【进阶篇】全流程学习《20天掌握Pytorch实战》纪实 | Day02 | 图片数据建模流程范例
作者简介:大家好,我是车神哥,府学路18号的车神
⚡About—>车神:从寝室到实验室最快3分钟,最慢3分半(那半分钟其实是等红绿灯)
个人主页:车手只需要车和手,压力来自论文_府学路18号车神_CSDN博客
官方认证:人工智能领域优质创作者
点赞➕评论➕收藏 == 养成习惯(一键三连)⚡希望大家多多支持~一起加油
专栏
《20天掌握Pytorch实战》
不定期学习《20天掌握Pytorch实战》,有兴趣就跟着专栏一起吧~
开源自由,知识无价~
最近读Paper,发现有很多提出的改进和创新都存在很多trick,无法复现。看到一句话,真的很戳搞科研的心,但也很现实:
很多的邻域门槛很低,当某一天那些灌水的paper干不过在网络搜出来的东西,那么这波人也就自动消失了。我们到底应不应该花大量的时间阅读那些最新的研究?应该,但更多的时候,它们不配。
图片数据建模流程范例
- 前言:torch和torchvision安装
- 概览
- 一、 准备数据
- 二、 定义模型
- 三、训练模型
- 四、评估模型
- 五、使用模型
- 六、保存模型
- Reference
前言:torch和torchvision安装
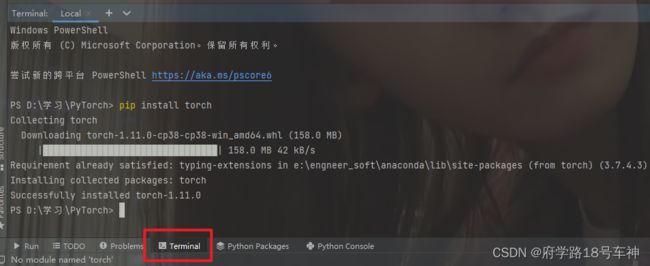
由于我是在PyCharm中进行实验的,所以需要自行安装torch的库,和其他的库安装一样,直接在Terminal中pip就OK了。
pip install torchpip install torchvision -i https://pypi.tuna.tsinghua.edu.cn/simple/
整个安装过程可能有点慢,包也比较大,耐心等待即可。
如果是使用Jupyter notebook的同学,可以直接使用。(mac系统上pytorch和matplotlib在jupyter中同时跑需要更改环境变量)
所用到的源代码及书籍+数据集以帮各位小伙伴下载放在文末,自取即可~
概览
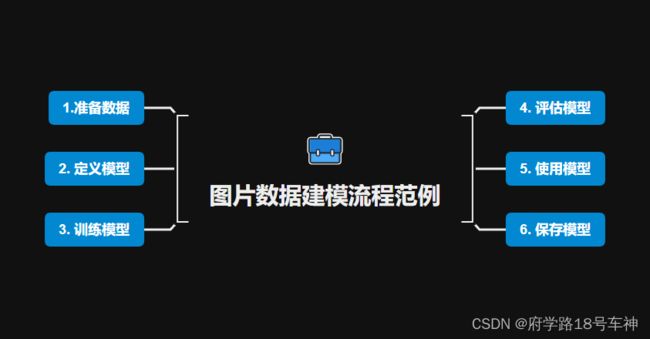
一、 准备数据
老规矩,后面模型的history需要获取每次迭代的时间,下面的打印时间代码必备~
import os
import datetime
#打印时间
def printbar():
nowtime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print("\n"+"=========="*8 + "%s"%nowtime)
#mac系统上pytorch和matplotlib在jupyter中同时跑需要更改环境变量
os.environ["KMP_DUPLICATE_LIB_OK"]="TRUE"
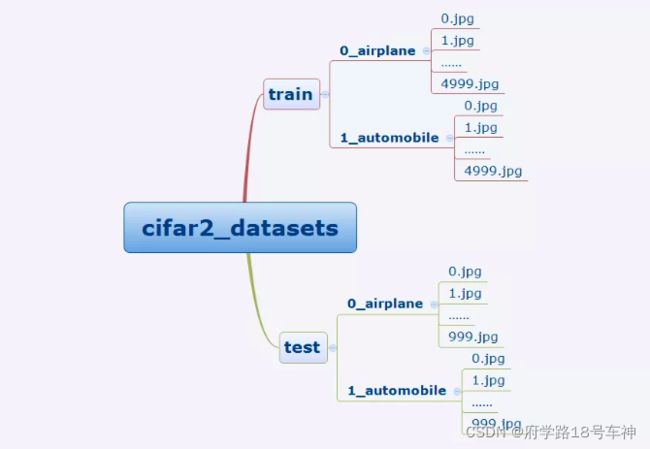
cifar2数据集为cifar10数据集的子集,只包括前两种类别airplane和automobile。
训练集有airplane和automobile图片各5000张,测试集有airplane和automobile图片各1000张。
cifar2任务的目标是训练一个模型来对飞机airplane和机动车automobile两种图片进行分类。
我们准备的Cifar2数据集的文件结构如下所示。
在Pytorch中构建图片数据管道通常有两种方法。
-
第一种是使用 torchvision中的datasets.ImageFolder来读取图片然后用 DataLoader来并行加载。
-
第二种是通过继承 torch.utils.data.Dataset 实现用户自定义读取逻辑然后用 DataLoader来并行加载。
第二种方法是读取用户自定义数据集的通用方法,既可以读取图片数据集,也可以读取文本数据集。
文档中只介绍了第一种方法,那就直接搞起来吧~
和上一篇的数据构建有所不同
导入库
import torch
from torch import nn
from torch.utils.data import Dataset,DataLoader
from torchvision import transforms,datasets
有的小伙伴可能也没有安装torchvision,下面给出安装的指令,同样也是在terminal命令行:
pip install torchvision -i https://pypi.tuna.tsinghua.edu.cn/simple/
国内由于网速的限制,使用命令安装时需在后面加上清华的镜像,这样下载速度会大大提升,安装更容易成功。
下面简单介绍一下torchvision :
torchvision是PyTorch中专门用来处理图像的库。这个包中有四个大类。
torchvision.datasets: 用来进行数据加载的,PyTorch团队在这个包中帮我们提前处理好了很多很多图片数据集。
torchvision.models: 为我们提供了已经训练好的模型,让我们可以加载之后,直接使用。
torchvision.transforms: 提供了一般的图像转换操作类
torchvision.utils: 数据处理工作箱,包括四个类,具体可以参考 这里。
- 划分数据集
transform_train = transforms.Compose(
[transforms.ToTensor()])
transform_valid = transforms.Compose(
[transforms.ToTensor()])
ds_train = datasets.ImageFolder("./data/cifar2/train/",
transform = transform_train,target_transform= lambda t:torch.tensor([t]).float()) # 训练集构建
ds_valid = datasets.ImageFolder("./data/cifar2/test/",
transform = transform_train,target_transform= lambda t:torch.tensor([t]).float()) # 验证集构建
print(ds_train.class_to_idx) # 输出训练集的类别与index,按顺序为这些类别定义索引为0,1...
关于ImageFolder
ImageFolder是一个通用的数据加载器,它要求我们以下面这种格式来组织数据集的训练、验证或者测试图片。
参数解析:
dataset=torchvision.datasets.ImageFolder(
root, transform=None,
target_transform=None,
loader=<function default_loader>,
is_valid_file=None)
root:图片存储的根目录,即各类别文件夹所在目录的上一级目录。transform:对图片进行预处理的操作(函数),原始图片作为输入,返回一个转换后的图片。target_transform:对图片类别进行预处理的操作,输入为 target,输出对其的转换。 如果不传该参数,即对 target 不做任何转换,返回的顺序索引 0,1, 2…loader:表示数据集加载方式,通常默认加载方式即可。is_valid_file:获取图像文件的路径并检查该文件是否为有效文件的函数(用于检查损坏文件)
返回的dataset都有以下三种属性:
self.classes:用一个 list 保存类别名称self.class_to_idx:类别对应的索引,与不做任何转换返回的 target 对应self.imgs:保存(img-path, class) tuple的 list
运行结果:
{'0_airplane': 0, '1_automobile': 1}
- 加载数据
dl_train = DataLoader(ds_train,batch_size = 50,shuffle = True,num_workers=0) # ds_train表示加载的数据集;batch_size:每批次加载了50个样本;num_workers:加载数据的子进程数有3个
dl_valid = DataLoader(ds_valid,batch_size = 50,shuffle = True,num_workers=0) # 验证集的数据加载如上
用到了torch.utils.data.DataLoader
- DataLoader(
dataset, batch_size=1, shuffle=False, sampler=None, batch_sampler=None, num_workers=0, collate_fn=, pin_memory=False, drop_last=False, timeout=0, worker_init_fn=None)
参数说明:
- dataset (Dataset): 加载数据的数据集
- batch_size (int, optional): 每批加载多少个样本
- shuffle (bool, optional): 设置为“真”时,在每个epoch对数据打乱.(默认:False)
- sampler (Sampler, optional): 定义从数据集中提取样本的策略,返回一个样本
- batch_sampler (Sampler, optional): like sampler, but returns a batch of indices at a time 返回一批样本. 与atch_size, shuffle, sampler和
drop_last互斥.- num_workers (int, optional): 用于加载数据的子进程数。0表示数据将在主进程中加载。(默认:0)
- collate_fn (callable, optional): 合并样本列表以形成一个 mini-batch. # callable可调用对象
- pin_memory (bool, optional): 如果为 True, 数据加载器会将张量复制到 CUDA 固定内存中,然后再返回它们.
- drop_last (bool, optional): 设定为 True 如果数据集大小不能被批量大小整除的时候, 将丢掉最后一个不完整的batch,(默认:False).
- timeout (numeric, optional): 如果为正值,则为从工作人员收集批次的超时值。应始终是非负的。(默认:0)
- worker_init_fn (callable, optional): If not None, this will be called on each worker subprocess with the worker id (an int in
[0, num_workers - 1]) as input, after seeding and before data loading.
(default: None).
这里提供下官方的手册:
- torch.utils.data官方手册
- torch.utils.data官方手册中文翻译
下面准备数据的最后一步,查看上面加载到管道的数据,我们根据文档内容通过循环遍历输出图片:
# %matplotlib inline
# %config InlineBackend.figure_format = 'svg'
#查看部分样本
from matplotlib import pyplot as plt
plt.figure(figsize=(8,8)) # 设置图片大小,matplot就不解释了,过于基础
for i in range(9): # 循环遍历9个图片
img,label = ds_train[i]
img = img.permute(1,2,0)
ax=plt.subplot(3,3,i+1)
ax.imshow(img.numpy())
ax.set_title("label = %d"%label.item())
ax.set_xticks([])
ax.set_yticks([])
plt.show()

原始数据集图像和上面加载出来的一致,由于图片像素极低,放大后更低更模糊了。
# Pytorch的图片默认顺序是 Batch,Channel,Width,Height
for x,y in dl_train:
print(x.shape,y.shape)
break
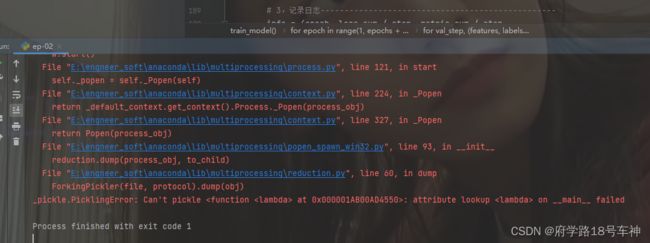
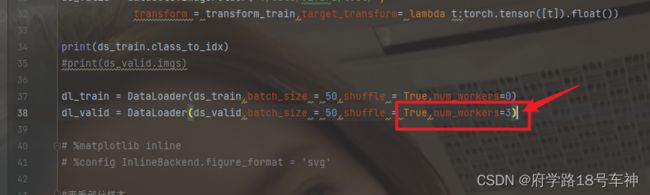
注意:这里运行会报错,文档作者不知道是不是会报错,反正我的报错了。已经有博主解决这个问题啦~
原因:datasets.ImageFolder使用了lambda函数,cell4中num_workers被设置为3,这两个因素共同作用导致报错。解决方法:依旧是在jupyter notebook环境中,把num_workers=3改为num_workers=0
输出:
torch.Size([50, 3, 32, 32]) torch.Size([50, 1]) # 分别表示(batch size:50, channel:3, height:32, width::32)
对torch.Size的理解:
- torch.Size括号中有几个数字就是几维
- 第一层(最外层)中括号里面包含了两个中括号(以逗号进行分割),这就是(2,3,4)中的2
第二层中括号里面包含了三个中括号(以逗号进行分割),这就是(2,3,4)中的3
第三层中括号里面包含了四个数(以逗号进行分割),这就是(2,3,4)中的4
二、 定义模型
使用Pytorch通常有三种方式构建模型:使用nn.Sequential按层顺序构建模型,继承nn.Module基类构建自定义模型,继承nn.Module基类构建模型并辅助应用模型容器(nn.Sequential,nn.ModuleList,nn.ModuleDict)进行封装。
此处选择通过继承nn.Module基类构建自定义模型。
#测试AdaptiveMaxPool2d的效果
pool = nn.AdaptiveAvgPool2d((1, 1)) # 输出尺寸指定为1*1
t = torch.randn(10, 8, 32, 32) #
print(pool(t).shape)
关于nn.AdaptiveMaxPool2d的解释:
- class torch.nn.AdaptiveMaxPool2d(
output_size, return_indices=False)
对输入信号,提供2维的自适应最大池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。可以用来实现全局平均最大池化层output_size=1.
output_size: 输出信号的尺寸,可以用(H,W)表示HW的输出,也可以使用数字H表示HH大小的输出return_indices: 如果设置为True,会返回输出的索引。对 nn.MaxUnpool2d有用,默认值是False
关于torch.randn的解释:
- torch.randn(
*size, *, out=None, dtype=None, layout=torch.strided, device=None, requires_grad=False) → Tensor
返回一个符合均值为0,方差为1的正态分布(标准正态分布)中填充随机数的张量
参数解释:
size(int…)--定义输出张量形状的整数序列。可以是数量可变的参数,也可以是列表或元组之类的集合。
Keyword Arguments:
out(Tensor, optional) --输出张量dtype(torch.dtype, optional) --返回张量所需的数据类型。默认:如果没有,使用全局默认值layout(torch.layout, optional) --返回张量的期望布局。默认值:torch.strideddevice(torch.device, optional) --返回张量的所需 device。默认:如果没有,则使用当前设备作为默认张量类型.(CPU或CUDA)requires_grad(bool, optional) –autograd是否应该记录对返回张量的操作(说明当前量是否需要在计算中保留对应的梯度信息)。默认值:False。
输出结果:
torch.Size([10, 8, 1, 1])
- 模型构建
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3,out_channels=32,kernel_size = 3)
self.pool = nn.MaxPool2d(kernel_size = 2,stride = 2)
self.conv2 = nn.Conv2d(in_channels=32,out_channels=64,kernel_size = 5)
self.dropout = nn.Dropout2d(p = 0.1)
self.adaptive_pool = nn.AdaptiveMaxPool2d((1,1))
self.flatten = nn.Flatten()
self.linear1 = nn.Linear(64,32)
self.relu = nn.ReLU()
self.linear2 = nn.Linear(32,1)
self.sigmoid = nn.Sigmoid()
def forward(self,x):
"""
前向传播函数
:param x: 输入,tensor 类型
:return: 返回结果
"""
x = self.conv1(x)
x = self.pool(x)
x = self.conv2(x)
x = self.pool(x)
x = self.dropout(x)
x = self.adaptive_pool(x)
x = self.flatten(x)
x = self.linear1(x)
x = self.relu(x)
x = self.linear2(x)
y = self.sigmoid(x)
return y
net = Net()
print(net)
- 输出打印出来构建的整个网络的具体信息,如池化层、优化器、卷积等设置:
Net(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1))
(pool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1))
(dropout): Dropout2d(p=0.1, inplace=False)
(adaptive_pool): AdaptiveMaxPool2d(output_size=(1, 1))
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear1): Linear(in_features=64, out_features=32, bias=True)
(relu): ReLU()
(linear2): Linear(in_features=32, out_features=1, bias=True)
(sigmoid): Sigmoid()
)
一一解释上面构建的网络:
nn.Conv2d:Conv2d(in_channels, out_channels, kernel_size, stride=1,padding=0, dilation=1, groups=1,bias=True, padding_mode=‘zeros’)
in_channels:输入的通道数目 【必选】out_channels: 输出的通道数目 【必选】kernel_size:卷积核的大小,类型为int或者元组,当卷积是方形的时候,只需要一个整数边长即可,卷积不是方形,要输入一个元组表示 高和宽。【必选】stride:卷积每次滑动的步长为多少,默认是 1 【可选】padding: 设置在所有边界增加 值为 0 的边距的大小(也就是在feature map外围增加几圈 0 ),例如当 padding =1 的时候,如果原来大小为 3 × 3 ,那么之后的大小为 5 × 5 。即在外围加了一圈0 。【可选】dilation:控制卷积核之间的间距【可选】groups:控制输入和输出之间的连接。(不常用)【可选】bias: 是否将一个 学习到的 bias 增加输出中,默认是 True 。【可选】padding_mode: 字符串类型,接收的字符串只有 “zeros” 和 “circular”。【可选】注意 :参数 kernel_size,stride,padding,dilation 都可以是一个整数或者是一个元组,一个值的情况将会同时作用于高和宽 两个维度,两个值的元组情况代表分别作用于 高 和 宽 维度。
nn.MaxPool2d:
class torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
参数解释:
kernel_size:表示做最大池化的窗口大小,可以是单个值,也可以是tuple元组stride:步长,可以是单个值,也可以是tuple元组padding:填充,可以是单个值,也可以是tuple元组dilation:控制窗口中元素步幅return_indices:布尔类型,返回最大值位置索引ceil_mode:布尔类型,为True,用向上取整的方法,计算输出形状;默认是向下取整。
具体参数的详解在:这里
也可在官方文档内查询。
nn.Dropout2d:为了防止或减轻过拟合而使用的函数,它一般用在全连接层
Dropout就是在不同的训练过程中随机扔掉一部分神经元。也就是让某个神经元的激活值以一定的概率p,让其停止工作,这次训练过程中不更新权值,也不参加神经网络的计算。但是它的权重得保留下来(只是暂时不更新而已),因为下次样本输入时它可能又得工作了。Dropout常常用于抑制过拟合,pytorch也提供了很方便的函数。但是经常不知道dropout的参数p是什么意思。在TensorFlow中p叫做keep_prob,就一直以为pytorch中的p应该就是保留节点数的比例,但是实验结果发现反了,实际上表示的是不保留节点数的比例。
nn.AdaptiveMaxPool2d:
class torch.nn.AdaptiveMaxPool2d(output_size, return_indices=False)
对输入信号,提供2维的自适应最大池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。可以用来实现全局平均最大池化层output_size=1.
参数:
output_size: 输出信号的尺寸,可以用(H,W)表示HW的输出,也可以使用数字H表示HH大小的输出return_indices: 如果设置为True,会返回输出的索引。对nn.MaxUnpool2d有用,默认值是False
nn.Flatten():
torch.nn.Flatten(),因为其被用在神经网络中,输入为一批数据,第一维为batch,通常要把一个数据拉成一维,而不是将一批数据拉为一维。所以torch.nn.Flatten()默认从第二维开始平坦化。
nn.Linear:
torch.nn.Linear(in_features, out_features, bias=True)
nn.Linear()是用于设置网络中的全连接层的,需要注意在二维图像处理的任务中,全连接层的输入与输出一般都设置为二维张量,形状通常为[batch_size, size],不同于卷积层要求输入输出是四维张量。
参数:
in_features指的是输入的二维张量的大小,即输入的[batch_size, size]中的size。out_features指的是输出的二维张量的大小,即输出的二维张量的形状为[batch_size,output_size],当然,它也代表了该全连接层的神经元个数。
从输入输出的张量的shape角度来理解,相当于一个输入为[batch_size, in_features]的张量变换成了[batch_size, out_features]的输出张量。
nn.ReLU:
class torch.nn.ReLU(inplace: bool = False)
线性整流函数(Rectified Linear Unit, ReLU),又称修正线性单元。其定义如下图,在横坐标的右侧,ReLU函数为线性函数。在横坐标的右侧,ReLU函数为值为0。
![]()
参数:
inplace=True:inplace为True,将会改变输入的数据,否则不会改变原输入,只会产生新的输出
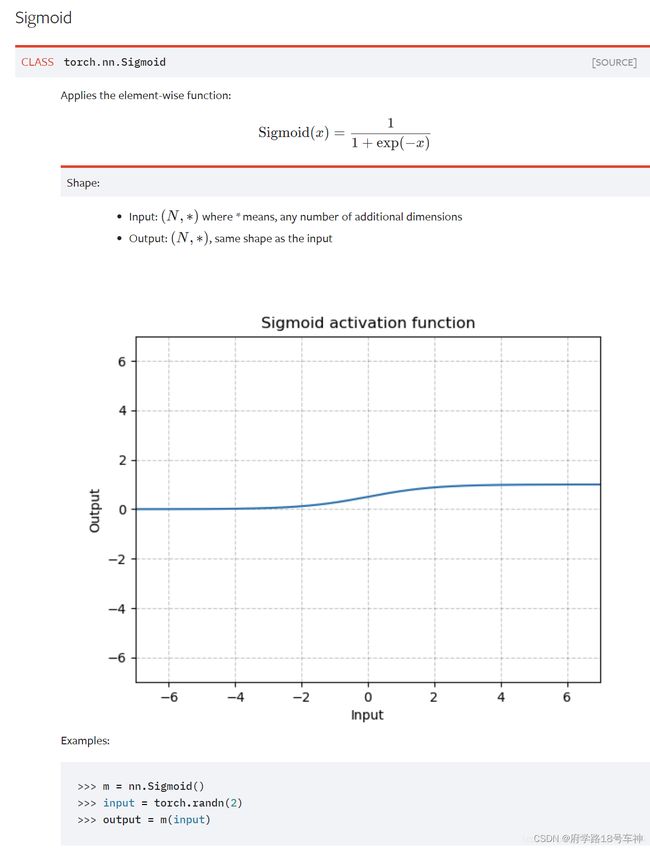
nn.Sigmoid:
import torchkeras
torchkeras.summary(net,input_shape= (3,32,32))
输出:
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 32, 30, 30] 896
MaxPool2d-2 [-1, 32, 15, 15] 0
Conv2d-3 [-1, 64, 11, 11] 51,264
MaxPool2d-4 [-1, 64, 5, 5] 0
Dropout2d-5 [-1, 64, 5, 5] 0
AdaptiveMaxPool2d-6 [-1, 64, 1, 1] 0
Flatten-7 [-1, 64] 0
Linear-8 [-1, 32] 2,080
ReLU-9 [-1, 32] 0
Linear-10 [-1, 1] 33
Sigmoid-11 [-1, 1] 0
================================================================
Total params: 54,273
Trainable params: 54,273
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.011719
Forward/backward pass size (MB): 0.359634
Params size (MB): 0.207035
Estimated Total Size (MB): 0.578388
----------------------------------------------------------------
Process finished with exit code 0
torchkeras.summary:打印显示网络结构和参数
打印出来配置的网络参数
三、训练模型
Pytorch通常需要用户编写自定义训练循环,训练循环的代码风格因人而异。
有3类典型的训练循环代码风格:脚本形式训练循环,函数形式训练循环,类形式训练循环。
此处介绍一种较通用的函数形式训练循环。
和之前的训练模型的循环方式类似
import pandas as pd
from sklearn.metrics import roc_auc_score
model = net
model.optimizer = torch.optim.SGD(model.parameters(),lr = 0.01) # 优化器配置:SGD随机梯度下降法
model.loss_func = torch.nn.BCELoss() # 构建损失函数
model.metric_func = lambda y_pred,y_true: roc_auc_score(y_true.data.numpy(),y_pred.data.numpy()) # roc_auc_score:求随机森林的AUC值
model.metric_name = "auc"
from sklearn.metrics import roc_auc_score
直接根据真实值(必须是二值)、预测值(可以是0/1,也可以是proba值)计算出auc值,中间过程的roc计算省略。
函数形式训练循环:
def train_step(model,features,labels):
# 训练模式,dropout层发生作用
model.train()
# 梯度清零
model.optimizer.zero_grad()
# 正向传播求损失
predictions = model(features)
loss = model.loss_func(predictions,labels)
metric = model.metric_func(predictions,labels)
# 反向传播求梯度
loss.backward()
model.optimizer.step()
return loss.item(),metric.item()
def valid_step(model,features,labels):
# 预测模式,dropout层不发生作用
model.eval()
# 关闭梯度计算
with torch.no_grad():
predictions = model(features)
loss = model.loss_func(predictions,labels)
metric = model.metric_func(predictions,labels)
return loss.item(), metric.item()
# 测试train_step效果
features,labels = next(iter(dl_train))
print(train_step(model, features, labels))
结果:
(0.6913514733314514, 0.5057471264367817)
训练模型:
def train_model(model,epochs,dl_train,dl_valid,log_step_freq):
metric_name = model.metric_name
dfhistory = pd.DataFrame(columns = ["epoch","loss",metric_name,"val_loss","val_"+metric_name])
print("Start Training...")
nowtime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print("=========="*8 + "%s"%nowtime)
for epoch in range(1,epochs+1):
# 1,训练循环-------------------------------------------------
loss_sum = 0.0
metric_sum = 0.0
step = 1
for step, (features,labels) in enumerate(dl_train, 1):
loss,metric = train_step(model,features,labels)
# 打印batch级别日志
loss_sum += loss
metric_sum += metric
if step%log_step_freq == 0:
print(("[step = %d] loss: %.3f, "+metric_name+": %.3f") %
(step, loss_sum/step, metric_sum/step))
# 2,验证循环-------------------------------------------------
val_loss_sum = 0.0
val_metric_sum = 0.0
val_step = 1
for val_step, (features,labels) in enumerate(dl_valid, 1):
val_loss,val_metric = valid_step(model,features,labels)
val_loss_sum += val_loss
val_metric_sum += val_metric
# 3,记录日志-------------------------------------------------
info = (epoch, loss_sum/step, metric_sum/step,
val_loss_sum/val_step, val_metric_sum/val_step)
dfhistory.loc[epoch-1] = info
# 打印epoch级别日志
print(("\nEPOCH = %d, loss = %.3f,"+ metric_name + \
" = %.3f, val_loss = %.3f, "+"val_"+ metric_name+" = %.3f")
%info)
nowtime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print("\n"+"=========="*8 + "%s"%nowtime)
print('Finished Training...')
return dfhistory
epochs = 20
dfhistory = train_model(model,epochs,dl_train,dl_valid,log_step_freq = 50)
注意:这里还是会报错,和Day01的一样,只需将
num_workers=3改为num_workers=0即可。如下位置,修改。
测试结果:
迭代20个epoch,需要等待几分钟。
Start Training...
================================================================================2022-04-10 21:26:09
[step = 50] loss: 0.690, auc: 0.633
[step = 100] loss: 0.688, auc: 0.665
[step = 150] loss: 0.686, auc: 0.688
[step = 200] loss: 0.684, auc: 0.703
EPOCH = 1, loss = 0.684,auc = 0.703, val_loss = 0.673, val_auc = 0.825
================================================================================2022-04-10 21:26:23
[step = 50] loss: 0.672, auc: 0.773
[step = 100] loss: 0.669, auc: 0.772
[step = 150] loss: 0.665, auc: 0.774
[step = 200] loss: 0.660, auc: 0.776
EPOCH = 2, loss = 0.660,auc = 0.776, val_loss = 0.632, val_auc = 0.831
================================================================================2022-04-10 21:26:33
[step = 50] loss: 0.631, auc: 0.785
[step = 100] loss: 0.624, auc: 0.789
[step = 150] loss: 0.616, auc: 0.792
[step = 200] loss: 0.608, auc: 0.795
EPOCH = 3, loss = 0.608,auc = 0.795, val_loss = 0.559, val_auc = 0.835
......
[step = 50] loss: 0.401, auc: 0.913
[step = 100] loss: 0.399, auc: 0.915
[step = 150] loss: 0.394, auc: 0.916
[step = 200] loss: 0.393, auc: 0.917
EPOCH = 18, loss = 0.393,auc = 0.917, val_loss = 0.361, val_auc = 0.930
================================================================================2022-04-10 21:29:10
[step = 50] loss: 0.388, auc: 0.932
[step = 100] loss: 0.387, auc: 0.926
[step = 150] loss: 0.387, auc: 0.924
[step = 200] loss: 0.385, auc: 0.924
EPOCH = 19, loss = 0.385,auc = 0.924, val_loss = 0.332, val_auc = 0.935
================================================================================2022-04-10 21:29:20
[step = 50] loss: 0.420, auc: 0.919
[step = 100] loss: 0.393, auc: 0.923
[step = 150] loss: 0.384, auc: 0.924
[step = 200] loss: 0.382, auc: 0.927
EPOCH = 20, loss = 0.382,auc = 0.927, val_loss = 0.343, val_auc = 0.938
================================================================================2022-04-10 21:29:29
Finished Training...
Process finished with exit code 0
简单小节一下,通过day01的标准流程,基本大体思路还是了解了,模型训练好后,后期就验证、评估、应用了。重点还是在本小节的模型构建和训练。建议自己写一遍,模仿循环的写法,能够自己掌握最后。加油
四、评估模型
查看迭代的结果:
print(dfhistory)
结果显示:
epoch loss auc val_loss val_auc
0 1.0 0.687199 0.689893 0.677973 0.819231
1 2.0 0.670937 0.787023 0.655124 0.826957
2 3.0 0.639157 0.797640 0.605008 0.823746
3 4.0 0.584120 0.800266 0.539534 0.828455
4 5.0 0.541584 0.808271 0.508139 0.837285
5 6.0 0.520896 0.819290 0.490145 0.846948
6 7.0 0.511996 0.825061 0.483156 0.852856
7 8.0 0.502265 0.833139 0.470060 0.860686
8 9.0 0.496100 0.838961 0.461913 0.867318
9 10.0 0.487518 0.845759 0.457740 0.870174
10 11.0 0.481599 0.853748 0.444433 0.876784
11 12.0 0.470809 0.860611 0.436102 0.886181
12 13.0 0.459603 0.867360 0.430747 0.892251
13 14.0 0.451145 0.876519 0.438098 0.897483
14 15.0 0.438103 0.885233 0.402668 0.903118
15 16.0 0.428677 0.896389 0.459490 0.908623
16 17.0 0.418870 0.902935 0.375793 0.918269
17 18.0 0.420009 0.909187 0.359411 0.925013
18 19.0 0.405186 0.913822 0.345665 0.929664
19 20.0 0.393956 0.921699 0.335796 0.938696
可视化部分:
# %matplotlib inline
# %config InlineBackend.figure_format = 'svg'
import matplotlib.pyplot as plt
def plot_metric(dfhistory, metric):
train_metrics = dfhistory[metric]
val_metrics = dfhistory['val_'+metric]
epochs = range(1, len(train_metrics) + 1)
plt.plot(epochs, train_metrics, 'bo--')
plt.plot(epochs, val_metrics, 'ro-')
plt.title('Training and validation '+ metric)
plt.xlabel("Epochs")
plt.ylabel(metric)
plt.legend(["train_"+metric, 'val_'+metric])
plt.show()
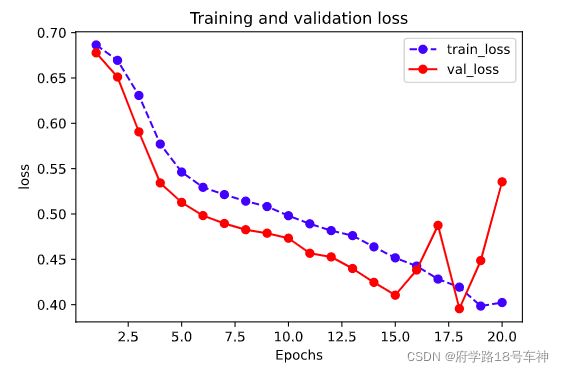
plot_metric(dfhistory,"loss")
结果:
plot_metric(dfhistory,"auc")
结果:
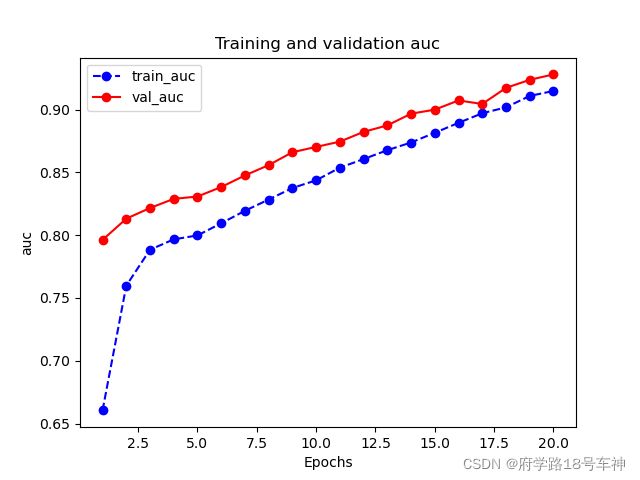
模型训练完后,迭代次数越多精确度越高。从上上图中,在epoch=16~18的时候,验证集的损失值呈现震荡,或许陷入了局部最优,又导致了跳出最优后面epoch=20,loss又上升了。
五、使用模型
模型预测的应用
def predict(model,dl):
model.eval()
with torch.no_grad():
result = torch.cat([model.forward(t[0]) for t in dl])
return(result.data)
#预测概率
y_pred_probs = predict(model,dl_valid)
print(y_pred_probs)
预测的结果:
tensor([[0.3127],
[0.0375],
[0.1940],
...,
[0.6114],
[0.2975],
[0.9395]])
预测类别:
#预测类别
y_pred = torch.where(y_pred_probs>0.5,
torch.ones_like(y_pred_probs),torch.zeros_like(y_pred_probs))
print(y_pred)
预测的结果:
tensor([[0.],
[0.],
[0.],
...,
[1.],
[0.],
[1.]])
torch.cat:是将两个张量(tensor)拼接在一起,cat是concatenate的意思,即拼接,联系在一起。torch.ones_like函数和torch.zeros_like函数的基本功能是根据给定张量,生成与其形状相同的全1张量或全0张量.
图片的预测和之前的结构化数据模型有区别,
torch.cat和torch.ones_like、torch.zeros_like的操作得熟记。
六、保存模型
在Day01的最后提到了两种模型保存的方式,后面应该也只选择了一种方式。那咱们就记住了哈~
- 推荐使用
保存参数方式保存Pytorch模型。
print(model.state_dict().keys())
输出显示:
odict_keys(['conv1.weight', 'conv1.bias', 'conv2.weight', 'conv2.bias', 'linear1.weight', 'linear1.bias', 'linear2.weight', 'linear2.bias'])
保存模型的代码:
# 保存模型参数
torch.save(model.state_dict(), "./data/model_parameter.pkl")
net_clone = Net()
net_clone.load_state_dict(torch.load("./data/model_parameter.pkl"))
predict(net_clone,dl_valid)
提醒记牢,建议自己多写,这样记忆深刻。
保存结果:
tensor([[0.0204],
[0.7692],
[0.4967],
...,
[0.6078],
[0.7182],
[0.8251]])
第二期就到这里吧,慢中出细活,多看多练,多理解其中的原理,不做屌爆侠(调包侠),加油~
Reference
- https://github.com/lyhue1991/eat_pytorch_in_20_days
- https://blog.csdn.net/u013230291/article/details/108487877
- https://blog.csdn.net/qq_33590958/article/details/102602029
- https://blog.csdn.net/weixin_43135178/article/details/115139178
- https://blog.csdn.net/tsq292978891/article/details/79414512
- https://pytorch.org/docs/0.3.1/data.html
- https://pytorch.apachecn.org/#/
- https://blog.csdn.net/weixin_42802447/article/details/118394274
- https://blog.csdn.net/qq_24503095/article/details/103683403
- https://blog.csdn.net/qq_42119367/article/details/110004734
- https://blog.csdn.net/qq_38863413/article/details/104108808
- https://blog.csdn.net/weixin_43135178/article/details/115495220
- https://blog.csdn.net/qq_24503095/article/details/103683403
- https://blog.csdn.net/qq_42079689/article/details/102873766
- https://blog.csdn.net/weixin_42495721/article/details/111518564
- https://blog.csdn.net/qq_39938666/article/details/88809726
书籍源码在此:
链接:https://pan.baidu.com/s/1P3WRVTYMpv1DUiK-y9FG3A
提取码:yyds
❤坚持读Paper,坚持做笔记,坚持学习,坚持刷力扣LeetCode❤!!!
坚持刷题!!!
⚡To Be No.1⚡⚡哈哈哈哈
⚡创作不易⚡,过路能❤关注、收藏、点个赞❤三连就最好不过了
ღ( ´・ᴗ・` )
❤