sigmoid(feats[..., 5:]) # 在计算loss的时候返回如下参数 if calc_loss == True: return grid, feats, box_xy, box_wh return box_xy, box_wh, box_confidence, box_class_probs
#---------------------------------------------------#
# 对box进行调整,使其符合真实图片的样子
#---------------------------------------------------#
def yolo_correct_boxes(box_xy, box_wh, input_shape, image_shape):
box_yx = box_xy[..., ::-1]
box_hw = box_wh[..., ::-1]
input_shape = K.cast(input_shape, K.dtype(box_yx))
image_shape = K.cast(image_shape, K.dtype(box_yx))
new_shape = K.round(image_shape * K.min(input_shape/image_shape))
offset = (input_shape-new_shape)/2./input_shape
scale = input_shape/new_shape
box_yx = (box_yx - offset) * scale
box_hw *= scale
box_mins = box_yx - (box_hw / 2.)
box_maxes = box_yx + (box_hw / 2.)
boxes = K.concatenate([
box_mins[..., 0:1], # y_min
box_mins[..., 1:2], # x_min
box_maxes[..., 0:1], # y_max
box_maxes[..., 1:2] # x_max
])
boxes *= K.concatenate([image_shape, image_shape])
return boxes
#---------------------------------------------------#
# 获取每个box和它的得分
#---------------------------------------------------#
def yolo_boxes_and_scores(feats, anchors, num_classes, input_shape, image_shape):
# 将预测值调成真实值
# box_xy对应框的中心点
# box_wh对应框的宽和高
# -1,13,13,3,2; -1,13,13,3,2; -1,13,13,3,1; -1,13,13,3,80
box_xy, box_wh, box_confidence, box_class_probs = yolo_head(feats, anchors, num_classes, input_shape)
# 将box_xy、和box_wh调节成y_min,y_max,xmin,xmax
boxes = yolo_correct_boxes(box_xy, box_wh, input_shape, image_shape)
# 获得得分和box
boxes = K.reshape(boxes, [-1, 4])
box_scores = box_confidence * box_class_probs
box_scores = K.reshape(box_scores, [-1, num_classes])
return boxes, box_scores
#---------------------------------------------------#
# 图片预测
#---------------------------------------------------#
def yolo_eval(yolo_outputs,
anchors,
num_classes,
image_shape,
max_boxes=20,
score_threshold=.6,
iou_threshold=.5):
# 获得特征层的数量
num_layers = len(yolo_outputs)
# 特征层1对应的anchor是678
# 特征层2对应的anchor是345
# 特征层3对应的anchor是012
anchor_mask = [[6,7,8], [3,4,5], [0,1,2]]
input_shape = K.shape(yolo_outputs[0])[1:3] * 32
boxes = []
box_scores = []
# 对每个特征层进行处理
for l in range(num_layers):
_boxes, _box_scores = yolo_boxes_and_scores(yolo_outputs[l], anchors[anchor_mask[l]], num_classes, input_shape, image_shape)
boxes.append(_boxes)
box_scores.append(_box_scores)
# 将每个特征层的结果进行堆叠
boxes = K.concatenate(boxes, axis=0)
box_scores = K.concatenate(box_scores, axis=0)
mask = box_scores >= score_threshold
max_boxes_tensor = K.constant(max_boxes, dtype='int32')
boxes_ = []
scores_ = []
classes_ = []
for c in range(num_classes):
# 取出所有box_scores >= score_threshold的框,和成绩
class_boxes = tf.boolean_mask(boxes, mask[:, c])
class_box_scores = tf.boolean_mask(box_scores[:, c], mask[:, c])
# 非极大抑制,去掉box重合程度高的那一些
nms_index = tf.image.non_max_suppression(
class_boxes, class_box_scores, max_boxes_tensor, iou_threshold=iou_threshold)
# 获取非极大抑制后的结果
# 下列三个分别是
# 框的位置,得分与种类
class_boxes = K.gather(class_boxes, nms_index)
class_box_scores = K.gather(class_box_scores, nms_index)
classes = K.ones_like(class_box_scores, 'int32') * c
boxes_.append(class_boxes)
scores_.append(class_box_scores)
classes_.append(classes)
boxes_ = K.concatenate(boxes_, axis=0)
scores_ = K.concatenate(scores_, axis=0)
classes_ = K.concatenate(classes_, axis=0)
return boxes_, scores_, classes_
通过第三步,我们可以获得预测框在原图上的位置,而且这些预测框都是经过筛选的。这些筛选后的框可以直接绘制在图片上,就可以获得结果了。
在计算loss的时候,实际上是y_pre和y_true之间的对比:
y_pre就是一幅图像经过网络之后的输出,内部含有三个特征层的内容;其需要解码才能够在图上作画
y_true就是一个真实图像中,它的每个真实框对应的(13,13)、(26,26)、(52,52)网格上的偏移位置、长宽与种类。其仍需要编码才能与y_pred的结构一致
实际上y_pre和y_true内容的shape都是
(batch_size,13,13,3,85)
(batch_size,26,26,3,85)
(batch_size,52,52,3,85)
对于yolo3的模型来说,网络最后输出的内容就是三个特征层每个网格点对应的预测框及其种类,即三个特征层分别对应着图片被分为不同size的网格后,每个网格点上三个先验框对应的位置、置信度及其种类。
对于输出的y1、y2、y3而言,[…, : 2]指的是相对于每个网格点的偏移量,[…, 2: 4]指的是宽和高,[…, 4: 5]指的是该框的置信度,[…, 5: ]指的是每个种类的预测概率。
现在的y_pre还是没有解码的,解码了之后才是真实图像上的情况。
y_true就是一个真实图像中,它的每个真实框对应的(13,13)、(26,26)、(52,52)网格上的偏移位置、长宽与种类。其仍需要编码才能与y_pred的结构一致
在yolo3中,其使用了一个专门的函数用于处理读取进来的图片的框的真实情况。
def preprocess_true_boxes(true_boxes, input_shape, anchors, num_classes):
其输入为:
true_boxes:shape为(m, T, 5)代表m张图T个框的x_min、y_min、x_max、y_max、class_id。
input_shape:输入的形状,此处为416、416
anchors:代表9个先验框的大小
num_classes:种类的数量。
其实对真实框的处理是将真实框转化成图片中相对网格的xyhw,步骤如下:
1、取框的真实值,获取其框的中心及其宽高,除去input_shape变成比例的模式。
2、建立全为0的y_true,y_true是一个列表,包含三个特征层,shape分别为(m,13,13,3,85),(m,26,26,3,85),(m,52,52,3,85)。
3、对每一张图片处理,将每一张图片中的真实框的wh和先验框的wh对比,计算IOU值,选取其中IOU最高的一个,得到其所属特征层及其网格点的位置,在对应的y_true中将内容进行保存。
for t, n in enumerate(best_anchor): for l in range(num_layers): if n in anchor_mask[l]:# 计算该目标在第l个特征层所处网格的位置 i = np.floor(true_boxes[b,t,0]*grid_shapes[l][1]).astype('int32') j = np.floor(true_boxes[b,t,1]*grid_shapes[l][0]).astype('int32') # 找到best_anchor索引的索引 k = anchor_mask[l].index(n) c = true_boxes[b,t, 4].astype('int32') # 保存到y_true中 y_true[l][b, j, i, k, 0:4] = true_boxes[b,t, 0:4] y_true[l][b, j, i, k, 4] = 1 y_true[l][b, j, i, k, 5+c] = 1
对于最后输出的y_true而言,只有每个图里每个框最对应的位置有数据,其它的地方都为0。
preprocess_true_boxes全部的代码如下:
#---------------------------------------------------# # 读入xml文件,并输出y_true #---------------------------------------------------# def preprocess_true_boxes(true_boxes, input_shape, anchors, num_classes):assert (true_boxes[..., 4]<num_classes).all(), 'class id must be less than num_classes' # 一共有三个特征层数 num_layers = len(anchors)//3 # 先验框 # 678为116,90, 156,198, 373,326 # 345为30,61, 62,45, 59,119 # 012为10,13, 16,30, 33,23, anchor_mask = [[6,7,8], [3,4,5], [0,1,2]] if num_layers==3 else [[3,4,5], [1,2,3]] true_boxes = np.array(true_boxes, dtype='float32') input_shape = np.array(input_shape, dtype='int32') # 416,416 # 读出xy轴,读出长宽 # 中心点(m,n,2) boxes_xy = (true_boxes[..., 0:2] + true_boxes[..., 2:4]) // 2 boxes_wh = true_boxes[..., 2:4] - true_boxes[..., 0:2] # 计算比例 true_boxes[..., 0:2] = boxes_xy/input_shape[:] true_boxes[..., 2:4] = boxes_wh/input_shape[:] # m张图 m = true_boxes.shape[0] # 得到网格的shape为13,13;26,26;52,52 grid_shapes = [input_shape//{0:32, 1:16, 2:8}[l] for l in range(num_layers)] # y_true的格式为(m,13,13,3,85)(m,26,26,3,85)(m,52,52,3,85) y_true = [np.zeros((m,grid_shapes[l][0],grid_shapes[l][1],len(anchor_mask[l]),5+num_classes), dtype='float32') for l in range(num_layers)] # [1,9,2] anchors = np.expand_dims(anchors, 0) anchor_maxes = anchors / 2. anchor_mins = -anchor_maxes # 长宽要大于0才有效 valid_mask = boxes_wh[..., 0]>0 for b in range(m): # 对每一张图进行处理 wh = boxes_wh[b, valid_mask[b]] if len(wh)==0: continue # [n,1,2] wh = np.expand_dims(wh, -2) box_maxes = wh / 2. box_mins = -box_maxes # 计算真实框和哪个先验框最契合 intersect_mins = np.maximum(box_mins, anchor_mins) intersect_maxes = np.minimum(box_maxes, anchor_maxes) intersect_wh = np.maximum(intersect_maxes - intersect_mins, 0.) intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1] box_area = wh[..., 0] * wh[..., 1] anchor_area = anchors[..., 0] * anchors[..., 1] iou = intersect_area / (box_area + anchor_area - intersect_area) # (n) 感谢 消尽不死鸟 的提醒 best_anchor = np.argmax(iou, axis=-1) for t, n in enumerate(best_anchor): for l in range(num_layers): if n in anchor_mask[l]: # floor用于向下取整 i = np.floor(true_boxes[b,t,0]*grid_shapes[l][1]).astype('int32') j = np.floor(true_boxes[b,t,1]*grid_shapes[l][0]).astype('int32') # 找到真实框在特征层l中第b副图像对应的位置 k = anchor_mask[l].index(n) c = true_boxes[b,t, 4].astype('int32') y_true[l][b, j, i, k, 0:4] = true_boxes[b,t, 0:4] y_true[l][b, j, i, k, 4] = 1 y_true[l][b, j, i, k, 5+c] = 1 return y_true
在得到了y_pre和y_true后怎么对比呢?不是简单的减一下就可以的呢。
loss值需要对三个特征层进行处理,这里以最小的特征层为例。
1、利用y_true取出该特征层中真实存在目标的点的位置(m,13,13,3,1)及其对应的种类(m,13,13,3,80)。
2、将yolo_outputs的预测值输出进行处理,得到reshape后的预测值y_pre,shape分别为(m,13,13,3,85),(m,26,26,3,85),(m,52,52,3,85)。还有解码后的xy,wh。
3、获取真实框编码后的值,后面用于计算loss,编码后的值其含义与y_pre相同,可用于计算loss。
4、对于每一幅图,计算其中所有真实框与预测框的IOU,取出每个网络点中IOU最大的先验框,如果这个最大的IOU都小于ignore_thresh,则保留,一般来说ignore_thresh取0.5,该步的目的是为了平衡负样本。
5、计算xy和wh上的loss,其计算的是实际上存在目标的,利用第三步真实框编码后的的结果和未处理的预测结果进行对比得到loss。
6、计算置信度的loss,其有两部分构成,第一部分是实际上存在目标的,预测结果中置信度的值与1对比;第二部分是实际上不存在目标的,在第四步中得到其最大IOU的值与0对比。
7、计算预测种类的loss,其计算的是实际上存在目标的,预测类与真实类的差距。
其实际上计算的总的loss是三个loss的和,这三个loss分别是:
其实际代码如下,使用yolo_loss就可以获得loss值:
import numpy as np
import tensorflow as tf
from keras import backend as K
#---------------------------------------------------#
# 将预测值的每个特征层调成真实值
#---------------------------------------------------#
def yolo_head(feats, anchors, num_classes, input_shape, calc_loss=False):
num_anchors = len(anchors)
# [1, 1, 1, num_anchors, 2]
anchors_tensor = K.reshape(K.constant(anchors), [1, 1, 1, num_anchors, 2])
# 获得x,y的网格
# (13, 13, 1, 2)
grid_shape = K.shape(feats)[1:3] # height, width
grid_y = K.tile(K.reshape(K.arange(0, stop=grid_shape[0]), [-1, 1, 1, 1]),
[1, grid_shape[1], 1, 1])
grid_x = K.tile(K.reshape(K.arange(0, stop=grid_shape[1]), [1, -1, 1, 1]),
[grid_shape[0], 1, 1, 1])
grid = K.concatenate([grid_x, grid_y])
grid = K.cast(grid, K.dtype(feats))
# (batch_size,13,13,3,85)
feats = K.reshape(feats, [-1, grid_shape[0], grid_shape[1], num_anchors, num_classes + 5])
# 将预测值调成真实值
# box_xy对应框的中心点
# box_wh对应框的宽和高
box_xy = (K.sigmoid(feats[..., :2]) + grid) / K.cast(grid_shape[::-1], K.dtype(feats))
box_wh = K.exp(feats[..., 2:4]) * anchors_tensor / K.cast(input_shape[::-1], K.dtype(feats))
box_confidence = K.sigmoid(feats[..., 4:5])
box_class_probs = K.sigmoid(feats[..., 5:])
# 在计算loss的时候返回如下参数
if calc_loss == True:
return grid, feats, box_xy, box_wh
return box_xy, box_wh, box_confidence, box_class_probs
#---------------------------------------------------#
# 用于计算每个预测框与真实框的iou
#---------------------------------------------------#
def box_iou(b1, b2):
# 13,13,3,1,4
# 计算左上角的坐标和右下角的坐标
b1 = K.expand_dims(b1, -2)
b1_xy = b1[..., :2]
b1_wh = b1[..., 2:4]
b1_wh_half = b1_wh/2.
b1_mins = b1_xy - b1_wh_half
b1_maxes = b1_xy + b1_wh_half
# 1,n,4
# 计算左上角和右下角的坐标
b2 = K.expand_dims(b2, 0)
b2_xy = b2[..., :2]
b2_wh = b2[..., 2:4]
b2_wh_half = b2_wh/2.
b2_mins = b2_xy - b2_wh_half
b2_maxes = b2_xy + b2_wh_half
# 计算重合面积
intersect_mins = K.maximum(b1_mins, b2_mins)
intersect_maxes = K.minimum(b1_maxes, b2_maxes)
intersect_wh = K.maximum(intersect_maxes - intersect_mins, 0.)
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
b1_area = b1_wh[..., 0] * b1_wh[..., 1]
b2_area = b2_wh[..., 0] * b2_wh[..., 1]
iou = intersect_area / (b1_area + b2_area - intersect_area)
return iou
#---------------------------------------------------#
# loss值计算
#---------------------------------------------------#
def yolo_loss(args, anchors, num_classes, ignore_thresh=.5, print_loss=False):
# 一共有三层
num_layers = len(anchors)//3
# 将预测结果和实际ground truth分开,args是[*model_body.output, *y_true]
# y_true是一个列表,包含三个特征层,shape分别为(m,13,13,3,85),(m,26,26,3,85),(m,52,52,3,85)。
# yolo_outputs是一个列表,包含三个特征层,shape分别为(m,13,13,3,85),(m,26,26,3,85),(m,52,52,3,85)。
y_true = args[num_layers:]
yolo_outputs = args[:num_layers]
# 先验框
# 678为116,90, 156,198, 373,326
# 345为30,61, 62,45, 59,119
# 012为10,13, 16,30, 33,23,
anchor_mask = [[6,7,8], [3,4,5], [0,1,2]] if num_layers==3 else [[3,4,5], [1,2,3]]
# 得到input_shpae为416,416
input_shape = K.cast(K.shape(yolo_outputs[0])[1:3] * 32, K.dtype(y_true[0]))
# 得到网格的shape为13,13;26,26;52,52
grid_shapes = [K.cast(K.shape(yolo_outputs[l])[1:3], K.dtype(y_true[0])) for l in range(num_layers)]
loss = 0
# 取出每一张图片
# m的值就是batch_size
m = K.shape(yolo_outputs[0])[0]
mf = K.cast(m, K.dtype(yolo_outputs[0]))
# y_true是一个列表,包含三个特征层,shape分别为(m,13,13,3,85),(m,26,26,3,85),(m,52,52,3,85)。
# yolo_outputs是一个列表,包含三个特征层,shape分别为(m,13,13,3,85),(m,26,26,3,85),(m,52,52,3,85)。
for l in range(num_layers):
# 以第一个特征层(m,13,13,3,85)为例子
# 取出该特征层中存在目标的点的位置。(m,13,13,3,1)
object_mask = y_true[l][..., 4:5]
# 取出其对应的种类(m,13,13,3,80)
true_class_probs = y_true[l][..., 5:]
# 将yolo_outputs的特征层输出进行处理
# grid为网格结构(13,13,1,2),raw_pred为尚未处理的预测结果(m,13,13,3,85)
# 还有解码后的xy,wh,(m,13,13,3,2)
grid, raw_pred, pred_xy, pred_wh = yolo_head(yolo_outputs[l],
anchors[anchor_mask[l]], num_classes, input_shape, calc_loss=True)
# 这个是解码后的预测的box的位置
# (m,13,13,3,4)
pred_box = K.concatenate([pred_xy, pred_wh])
# 找到负样本群组,第一步是创建一个数组,[]
ignore_mask = tf.TensorArray(K.dtype(y_true[0]), size=1, dynamic_size=True)
object_mask_bool = K.cast(object_mask, 'bool')
# 对每一张图片计算ignore_mask
def loop_body(b, ignore_mask):
# 取出第b副图内,真实存在的所有的box的参数
# n,4
true_box = tf.boolean_mask(y_true[l][b,...,0:4], object_mask_bool[b,...,0])
# 计算预测结果与真实情况的iou
# pred_box为13,13,3,4
# 计算的结果是每个pred_box和其它所有真实框的iou
# 13,13,3,n
iou = box_iou(pred_box[b], true_box)
# 13,13,3,1
best_iou = K.max(iou, axis=-1)
# 判断预测框的iou小于ignore_thresh则认为该预测框没有与之对应的真实框
# 则被认为是这幅图的负样本
ignore_mask = ignore_mask.write(b, K.cast(best_iou<ignore_thresh, K.dtype(true_box)))
return b+1, ignore_mask
# 遍历所有的图片
_, ignore_mask = K.control_flow_ops.while_loop(lambda b,*args: b<m, loop_body, [0, ignore_mask])
# 将每幅图的内容压缩,进行处理
ignore_mask = ignore_mask.stack()
#(m,13,13,3,1,1)
ignore_mask = K.expand_dims(ignore_mask, -1)
# 将真实框进行编码,使其格式与预测的相同,后面用于计算loss
raw_true_xy = y_true[l][..., :2]*grid_shapes[l][:] - grid
raw_true_wh = K.log(y_true[l][..., 2:4] / anchors[anchor_mask[l]] * input_shape[::-1])
# object_mask如果真实存在目标则保存其wh值
# switch接口,就是一个if/else条件判断语句
raw_true_wh = K.switch(object_mask, raw_true_wh, K.zeros_like(raw_true_wh))
box_loss_scale = 2 - y_true[l][...,2:3]*y_true[l][...,3:4]
xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(raw_true_xy, raw_pred[...,0:2], from_logits=True)
wh_loss = object_mask * box_loss_scale * 0.5 * K.square(raw_true_wh-raw_pred[...,2:4])
# 如果该位置本来有框,那么计算1与置信度的交叉熵
# 如果该位置本来没有框,而且满足best_iou<ignore_thresh,则被认定为负样本
# best_iou<ignore_thresh用于限制负样本数量
confidence_loss = object_mask * K.binary_crossentropy(object_mask, raw_pred[...,4:5], from_logits=True)+ \
(1-object_mask) * K.binary_crossentropy(object_mask, raw_pred[...,4:5], from_logits=True) * ignore_mask
class_loss = object_mask * K.binary_crossentropy(true_class_probs, raw_pred[...,5:], from_logits=True)
xy_loss = K.sum(xy_loss) / mf
wh_loss = K.sum(wh_loss) / mf
confidence_loss = K.sum(confidence_loss) / mf
class_loss = K.sum(class_loss) / mf
loss += xy_loss + wh_loss + confidence_loss + class_loss
if print_loss:
loss = tf.Print(loss, [loss, xy_loss, wh_loss, confidence_loss, class_loss, K.sum(ignore_mask)], message='loss: ')
return loss
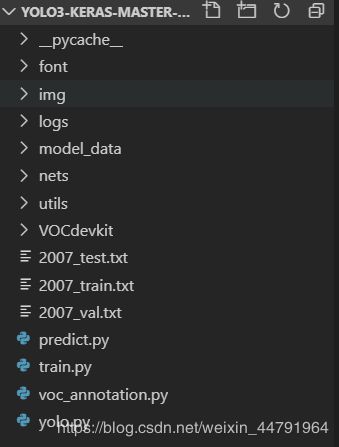
yolo3整体的文件夹构架如下:
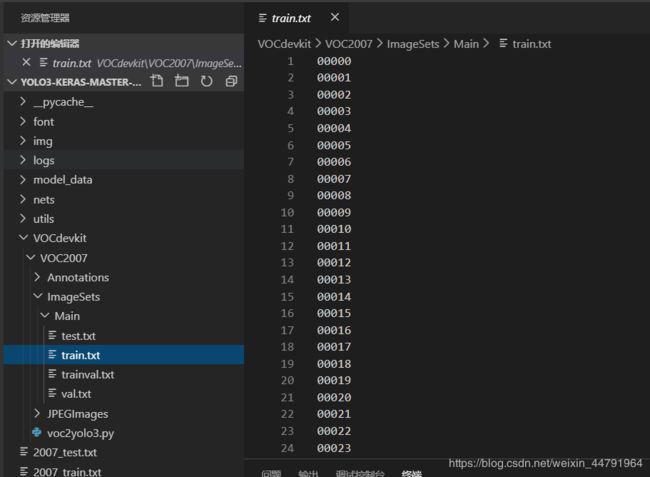
本文使用VOC格式进行训练。
训练前将标签文件放在VOCdevkit文件夹下的VOC2007文件夹下的Annotation中。

训练前将图片文件放在VOCdevkit文件夹下的VOC2007文件夹下的JPEGImages中。

在训练前利用voc2yolo3.py文件生成对应的txt。
再运行根目录下的voc_annotation.py,运行前需要将classes改成你自己的classes。
classes = ["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"]
就会生成对应的2007_train.txt,每一行对应其图片位置及其真实框的位置。

在训练前需要修改model_data里面的voc_classes.txt文件,需要将classes改成你自己的classes。
运行train.py即可开始训练。
