此主要讨论图像处理与分析。虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来。同样,这里面也有一些 也可以划归到计算机视觉中去。这都不重要,只要知道有这么个方法,能为自己 所用,或者从中得到灵感,这就够了。
注意:Registration可翻译为“配准”或“匹配”,一般是图像配准,特征匹配(特征点匹配)。
15. Image Registration
图像配准最早的应用在医学图像上,在图像融合之前需要对图像进行配准。在现在的计算机视觉中,配准也是一个需要理解的概念,比如跟踪,拼接等。在KLT中,也会涉及到配准。这里主要是综述文献。
[1998 MIA] Image matching as a diffusion process: An analogy with Maxwell's demons
[1992 PAMI] A Method for Registration of 3-D shapes
[1992] a survey of image registration techniques
[1996 MIA] Multi-modal volume registration by maximization of mutual information
[1997 IJCV] Alignment by Maximization of Mutual Information
[1998 MIA] A survey of medical image registration
[2003 IVC] Image registration methods a survey
[2003 TMI] Mutual-Information-Based Registration of Medical Survey
[2011 TIP] Hairis registration
若引用文献:Thirion J P . Image matching as a diffusion process: An analogy with Maxwell's demons[J]. Medical Image Analysis, 1998, 2(3).
翻译
图像匹配作为扩散过程:与Maxwell的demons类比——http://tongtianta.site/paper/58305
作者:J.-P. Thirion
http://www.inria.fr/epidaure/personnel/thirion/thirion.html
摘要 -在本文中,我们提出了扩散模型以执行图像到图像匹配的概念。具有两个匹配的图像,主要思想是将一个图像中的对象边界视为半透膜,并通过位于界面内的效应器的作用,使另一图像(被视为可变形网格模型)通过这些界面扩散。膜。我们通过与Maxwell的demons类比来说明这一概念。我们表明,基于吸引力,该概念与更传统的概念有关,中间步骤是光流技术。我们使用扩散模型的概念来推导三种不同的非刚性匹配算法,一种使用静态图像中的所有强度级别,一种仅使用轮廓点,最后一种对已经分割的图像进行操作。最后,我们介绍了合成变形和真实医学图像的结果,并将其应用于心脏运动跟踪和三维患者间匹配。
关键字:变形模型,弹性匹配,图像序列分析,患者间配准,非刚性匹配
1 简介
热力学的许多概念已在信息论领域得到了成功应用,更具体地说,已应用于图像处理。最近的一个例子是互熵最小化技术的应用(见Viola和Wells,1995; Maes等,1997),用于匹配以不同方式获得的医学图像。
另一个有启发性的例子是各向异性过滤(参见Perona和Malik,1990; Catt´e等,1992; Gerig等,1992; Kimia和Siddiqi,1994),现在通常用作医学图像的预处理步骤: 可以看出,参数σ的高斯滤波器的应用等效于均质材料中与σ直接相关的持续时间内的热扩散。 传热是一种看待高斯滤波的新方法:这种概念的变化,例如通过使用图像中的对象边界来创建与传热有关的不均匀性,已经导致了许多新的非线性算法用于 即使并非总是确定收敛证明,也可以进行图像过滤。 各向异性过滤不是一种新技术,而是一种新的令人兴奋的方式来考虑像图像处理这样古老的问题。
扩展了Thirion(1995,1996)中的演示文稿,我们还基于热力学概念的类比,提出了图像到图像匹配的原始观点(见图1)。 具有两个匹配的图像,主要思想是将一个图像中的对象边界视为半透膜,并通过位于膜内的效应子的作用,使另一图像(被视为可变形网格模型)通过这些界面扩散。 我们通过与麦克斯韦魔鬼的类比来说明这个概念,并将其与更传统的观点(例如基于吸引力的可变形模型)进行对比。 正如我们将看到的,扩散模型主要依赖于极性(内部-外部)概念,而吸引力依赖于距离概念,但是可以设计混合模型,并且还将看到如何将扩散模型概念转化为极性模型。 吸引的概念,中间步骤对应于光流方法。
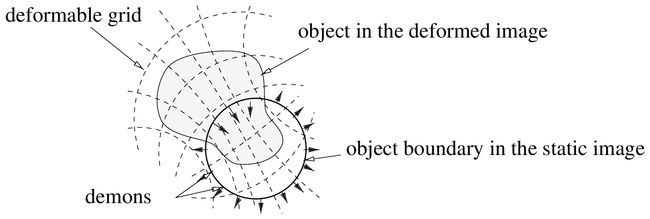
图1.扩散模型:被视为可变形网格的变形图像通过位于这些接口中的称为demons的效应子的作用,扩散通过静态图像中对象的轮廓。
首先,我们回顾一些有关非刚性匹配的现有技术,例如“基于蛇形”的方法,相似度最大化技术和光学流。然后,我们介绍并详细说明我们的扩散模型的概念,当两个相同的光盘严格匹配(守护程序0)时,将其应用于简化情况即可说明。我们提出了一种实现扩散模型的通用迭代方案,其中包含几种可能的变体(守护程序1、2和3),这些变体说明了如何将该概念应用于生成新的匹配算法。最后,我们介绍了几种医学应用的实验结果,例如可变形器官的跟踪或三维(3-D)患者之间的匹配。
2.非刚性匹配技术
匹配是许多计算机视觉应用程序的基本任务。可以对刚性或铰接体给出明确的定义:它是恢复刚性零件的刚性位移。对于具有塑性或弹性变形的可变形物体,该任务要复杂得多。在这种情况下,没有一个理想最佳匹配的定义,而是与实际应用一样多的定义。每次必须精确定义要探索的一组变形T(刚性,细微,样条曲线,自由形式等),以及所使用特征的类型(点,曲线,曲面,强度等)。
但是,实际上,由于该领域最近针对大量不同目标而进行的大量工作,使用单一度量对所有非刚性匹配技术进行分类是不可能的。我们在这里仅描述其中一些方法。
2.1 吸引力的概念
一种广泛(非常直观)的考虑匹配的方法是基于吸引的类比。 一个例子是重力:可变形模型M的一个点P被S中所有相似的点P0吸引。 例如,令K(P,P')为相似性准则,而D(P,P')为距离(不一定是欧几里得)的函数,P上的力![]() 是由P的所有点的吸引引起的 S可以是
是由P的所有点的吸引引起的 S可以是
M根据这些力以及M内部的平滑性约束而变形。这种方法在计算上过于昂贵[O(n2 )]。一种较便宜的方法是在计算中仅保留S的一个主要吸引点:M的一个P点被S的一个点P'吸引,该点与P “最接近,最相似”。
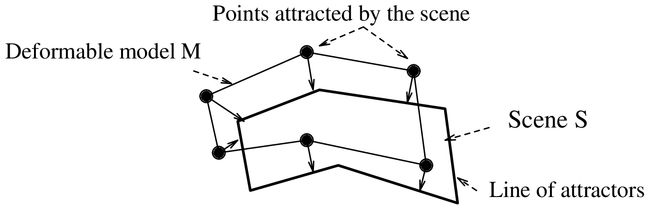
图2.具有吸引力的可变形模型。
我们在此定义中认为,必须确定“亲密”和“相似”之间的平衡。例如,在某些方法中,仅使用轮廓点,而S中的轮廓点与M中的轮廓点同样相似,因此接近度是最重要的因素(请参见图2)。迭代最近点(ICP)方法就是这种情况;有关刚性情况,请参见Besl和McKay(1992)和Zhang(1992)。这也是Kass等人介绍的“蛇形”方法的基本假设。 (1987);有关这些技术的评论,另请参见Blake和Yuille(1992)。
距离和相似性可以优雅地结合在一起。例如,在Feldmar和Ayache(1994)中,这些点具有n个属性(或参数),这些属性是使用微分几何定义的:这些属性是与这些点关联的不变量,例如主曲率。坐标x; y;z点也被视为参数,因此S的每个点由(n+3)维参数空间中的单个点表示,其中空间坐标和微分不变量混合在一起。然后,仅需要距离,就像在ICP中一样,但是在(n+3) D 参数空间中:它可以是欧几里得距离,或者如果还评估不确定性,则可以是马氏距离(参见Ayache,1991)。
相似性也可以引入基于蛇的技术中。例如,在Benayoun和Ayache(1995)中,将第三项添加到要最小化的能量函数中,这对应于附加到这些点的微分几何特性的相似性。这有助于减少众所周知的“孔径问题”(参见Faugeras,1993),该问题指出,恢复与轮廓垂直而不是沿轮廓的位移更容易。
与ICP或蛇形相比,关联技术更重视相似性而不是距离。 M的点P被S的P'吸引,这使相关函数K(P,P')最大化。 但是也使用距离,如果P'在Ti(P)附近(其中Ti是当前估计的变形),则距离为1;如果P'在相关窗口之外,则距离为+∞。
如所描述的,这些方法仍然是昂贵的,因为在每次迭代中并且对于每个P,要考虑S中的大量可能的吸引力点P'。在实践中,有一些算法解决方案可以降低找到“最接近和最相似”点的复杂性。它可以用作KD树,例如Besl和McKay(1992)或Feldmar和Ayache(1994)。可以通过减少特征点集来实现,例如使用器官表面(请参见Davatzikos,1996; Thompson和Toga,1996),或者使用更紧凑的表示形式,例如波峰线(请参见Declerck等人,1995)或单个点(参见Thirion,1994; Rohr等,1996)。它可以用于预先计算的距离图,例如用于倒角匹配技术(参见Borgefors,1988; Malandain等,1994)。
一个吸引点也可以看作是一个潜在场的最小(“吸引者”):通过区分这个潜在场,可以得到力的局部表达。可以对蛇进行此操作[例如使用渐变,请参见Kichenassamy等。 (1995)],并且也用于相关技术。这些差异给出的力很可能指向“最接近的相似点”,但这只是局部的近似值。
如我们所见,吸引力的概念启发了大多数现有的匹配方法。距离和相似性是吸引的中心,而极性是辅助的且很少使用。但是,我们注意到在Radeva等人中有一些利用极性的著作。 (1995)极性用于丢弃轮廓的力,其法线指向远离其最近点的方向。在Chakraborty等人的工作中。 (1996年),区域信息以第三项的形式被使用,应与内,外力一起被最小化。第三项对应于点的模型内部的积分,这些积分不太可能是内部点。可以参考Ronfard(1994)的工作,该方法主要基于极性:稍后我们将详细讨论最后一种方法。
2.2 光学流方法
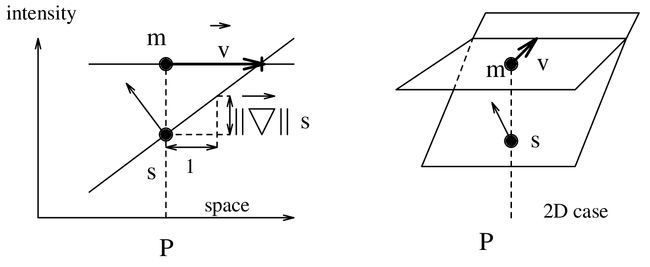
图3.从图像M到图像S的瞬时速度。
光学流是一种特殊的方法,用于发现图像时间序列中的小变形(参见Horn和Schunck,1981; Aggarwal和Nandhakumar,1988; Barron等,1994)。在给定的点P处,令s为S中的强度函数,m为M中的强度(见图3)。光学流的基本假设是认为运动物体的强度随时间恒定,这对于小位移给出了光学流方程![]()
该约束条件不足以定义速度![]() 。 参见例如Simoncelli等人(1991)。 一种解决方案是对问题进行正则化以获得
。 参见例如Simoncelli等人(1991)。 一种解决方案是对问题进行正则化以获得![]() 的局部值。另一种解决方案是针对空间(x,y,z)平移,考虑
的局部值。另一种解决方案是针对空间(x,y,z)平移,考虑![]() 的端点是超曲面m的最近点。(请参见图3),得出等式(3):
的端点是超曲面m的最近点。(请参见图3),得出等式(3):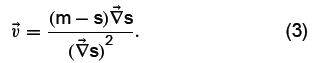
对于![]() 的较小值,该方程不稳定,从而导致
的较小值,该方程不稳定,从而导致![]() 的值无限。理想情况下,对于
的值无限。理想情况下,对于![]() 较小的表达式应接近零。 一种解决方案是将公式(3)乘以
较小的表达式应接近零。 一种解决方案是将公式(3)乘以![]() ,得出公式(4):
,得出公式(4):
![]() 利用该表达式,可以分两个步骤计算光流:首先计算S中每个点的瞬时光流,然后对变形场进行正则化。
利用该表达式,可以分两个步骤计算光流:首先计算S中每个点的瞬时光流,然后对变形场进行正则化。
在光流中,将![]() 视为速度,因为图像是两个连续的时间帧:
视为速度,因为图像是两个连续的时间帧:![]() 是两个图像帧之间的时间间隔内的位移。 实际上,当比较两个不同患者的图像时,没有这种时间上的考虑,更普遍的是将v视为简单的位移。
是两个图像帧之间的时间间隔内的位移。 实际上,当比较两个不同患者的图像时,没有这种时间上的考虑,更普遍的是将v视为简单的位移。
3.扩散模型
现在,我们提出扩散模型的概念,并与Maxwell的魔鬼相提并论。
3.1 Maxwell的魔鬼

图4.麦克斯韦的demons和混合气体。
Maxwell在19世纪引入了魔鬼的概念,以说明热力学的悖论(见图4)。假设气体由两种类型的粒子a和ba的混合物组成,并被半透膜分隔。还假设该膜包含一组“demons”,它们能够区分两种类型的粒子,并允许类型a的粒子仅扩散到膜的A侧,类型b的粒子仅扩散到膜的A侧。另一边B.最后,A仅包含粒子a,而B粒子b。
a最初,a和b是冷热颗粒。
这与熵的减少相对应,这与热力学的第二原理相反。之所以解决了这一矛盾,是因为demons产生了更多的熵来识别粒子。因此,系统的总熵增加了。
3.2 用于图像处理的demons
让我们看看如何将demons应用于图像匹配。我们希望将模型图像M与场景图像S相匹配:M必须变形为尽可能类似于S。我们假设(再次参见图1)S中的对象O的轮廓是膜,并且我们沿着该轮廓分散了魔鬼。我们还假设,对于S中的每个轮廓点,我们都可以局部确定一个垂直于该轮廓并从对象内部到外部定向的矢量(例如,可以使用图像S的梯度)。我们还假设M是一个可变形的网格,其顶点是可以分为“内部”或“外部”粒子的粒子。可变形格栅M的刚度由这些颗粒之间的关系决定,并且通过改变这些关系,可以获得从完全刚性到完全自由形式的不同行为。稍后我们将看到可以使用多种类型的变形。我们称M为扩散模型,并为魔鬼提供非正式定义:
demons是位于对象O边界P点的效应器。如果将M的对应点标记为“内部”,则将模型M局部推入O内,如果将M的对应点标记为“外部”,则将其推向O外部。
极性(内-外)是扩散模型的中心,距离是可选的。
3.3 扩散模型:一个简化的示例

图5.基于吸引力的模型的三个迭代(顶部行)和刚性扩散模型(底部的行)。这些示例是由实际实现产生的。
为了说明此原理,我们考虑了两个图像显示同一张光盘的简单情况,并且将自己限制为刚性变换。考虑到吸引和扩散模型的概念,我们考虑如何解决此问题(见图5)。
·为了吸引,很自然地要定期采样模型盘的边界(就像在基于蛇的技术中一样),并施加指向包含吸引力点的场景圆最近点的力:距离是中心。
·对于扩散模型,我们定期对场景光盘边界进行采样,每个点都是一个demons。如果相应的模型点标记为“外部”,则魔鬼的力从光盘的内部朝向外部,而如果标记为“内部”,则demons的力为反方向:极性为中心。
两种方法都是迭代的:在每次迭代中,由所有基本力创建的运动都将应用于模型。再次为了简化比较,在每次迭代中,由demons和引诱点引起的力大小是恒定且相等的,但是随着每次迭代而减小,以允许收敛。
在图5中,最上面的三个图像表示使用引力的三个迭代,而下面的三个图像是使用扩散模型的三个迭代。我们可以看到两种方法之间的个体力明显不同,这不是由于参考系统的变化,因为转换是刚性的。图6展示了吸引点(顶部)和扩散(底部)的下三个迭代。两种方法收敛到相似的结果(但并非总是如此),并且对于较小的变形,作用力也变得相似。
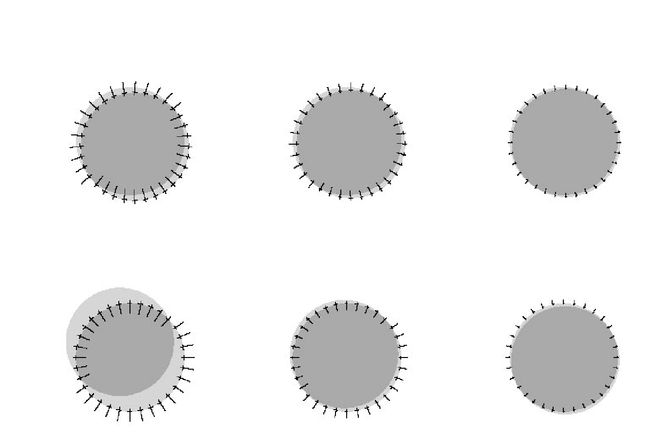
图6.接下来的三个迭代(最上面一行,引人注意的点;最下面一行,demons)。
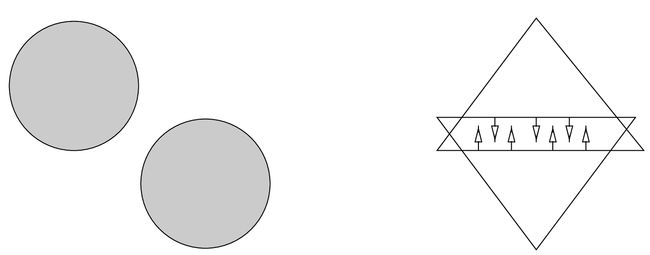
图7.初始化有问题的示例:左图,当两个要匹配的对象不重叠时,扩散模型效率不高。是的,如果没有考虑极性的吸引力模型,并且力随着距离的增加而减小,则该模型可能会陷入局部最小值。
我们注意到,如果最初两个光盘没有重叠,则基于demons的方法将不适用,而吸引仍然有效,但是还有其他一些示例,其中吸引模型可能会陷入局部极小值(参见图7)。扩散模型仍然可以提供预期的解决方案。
值得注意的是,仅基于极性的模型可以导致匹配。
3.4 相关工作

图8.demons概念的两种不同用法。左图,在“预期蛇”中进行图像分割;右,在扩散模型中,用于执行图像到图像的匹配。
从我们考虑过的所有方法中,其精神上最接近的作品可能是Ronfard(1994)的“预期蛇”,用于二维(2-D)图像分割(请参见图8)。该方法的原理是考虑一个可变形的轮廓,其中外力主要由极性决定,以“基于区域的”力代替,并且完全适合我们对demons的定义。不过,预期蛇与扩散模型不同,主要是因为Ronfard(1994)中考虑的是在静态图像中演化的可变形轮廓,而不是在静态轮廓中扩散的可变形图像网格。一个明显的结果是,在我们的方法中,力被施加到Ronfard(1994)的可变形轮廓上,并施加到了可变形的网格上。沿着迭代,在扩散模型中,外力也总是施加在预期蛇的可变形轮廓的相同位置,而外力则施加在扩散模型中的可变形网格的连续位置。
关于医学应用,最相关的著作是Bajcsy和Kovacic(1989),Gee等。 (1993)或Christensen等。 (1994b),其中被视为2-D或3-D网格的全局图像也在变形。在这些方法中,施加在网格上的外力是传统的,例如基于互相关相似性度量的导数。
在我们看来,可以从扩散模型的角度研究后一种方法,尽管我们仍不清楚如何去做。但是,我们能够证明,在某种程度上,光学流可以看作是扩散模型与吸引之间的中间概念。
3.4.1 光流表现得像扩散模型
贯穿场景图像S的每个点P,其中![]() 是等高线s = I,其中I = s(P)是常数。 该等高线是内部区域s
是等高线s = I,其中I = s(P)是常数。 该等高线是内部区域s
位移![]() [等式(4)]与一个迭代步骤中的基本力
[等式(4)]与一个迭代步骤中的基本力![]() 的施加相当,其方向按照-
的施加相当,其方向按照-![]() b与
b与![]() 相同,并且如果m
相同,并且如果m ![]() 。 换句话说,当P标记为外侧(m> I)时,力f将M的点P推向外侧(即
。 换句话说,当P标记为外侧(m> I)时,力f将M的点P推向外侧(即![]() ),而当P标记为内侧时将力推向内侧(即-
),而当P标记为内侧时将力推向内侧(即-![]() )( m
)( m
3.4.2 光流的行为也类似于基于吸引力的可变形模型
再次考虑图3:![]() 是最短的空间位移,它将与M对应的超曲面的点[P,m(P)]带入通过[P,s(P)]的超平面,且法线(-
是最短的空间位移,它将与M对应的超曲面的点[P,m(P)]带入通过[P,s(P)]的超平面,且法线(- ![]() ,1),这是超曲面S的最佳局部逼近。如果只有局部信息可用[即m(P),s(P)和
,1),这是超曲面S的最佳局部逼近。如果只有局部信息可用[即m(P),s(P)和![]() (P)],则可以假定P'= P +
(P)],则可以假定P'= P + ![]() 是S的最接近P的点,并且具有相同的强度[m(P)]:P'是S的最接近点,其强度与M中的P相同,这根据定义是吸引点的行为 。
是S的最接近P的点,并且具有相同的强度[m(P)]:P'是S的最接近点,其强度与M中的P相同,这根据定义是吸引点的行为 。
4.从扩散模型的概念得出的实现
我们提出了一种具有几种可能的变体的通用方案,从而导致了扩散模型的不同实现。
4.1 匹配是一个迭代过程
与基于吸引力的可变形模型相似,扩散模型需要迭代方案。 目的是在模型图像M的空间![]() 和场景图像S的空间
和场景图像S的空间![]() 之间找到最终变换T∈
之间找到最终变换T∈![]() (其中
(其中![]() 是允许变形的集合)。T是的族的最终演化。 转换{T0,T1,..... Ti,...} <
是允许变形的集合)。T是的族的最终演化。 转换{T0,T1,..... Ti,...} <![]() 。
。
在每个步骤中,模型M的变形版本Ti(M)变为Ti+1(M),受到模型点之间的关系所产生的“内部”力fint和相互作用所产生的“外部”力fext的约束 我们还可以在M和T¡(S)之间的相互作用中更改参考系和过程。
在每个步骤中,模型M的变形版本Ti(M)变为Ti+1(M),受模型点之间的关系所产生的“内部”力fint约束,而Ti(M)和S之间的相互作用所产生的“外部”力fext约束。 我们还可以更改![]() 中的参考系统和过程,使M和T¡-1(S)之间的相互作用。
中的参考系统和过程,使M和T¡-1(S)之间的相互作用。
前面描述的两个简化示例(扩散模型和吸引力)都说明了一种迭代方案:在这些情况下,![]() 是刚性变换的组,Ti+1是
是刚性变换的组,Ti+1是![]() ,其中
,其中![]() 是由一组基本demons或吸引力产生的残余运动。
是由一组基本demons或吸引力产生的残余运动。
在扩散模型的情况下,第一步是对从S提取的demons集合Ds进行预计算,第二步是从模型空间![]() 到场景空间
到场景空间![]() 的变形T的迭代估计(图9)。
的变形T的迭代估计(图9)。
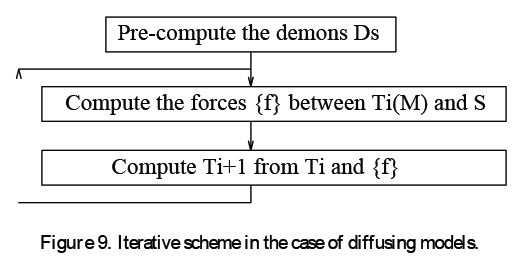
图9.扩散模型的迭代方案。
4.2 从S中提取demons
demons集Ds是从场景图像S中提取的。Ds可以是整个图像网格(每个像素或体素一个demons),例如在Thirion(1995)中:在这种情况下,每个点的接口都是等值线 。 也可以将Ds限制为S中的轮廓点,例如在简化示例中(demons0),或者限制为通过边缘检测方法自动提取的点。 每个demons附带的信息可以是:
·它在![]() 中的空间位置P(可能是子像素);
中的空间位置P(可能是子像素);
·从内部到外部的方向![]() [通常基于梯度
[通常基于梯度![]() (P)];
(P)];
·在该点上从S到M的当前位移:![]() =
= ![]() ,其中P'=
,其中P'= ![]() ;
;
·有关界面的信息,例如该位置s(P)的强度。
4.3 迭代部分
我们从初始变形T0(即同一性)开始。 在迭代i处,我们有一个当前的估计变换Ti,并且每个迭代都由两个步骤组成:
(i)对于每个demonsP∈Ds,计算相关的基本demons力![]() ,这取决于点P上的demons方向
,这取决于点P上的demons方向![]() 和点
和点![]() 上的M极性。
上的M极性。
(ii)从Ti和所有基本魔鬼力量{![]() }计算Ti+1。
}计算Ti+1。
在某些情况下,步骤(ii)可分解为两个步骤:首先根据基本力![]() 计算基本变形
计算基本变形![]() ,然后计算Ti+1=
,然后计算Ti+1=![]() 。
。
4.4 可能的变体
可以通过以下方式获得上述方案的有用变体
变化:
(i)选择demons位置Ds(整个图像网格,轮廓点等)。
(ii)变形空间![]() (刚性,仿射,样条,自由形式等)。
(刚性,仿射,样条,自由形式等)。
(iii)内插法,它给出非整数位置![]() (线性,样条,sinc等)的M值。
(线性,样条,sinc等)的M值。
(iv)给出demons力![]() 的公式(恒定大小,基于梯度,类似光流等)。
的公式(恒定大小,基于梯度,类似光流等)。
因此,简化的扩散模型示例(守护程序0)使用:(i)Ds的S的圆盘轮廓的采样点; (ii)![]() 的刚性变换; (iii)因为m(
的刚性变换; (iii)因为m(![]() )被解析定义,所以没有插值;(iv)幅度恒定的力。 在下面,除了简化的情况外,我们还将检查扩散模型的其他三个示例,这些示例说明了通用方案的不同变体。
)被解析定义,所以没有插值;(iv)幅度恒定的力。 在下面,除了简化的情况外,我们还将检查扩散模型的其他三个示例,这些示例说明了通用方案的不同变体。
4.5 demons1:完整的demons网格
以下方法特别适用于3-D医学图像分析(请参阅Thirion,1995)。 通用方案修改如下。
(i)选择![]() 的S的所有像素为demons(Ds = S)。
的S的所有像素为demons(Ds = S)。
(ii)![]() 是自由形式的变形,也就是说,对于每个demonsP,我们都存储当前的基本位移
是自由形式的变形,也就是说,对于每个demonsP,我们都存储当前的基本位移![]() (P)。 为了获得规则的位移场,在每次迭代时将具有给定σ的高斯滤波器应用于整个场。 关于如何使用平滑变形场进行正则化的理论研究可以在Anandan(1989)中找到。
(P)。 为了获得规则的位移场,在每次迭代时将具有给定σ的高斯滤波器应用于整个场。 关于如何使用平滑变形场进行正则化的理论研究可以在Anandan(1989)中找到。
(iii)m(P'),其中P'= P + d(P)是使用M中的三线性插值估算的。
(iv)利用光流[等式(4)的![]() ],仅使用每个点所提供的信息:m(P'), s(P)和
],仅使用每个点所提供的信息:m(P'), s(P)和![]() (P)来给出demons力。 更确切地说,我们不定义力,而是定义一个迭代步骤中施加力的结果,即位移:
(P)来给出demons力。 更确切地说,我们不定义力,而是定义一个迭代步骤中施加力的结果,即位移:![]() = -
= -![]() 。
。
为了使算法更快(在每次迭代中都考虑每个体素)并且相对于初始位置更鲁棒,我们采用了多尺度方案,从粗略的大量迭代开始,直到最细的几次迭代规模。更准确地说,我们使用金字塔方法,在每个尺度上使用1/8个体素,并且使用的迭代次数是立即数尺度中的四倍,这意味着金字塔其余部分的计算时间等于在最大规模上花费的时间。
这使我们的结果在质量上与其他可变形网格方法(例如Bajcsy和Kovacic(1989)或Christensen等人)相似。 (1994b)。但是,很难评估数量上的差异,首先,因为“理想的”患者之间匹配的定义仍然有待解释(见Thirion等,1996)。
关于计算时间,与Christensen等人描述的结果相比,我们的方法特别省时。 (1996年)使用大型并行计算机。除了找到相似点的计算方面外,Christensen(1994b,1996)提出的方法在计算上也很昂贵,因为它可以精确地模拟粘性流体的物理行为。Bro-Nielsen和Gramkow(1996)(在二维中)表明,可以使用应用于变形场的卷积滤波器实现这些计算,从而将速度提高一个数量级。另一个有趣的结果是,他们从理论上证明了在我们的方法中用来规范变形场的高斯滤波近似于线性弹性。
算法demons1可能也从光学流概念派生而来:在某种程度上,demons1可被视为一种特殊的多尺度迭代形式的光学流。我们从扩散模型中得出,该模型强调了如何将光学流视为扩散过程。这揭示了算法中的可能变化,例如力的表达式(请参见下面的demons2和3),这些变化与光学流方程的关系越来越小。但是,我们注意到,对于魔鬼使用光学流公式,对于上一节中介绍的实验会产生特别好的结果。
4.6 demons2:仅在轮廓中的demons
在匹配方法中,轮廓点通常比图像中的其他点更重要。 此外,仅使用S的轮廓点将导致更快的算法。 我们使用了可能的变体:
(i)Canny-Deriche边缘检测器(见Deriche,1986; Monga等,1990),从S中提取Ds;
(ii)![]() 的全局变换(刚性,仿射),由最小二乘法确定(例如Besl和McKay(1992))。 可以通过扩展卡尔曼滤波(EKF;参见Ayache,1991)改进以排除异常值。 我们还使用翘曲技术测试了更灵活的变形(请参见Bookstein和Green,1993; Szeliski和Lavalléee,1994; Szeliski和Coughlan,1994; Declerck等人,1995),这些变形将在不规则分布点Ds上定义的变形扩展到 整个图像S;
的全局变换(刚性,仿射),由最小二乘法确定(例如Besl和McKay(1992))。 可以通过扩展卡尔曼滤波(EKF;参见Ayache,1991)改进以排除异常值。 我们还使用翘曲技术测试了更灵活的变形(请参见Bookstein和Green,1993; Szeliski和Lavalléee,1994; Szeliski和Coughlan,1994; Declerck等人,1995),这些变形将在不规则分布点Ds上定义的变形扩展到 整个图像S;
(iii)(三)线性插值;
(iv)demons的行为详述如下。
现在我们描述这种情况下的demons力计算。 由于仅考虑了S的子集Ds,因此可以设计比基于光流公式的先前方法更复杂的demons。 设P为S中强度为s(P)的轮廓点,![]() 为轮廓的法线方向(从内到外)。 通过插值,我们计算出值
为轮廓的法线方向(从内到外)。 通过插值,我们计算出值![]() 和
和![]() (其中k为常数,可能为1)。
(其中k为常数,可能为1)。
因此,P是估计强度为sin的区域与强度为sout的区域之间的界面。 demons的力量是![]()
其中P'=![]() 和Ksin,sout(m)是我们现在详述的函数。 根据定义,当P' 在M中标记为“内部”时,demons向内(K <0)推入,而当P'在M中标记为“外部”时,demons向内推(K> 0)。
和Ksin,sout(m)是我们现在详述的函数。 根据定义,当P' 在M中标记为“内部”时,demons向内(K <0)推入,而当P'在M中标记为“外部”时,demons向内推(K> 0)。
我们考虑过函数K,如果![]() (那么我们施加K = -k),那么在“内部”的概率非常高,而在“外部”的概率非常高
(那么我们施加K = -k),那么在“内部”的概率非常高,而在“外部”的概率非常高![]() (则K = k)。 我们对K(m)使用了图10的简单分段线性公式。
(则K = k)。 我们对K(m)使用了图10的简单分段线性公式。
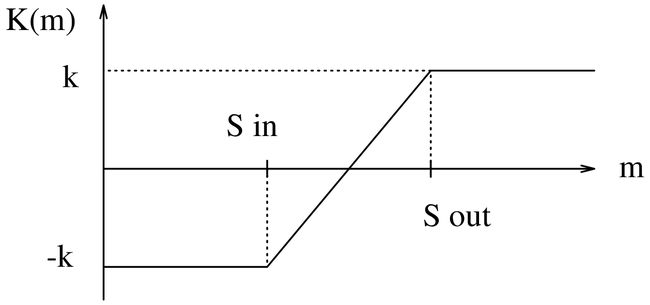
图10.第一种K函数。
我们考虑了另一种函数K,其中当m与sin和sout相差太大时,P既不被认为是“内部”也不是“外部”,而仅仅是“无关”(K = 0)。 我们假设内部点的强度为sin,外部点的强度为sout,但是度量s被高斯噪声破坏。 因此,对于K,我们使用两个高斯分布的总和K = K- + K+(见图11)。 K-(m)为负,以sin为中心,K-(sin)= -k,K+(m)为正,以sout为中心,K+(sout)= k。
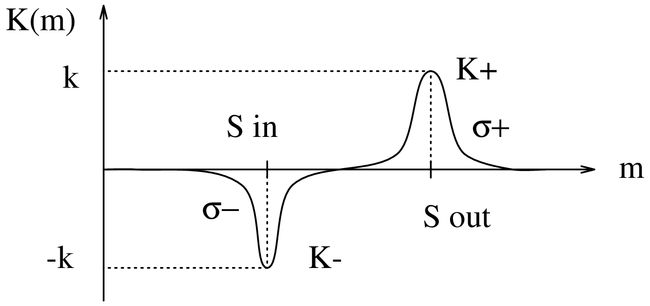
图11.第二种K函数。
我们仍然有两个自由参数(σ-和σ+),它们与图像S和M中的噪声水平有关。引言中提到的各向异性扩散滤镜可以有效地预处理S和M并降低 噪声水平,同时保留接口。 所描述的两个K(m)函数都给了我们很好的结果,在本文中,我们保留了第一个函数进行实验,但是需要更仔细的研究以确定何时使用另一个函数。
4.7 demons3:已经分割的图像
在这里,问题的性质是不同的。 我们假定图像S和M已经被分割,也就是说,对于图像S或图像M中的每个点,我们都有一个标签,该标签指向给定的结构(例如,医学图像中的给定器官)。 即使对图像进行了分割,我们仍然可以搜索S和M之间的几何点对点对应关系。在一般方案中,我们使用:
(i)Ds的S的界面点集,即标签不同的相邻体素之间的点(图12);
(ii)类似于方法2的变形(刚性,仿射,翘曲);
(iii)没有插值,但是M中最接近的体素的标签(在标签之间使用线性插值通常是没有意义的);
(iv)具有恒定大小力的demons,其方向根据标签定义(见下文)。
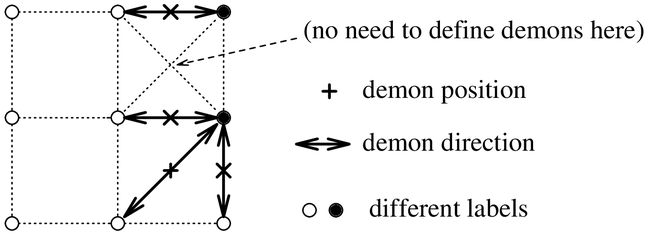
图12.标记图像中的demons。
现在,我们详细介绍demons的行为。 两个相邻的体素通过长度为1,√2,√3的段链接,具体取决于它们的连接性(6、18、26)(请参见图12)。 假设A和B是两个相邻的体素,它们的标签sin = s(A)和sout = s(B)不同,并且![]() 。 我们在P =(A + B)/ 2中创建一个demons。
。 我们在P =(A + B)/ 2中创建一个demons。
demons的“力”![]() (P)由sin,sou和标签m(P')决定,其中P'=
(P)由sin,sou和标签m(P')决定,其中P'=![]() ,然后
,然后
对于给定的迭代,k是一个恒定的大小,它可以根据收敛策略在每次迭代中变化。例如,可以将k设置为k0体素大小,并在迭代过程中线性减小为零。因此,可以将平滑参数σ从σ0减小为0,以确保算法的收敛性。比率k0/σ0取决于应用程序:它控制扩散模型的刚度。使用预先分割的图像的优点是将界面点标记为(sin, sout ),并与M的结构(sin或sout)相互作用,但根本不与其他结构相互作用。
对于通过数字解剖图谱自动注册,这种方法非常适合:医师可以花费大量时间标记参考患者图像S中的所有体素(请参见图26),然后是使用混合demons的方法可以应用图2和3的方法来自动匹配并同时标记新患者的图像M。
4.8 3-D变形的“双射性”
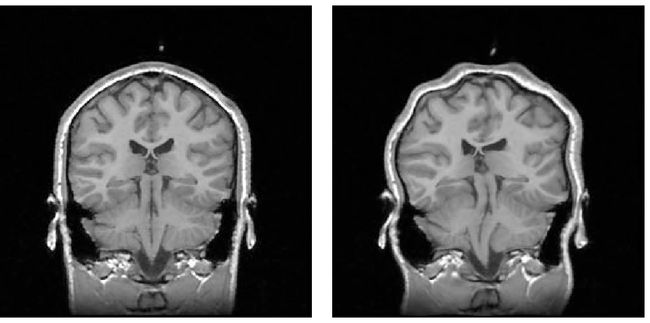
图13. MR头部切片:原始(左),变形(右)。
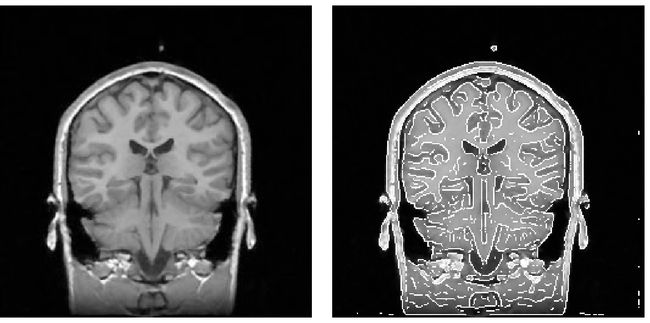
图14.用demons1校正的变形(左),原始图像的轮廓被叠加(右)。
在离散形变场的情况下,我们不讨论双射性是什么意思,但是3-D形变的一个重要限制是反转这些形变的可能性。 使用前面描述的实现方式,不能保证可以执行此反演[Bro-Nielsen和Gramkow(1996)提出了一个问题]。 在基于物理的技术中(例如Christensen等人的技术)在某种程度上确保了双射性。 (1994a)或Bro-Nielsen和Gramkow(1996)]通过雅可比行列式(变形的雅可比行列式的行列式| J |)的局部控制得到强迫(| J |> 0)。 这类双射性不应与粘性流体的“一对一”对应相混淆(参见Christensen等,1996),对应于不可压缩物质(| J | = 1),这对于特定类型的问题可能有用。
然而,尽管没有理由将这两种力学模型与解剖学差异联系起来,但是弹性流体a对于患者之间的匹配而言可能是比粘性流体更好的模型。 在以下应用中,我们将主要关注弹性变形。
a首先,两名患者可能有不同的体型。
保持约束使得| J | > 0(弹性)也很耗时。为了简单地验证离散的3D变形场具有正的Jacobian值,可以考虑由8个体素组成的每个立方像元(或8个像元),并验证变形的8个像元仍然是正向的。一种方法是将8单元分解为五个四面体,并验证变形的四面体仍为正向(通过计算由三个边形成的矩阵的行列式),这意味着每个体素大约有100个浮点运算以及每次迭代,这将使该测量成为我们方法的瓶颈,甚至没有解决问题(即强加一个雅可比矩阵)。
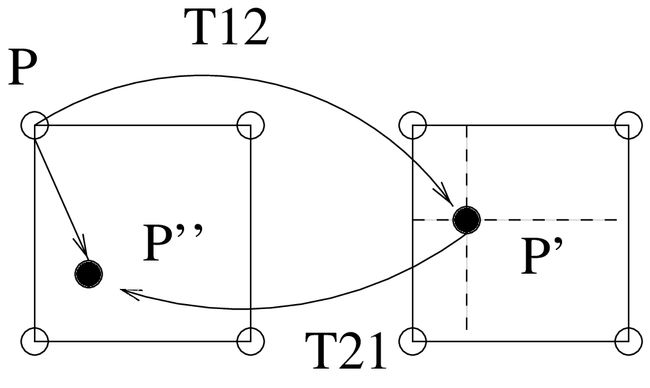
图15.通过计算![]() 以及在扩散模型的每次迭代中残差的重新分布来保持双射性。
以及在扩散模型的每次迭代中残差的重新分布来保持双射性。
我们实现了一个更简单的解决方案(另请参见Burr,1981年):在每次迭代中,我们计算直接变形T12(对于I1中的规则网格,从I1到I2),以及反向变形T21(对于I1到I2,从I2到I1),I2中的规则网格),以及残余变形![]() 。然后,我们通过从每个变形中去除R的“一半”,来平均补偿T12和T21中的残余变形。更准确地说(图15),图像I1中的点P被投影到I2中的P'= T12(P),并且通过在浮点位置P'内插T21,重新投影回P'= T21(P') 。因此,残差矢量PP'构成了I1中规则网格的矢量场。直接从矢量场T12中减去1 / 2PP',另一半1 / 2PP'通过使用T21投影到I2中并相加,得到一个新的T21。在此操作之后,
。然后,我们通过从每个变形中去除R的“一半”,来平均补偿T12和T21中的残余变形。更准确地说(图15),图像I1中的点P被投影到I2中的P'= T12(P),并且通过在浮点位置P'内插T21,重新投影回P'= T21(P') 。因此,残差矢量PP'构成了I1中规则网格的矢量场。直接从矢量场T12中减去1 / 2PP',另一半1 / 2PP'通过使用T21投影到I2中并相加,得到一个新的T21。在此操作之后,![]() 非常接近于同一性,并且我们已通过实验验证,当在扩散模型的每次迭代中执行此操作时,该残差平均小于体素。
非常接近于同一性,并且我们已通过实验验证,当在扩散模型的每次迭代中执行此操作时,该残差平均小于体素。
此方法只需要单向变换的计算的两倍,并且每次迭代每个体素仅需要大约20个其他浮点运算。 除了双射性,此方法的优势在于,它不仅提供直接变换T12,而且还提供与“理想” T12-1非常相似的逆变换T21。
实验证明,这种双射的实现比简单的解剖同源器官(例如右手各有五个手指)的鲁棒性强。它倾向于保留每个标本的形态。例如,在大脑的颞叶中,不同患者的回旋数可以不同,但仍可以保留:只有低频形态学差异得到补偿,这可以比较局部形态学差异(参见Guimond等,1997年)。
4.9 部分结论
在某种程度上,扩散模型(主要是demons1)可以与更经典的匹配概念联系起来。但是,该概念可以通过许多可能的选择来促进对新匹配算法的探索。扩散模型不限于使用从已知势场或相似性度量得出的力;该概念提供了对事物工作方式的全局理解:可变形模型通过场景界面扩散,以使模型的更多点具有与场景中相应位置相似的极性或类型。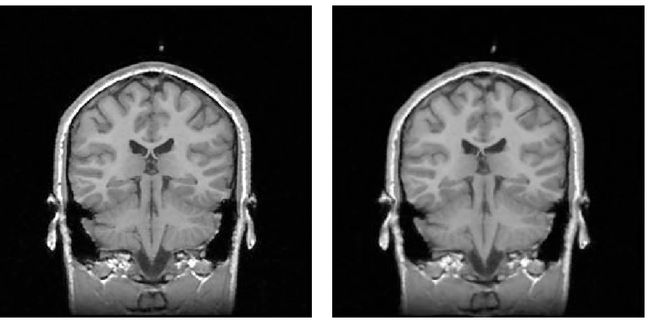
图16.原件(左),用demons2校正(右)。
5.实验
现在,我们使用合成的和真实的数据,介绍了使用扩散模型的实现1和2获得的非刚性匹配的一些实验结果。我们在所有实验中都使用了相同的参数集: σ=1用于高斯滤波,在金字塔的精细级进行四个迭代,以及针对多级处理的四个分辨率级别。
5.1 模拟变形的实验
首先,我们介绍了二维合成变形的一些结果。图13显示了来自磁共振(MR)脑图像的典型切片,以及基于正弦函数的变形(具有32个体素的空间周期)后的同一图像。
我们应用了demons1来获得图14的图像(CPU时间为30 s),其中我们还叠加了原始图像的轮廓以直观地验证匹配的质量,与较大量的图像相比变形。
我们还成功地在此图像上测试了demons2(具有变形)(请参见图16)。比赛的质量也不错,但不及魔鬼1令人满意。相差很小。
二维计算时间仅为9 s(快三倍,包括边缘提取)。这是我们实验的一般结果:demons2比demons1更快,但准确性更低,因为demons2的密度降低了。质量上的差异通常在体素大小的数量级上。方法的选择取决于质量和计算时间之间的折衷:本质上没有哪个更好。
最后,我们使用扭曲变形对实施demons3进行了测试。在该实验中,仅考虑已经标记的图像(忽略了灰度图像,请参见图17)。这表明极性(或标记)足以成功地完成两个图像的非刚性匹配。
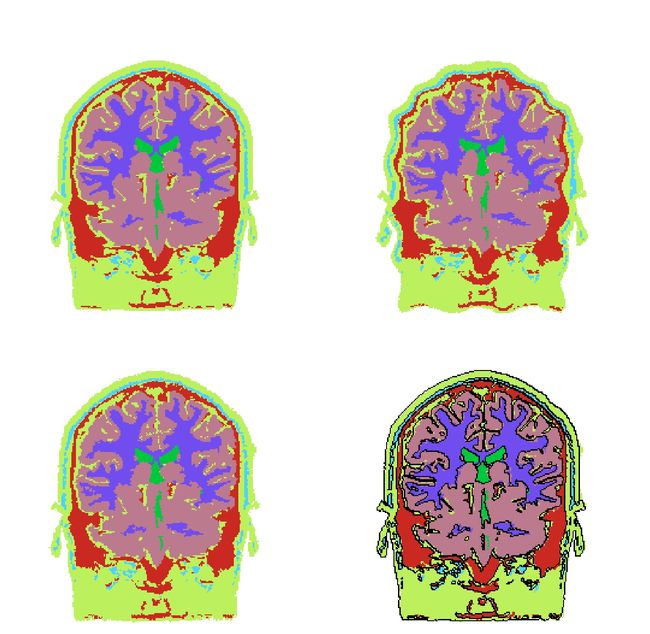
图17.左上方的原始标签图像(I1);右上角,变形的标签图像(I2)。左下方,使用“ demons 3”实现,I2向I1变形;右下角,变形的I2与I1轮廓的叠加。
5.2 显示心脏运动的3D图像序列
对于图像序列分析,减少了非刚性匹配的两个主要缺点:采集设备相同,扫描对象的强度在帧与帧之间变化不大,并且对象在一帧中的位置很好 初始化下一个。
已经提出了许多可变形的表面技术来研究心脏序列,例如在Bardinet等人中。 (1994年),其中参数曲面拟合数据,并使用模态分解分析变形。Shi等人发现了有关表面变形模型与心脏运动分析的相关性的非常有趣的研究。 (1995),基于与狗的临床实验。然而,这些技术需要对物体表面进行分割,并且将变形扩展到整个体积的问题仍然有待解决。
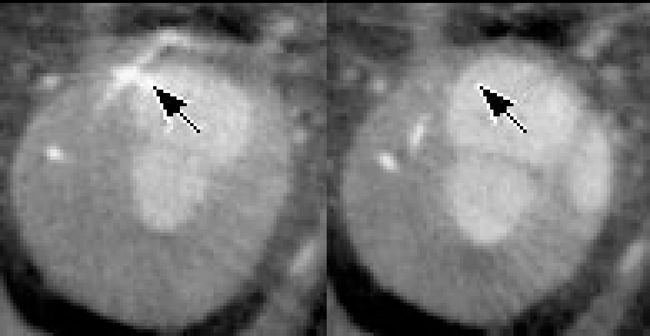
图18.匹配之前对应的舒张和收缩片(狗)。
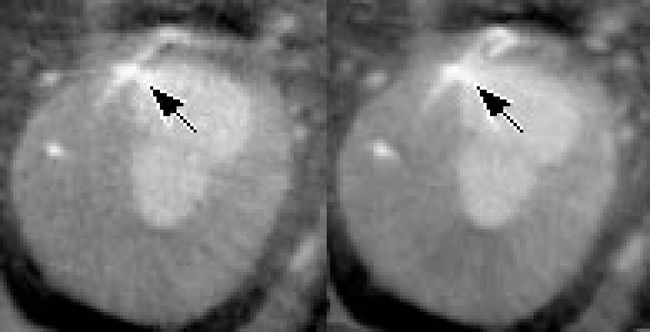
图19. 3-D匹配和重新采样后相应的舒张和收缩片。
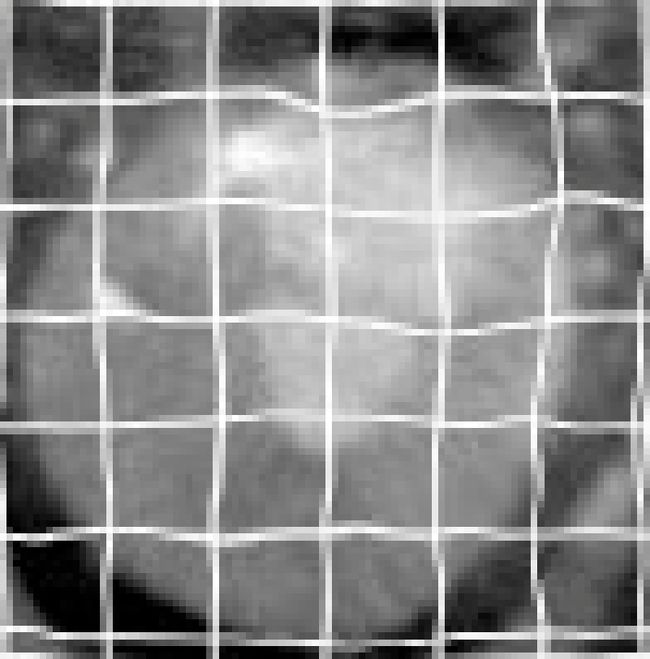
图20.人工标记的图像(平面的二维网格)显示了三维变形。
在下面的实验中,我们提供了使用Mayo Clinic DSR(由Richard Robb博士提供)获得的狗的心跳CT扫描分析示例。为了考虑极端条件,我们直接匹配舒张期和收缩期的3D图像。在图18中,我们展示了弹性匹配之前的两个对应片段,在图19中,我们展示了3D匹配和重采样之后的相同片段。使用3-D工具,我们可以在视觉上验证卷中所有其他部分的匹配质量。为了了解非刚性变换的平滑度,我们在变形前人工向图像添加了规则的网格标签(参见图20)。在DEC alpha工作站上,用于匹配两个1003体素图像的计算时间约为5分钟。

图21.匹配之前对应的舒张和收缩切片(SPECT,人类)。

图22. 3-D匹配和重新采样(SPECT,人类)后相应的舒张和收缩片。

图23. SPECT图像中心脏左心室的3-D可视化。左为舒张期,中为收缩期,右为通过demons1获得的3-D矢量场向舒张变形的舒张表面。
图21和22显示了对核医学643 SPECT图像(人的心脏)的类似实验,其CPU时间约为1分钟。图23是相同结果的3D可视化。
我们还分析了整个心脏门控序列(整个心脏周期的8个3-D图像)。根据SPECT采集的物理原理,我们增加了两个约束:序列的周期性,这是由另一组迭代将整个序列考虑在内并进行时间滤波而施加的,以及放射性物质的守恒。最后一个约束条件指出,当心肌收缩时,放射性物质的密度增加,因此图像强度相应增强。通过将m(Pi)乘以表示密度局部变化的雅可比行列式,可以很容易地在demons的设计中对其建模。整个时间序列的分析仅需约10分钟。
总而言之,我们有一个自动,快速的算法来估计3D图像序列中帧之间的变形场,而不必对物体进行分割,这对于SPECT图像是有利的。好的一点是,在我们的计划中可以考虑核医学获取的物理学。现在的挑战是从该4-D场中提取精确表征病理的参数。当然,给出这些例子仅是为了说明扩散模型的潜在应用,但是要从医学的观点验证结果并导致有用的临床应用还有许多艰巨的工作要做。
5.3 患者间匹配:3D病例
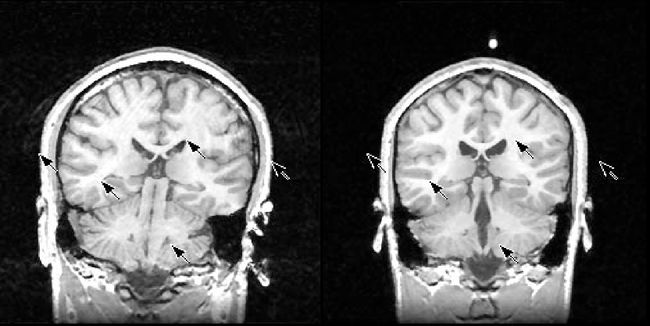
图24.两个不同患者的两片(256 * 256 * 128体素)。

图25.自动匹配后的两名不同患者。
匹配两个不同患者的图像对于医学图像应用非常重要。 我们在图24中显示了两个不同患者的切片,这些切片是从他们的3-D 256 * 256 * 128 MR图像中提取的。 我们将demons1和demons2(但以3-D形式)应用于两个数据块。 使用双射计算,在Dec Alpha工作站上的计算时间仅为30分钟左右,相对于所考虑的数据大小而言,这是相当快的。 图25给出了匹配的结果:变形患者与参考患者之间的差异现在很难被察觉。 仅两个患者之间在拓扑上不同的解剖学细节仍然不同。 同样,demons1比demons2的性能稍好,但是以更多的计算时间为代价。
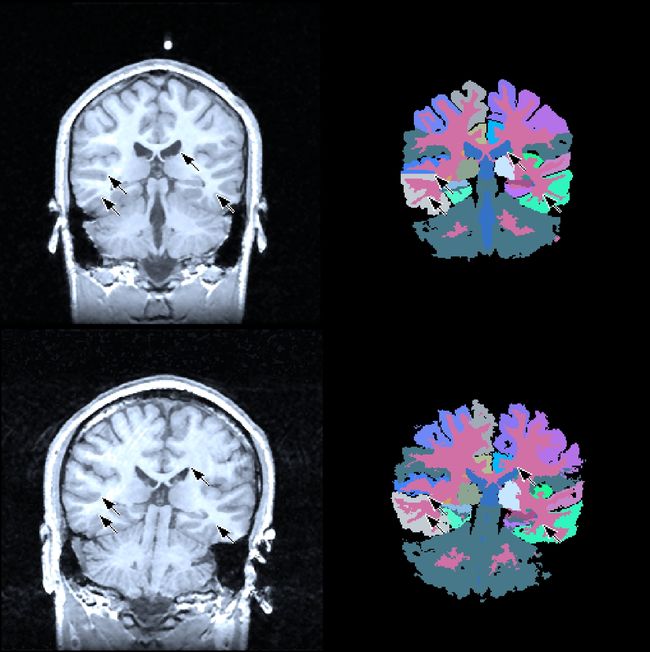
图26.变形场用于使图27所示的3-D解剖图谱适应新患者。第一行:原始标记对象的MR图像的一片以及相应的标记。最下面一行:左,一个新对象的切片,右,通过将变形场应用于标记的参考对象而获得的推断标记。推断在视觉上令人满意,直至局部形态差异。
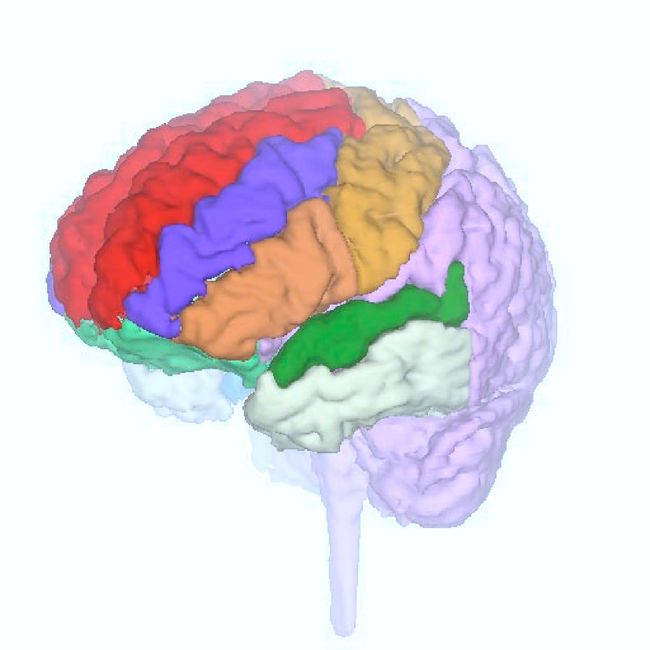
图27.由罗恩·基基尼斯(Ron Kikinis)博士提供并由Gerard Subsol渲染的3D大脑分割图像。
因为我们具有参考图像的3D完全标记版本(由波士顿布里格姆妇女医院的Kikinis博士提供,请参见图27),所以我们能够将计算出的变形场应用于参考图像,并将结果叠加到图像上新患者的标签(图26),为患者提供自动标签。但是,我们注意到,仅在两个对象之间没有局部形态差异的情况下,推断出的标签才是正确的。我们希望通过考虑组织类型,例如在WellsIII等人提出的分割中,通过更局部的最终分割来改善自动标记。 (1995)。田纳西州范德比尔特大学的Benoˆıt Dawant博士使用我们的方法来比较通过推断获得的图像的自动标记,这要归功于我们可以通过几个独立的手动分割产生的变形场(请参见Dawant等,1998)。
5.4 脑图像数据库
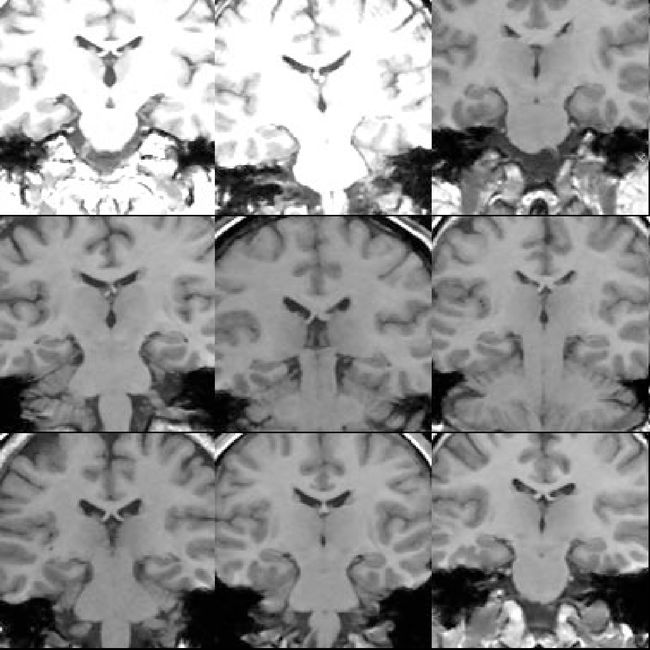
图28.九个不同患者的原始图像的一片(128张中)。形状和强度非常不同。

图29.经过非刚性匹配,重新采样和强度校正后的相同9名患者。该计算完全以3-D执行。请注意,形态学差异得到补偿,但局部形态学差异没有得到补偿。我们的技术已被应用于100多个案例,并且在质量上完全相同。
最后,我们介绍了在大脑图像数据库上执行的自动非刚性匹配的结果。 为了执行此实验,我们修改了方法以自动估计要匹配的两个图像之间的全局偏差和增益。 我们可以简单地通过将迭代过程中两个参数的估计值结合到迭代方案中,这是基于两条图像之间传递函数的直线拟合(具有离群值剔除),它针对一张图像中的每个强度给出了平均强度 在另一幅图像中,基于迭代i估计的对应关系Ti。 我们可以在图28中看到九名不同患者的大脑中部放大图,显示了强度和形状方面的差异。 图29显示了自动匹配的结果:重新采样后,很难理解患者之间的形态学差异,而局部形态学差异仍然存在。

图30.参考图像的左五个连续切片;对,平均有10名患者不匹配;中心是匹配并重新采样后的10位患者的平均值。中间图像中大脑边缘的模糊性表示对象之间剩余的局部形态差异,这些差异已被减少。
图30显示了参考图像的几片,以及与该参考图像匹配之前和之后的10张图像的平均值。整个过程是完全自动的,要匹配两个1283 3-D图像大约需要5分钟的CPU时间。它显示了匹配的质量,并且还表明,大脑的中心部分在解剖学上确实比外围部分(看上去较模糊)更稳定。
5.5 其他医疗应用
我们的非刚性匹配方法已经嵌入到一个更通用的系统中,可以自动浏览大型3D医学图像数据库,以发现患者之间的相似性,并计算出具有代表性的平均标本(参见Guimond等,1997)。 它还被用于正在进行的有关精神分裂症的大型临床研究(E.C. project Biomorph),以测量和比较个体之间的大脑不对称性。 它也已用于计算SPECT图像中的平均激活图(参见Migneco等,1997):正在进行类似的大规模研究,涉及fMRI和使用竞争性非刚性匹配技术的PET激活图像( 参见Collins等,1994)。 最后,我们使用了我们的方法来研究和量化3D脑MRI时间序列中多发性硬化斑块的演变(请参阅Thirion和Calmon,1997)。
5.6 用真实图像进行验证
患者间匹配的主要问题是如何验证不同的方法。 在Thirion等人中(1996年),我们将三种不同的患者间匹配技术与干颅骨CT扫描数据库进行了仔细比较:一种匹配方法是基于解剖学家定义的特征点,一种是基于可变形的3-D冠状线,以及 最后一种技术是基于demons的方法。 这项研究的主要结果是:
†三种匹配方法给出了相互一致的结果,平均点到点距离约为3个体素;
†用于计算平均患者模型的平均距离减少到大约2个体素;
†选择的参考患者对所得平均模型计算的平均影响小于1体素。
如上所述,范德比尔特大学正在使用我们的工具进行的一项研究为自动细分的应用提供了另一项独立的验证。
视频演示
可以从以下网站获得两个视频序列,这些视频序列说明了在两个患者之间测得的3-D变形场:http://www.inria.fr/epidaure/Gallery/atlas movie.html and atlasmovie2.html
6 结论
我们提出了用于图像间匹配的扩散模型的概念,以及相关的demons概念,以强调极性信息在匹配方法中的作用。扩散模型对应于将可变形模型网格“扩散”到场景图像中,在该图像中,被扫描对象的边界被认为是半透膜,根据它们的极性(内部或内部)过滤模型的点。外)。我们还表明,可以将光学流视为扩散模型与基于吸引力的更经典匹配方法之间的中间步骤。
扩散模型和demons可以是从原始角度检查匹配方法,产生导致新方法的思想或通过考虑极性(通常低估其重要性)来改进现有方法的工具。将匹配视为扩散过程也可能是将热力学新思想引入图像匹配的一种方式。
在应用方面,我们展示了将这些想法应用到医学领域的不同方法,例如器官跟踪或3-D患者间匹配。现在,开发和测试这种3D非刚性匹配工具对于诊断,手术计划和控制,乃至更广泛地理解人体解剖结构及其可变性而言,是一个非常重要的挑战。
致谢
我要感谢尼古拉斯·亚亚奇(Nicholas Ayache),迈克尔·布雷迪(Michael Brady),莫滕·布·尼尔·尼尔森(Morten Bro Nielsen),热罗梅·德克勒克(J'erˆome Declerck),热拉尔·苏伯索(G'erard Subsol),泽维尔·潘尼科(Havier Pennec),埃尔维·德林格特(Herv'e Delingette),西尔万·普里马(Sylvain Prima),亚历山大·吉蒙德(Alexandre Guimond)和Epidaure人民,他们在讨论中引起了广泛的讨论并提出了具体的评论本文提出的想法。特别感谢实现Canny-Deriche-Monga边缘检测功能的Gregoire Malandain,以及Allen Sanderson对本文早期版本的认真阅读。
参考文献
Aggarwal, J. K. and Nandhakumar, N. (1988) On the computation of motion from sequences of images—a review. Proc. IEEE, 76, 917–935.
Anandan, P. (1989) A computational framework and an algorithm for the measurement of visual motion. Int. J. Comput. Vision, 2, 283–310.
Ayache, N. (1991) Artificial Vision for Mobile Robots: Stereo Vision and Multisensory Perception. MIT Press, Cambridge, MA.
Bajcsy, R and Kovacic, S. (1989) Multiresolution elastic matching. Comp. Vision, Graphics Image Processing, 46, 1–21.
Bardinet, E., Cohen, L. D. and Ayache, N. (1994) Fitting of iso-surfaces using superquadrics and free-form deformations. In Proc. IEEE Workshop on Biomedical Images Analysis (WBIA’94), Seattle, WA.
Barron, J. L., Fleet, D. J. and Beauchemin, S. S. (1994) System and experiment: performance of optical flow techniques. Int. J. Comp. Vision, 12, 43–77.
Benayoun, S. and Ayache, N. (1995) Dense non-rigid motion estimation in sequences of 3D images using differential constraints. Int. J. Comput. Vision, 26, No 1.
Besl, P. J. and McKay, N. D. (1992) A method for registration of 3-d shapes. IEEE PAMI, 14, 239–255.
Blake, A. and Yuille, A. (1992) Active Vision. MIT Press, Cambridge, MA.
Bookstein, F. L. and Green, W. D. K. (1993) A feature space for derivatives of deformations. In Barrett, H. H. and Gmitro, A. F. (eds), Information Processing in Medical Imaging, (IPMI’93), Lecture Notes in Computer Science, Vol. 687, pp. 1–16. Springer-Verlag, Flagstaff, AZ.
Borgefors, G. (1988) Hierarchical chamfer matching: a parametric edge matching algorithm. IEEE Trans. PAMI, 10, 849–865.
Bro-Nielsen, M. and Gramkow, C. (1996) Fast fluid registration of medical images. In H¨ohne, K. H. and Kikinis, R. (eds), Visualization in Biomedical Computing VBC’96, Lecture Notes in Computer Science, Vol. 1131, pp. 267–276. Springer-Verlag, Hamburg.
Burr, D. J. (1981) A dynamic model for image registration. Comp. Graphics Image Processing, 15, 102–112.
Catt´e, F., Lions, P.-L., Morel, J.-M. and Coll, T. (1992) Image selective smoothing and edge detection by nonlinear diffusion. SIAM J. Numer. Anal., 29, 182–193.
Chakraborty, A., Staib, L. H. and Duncan, J. S (1996) Deformable boundary finding in medical images by integrating gradient and region information. IEEE Trans. Med. Imag., 15, 859–870.
Christensen, G. E., Miller, M. I. and Vannier, M. (1994a). A 3D deformable magnetic resonance textbook based on elasticity. In AAAI Spring Symp. Series: Applications of Computer Vision in Medical Image Processing, pp. 153–156. Standford University, Stanford, CA.
Christensen, G. E., Rabbitt, R. D. and Miller, M. I. (1994b). 3D brain mapping using a deformable neuroanatomy. Phys. Med. Biol., 39, 609–618.
Christensen, G. E., Miller, M. I. and Vannier, M. W. (1996) Individualizing neuro-anatomical atlases using a massively parallel computer. IEEE Computer, 32–38.
Collins, D. L., Neelin, P., Peters, T. M. and Evans, A. C. (1994) Automatic 3D intersubject registration of MR volumetric data in standarized Talairach space. J. Comp. Assis. Tomogr., 18, 192–205.
Davatzikos, C. (1996) Nonlinear registration of brain images using deformable models. In Workshop on Mathematical Methods in Biomedical Image Analysis, pp. 94–103, San Francisco, CA. IEEE.
Dawant, B. M., Thirion, J.-P., Maes, F., Vandermeulen, D. and Demaerel, P. (1998) Automatic 3d segmentation of internal structures of the head in MR images using a combination of similarity and free form transformations. In SPIE Medical Imaging 1998, Vol. 3338, San Diego, CA.
Declerck, J., Subsol, G., Thirion, J.-P. and Ayache, N. (1995) Automatic retrieval of anatomical structures in 3D medical images. In Computer Vision, Virtual Reality and Robotics in Medicine, Lecture Notes in Computer Science, Vol. 905, pp. 153–162. Springer-Verlag, Nice.
Deriche, R. (1986) Using Canny’s criteria to derive a recursively implemented optimal edge detector. Int. J. Comp. Vision, 6, 167–187.
Faugeras, O. (1993) Three-Dimensional Computer Vision: a Geometric Viewpoint. The MIT press, Cambridge, MA.
Feldmar, J. and Ayache, N. (1994) Locally affine registration of freeform surfaces. In IEEE Conf. on Computer Vision and Image Processing (CVPR’94), pp. 496–500, Seattle, WA.
Gee, J. C., Reivich, M. and Bajcsy, R. (1993) Elastically deforming 3D atlas to match anatomical brain images. J. Comp. Assis. Tomogr., 17, 225–236.
Gerig, G., K¨ubler, O., Kikinis, R. and Jolesz, F. A. (1992) Nonlinear anisotropic filtering of MRI data. IEEE Trans. Med. Imag., 11, 221–232.
Guimond, A., Subsol, G. and Thirion, J.-P. (1997) Automatic MRI database exploration and applications. Int. J. Patt. Recogn. Artific. Intell., 11, 1345–1365.
Horn, B. P. K. and Schunck, B. G. (1981) Determining optical flow. Artific. Intell., 17, 185–203.
Kass, M., Witkin, A. and Terzopoulos, D. (1987) Snakes: active contour models. Int. J. Comp. Vision, 1, 312–331.
Kichenassamy, S., Kumar, A., Olver, P., Tannenbaum, A. and Yezzi, A. (1995) Gradient flows and geometric active contour models. In 5th Int. Conf. on Computer Vision (ICCV’95), pp. 810–815, Cambridge, MA. IEEE.
Kimia, B. and Siddiqi, K. (1994) Geometric heat equation and nonlinear diffusion of shapes and images. In Conf. on Computer Vision and Pattern Recognition (CVPR’94), pp. 113–120, Seattle, WA, USA.
Maes, F., Collignon, A., Vandermeulen., D., Marchal, G. and Suetens, P. (1997) Multimodality image registration by maximization of mutual information. IEEE Trans. Med. Imag., 16, 187–198.
Malandain, G., Fern´andez-Vidal, S. and Rocchisani, J. M. (1994) Improving registration of 3-D medical images using a mechanical based method. In Proc. 3rd Eur. Conf. on Computer Vision (ECCV ’94), pp. 131–136, Stockholm, Sweden. Lecture Notes in Computer Science, Vol. 801.
Migneco, O., Thirion, J-P., Benoit, M., Malandain, G., Robert, P., Ayache, N. and Darcourt, J. (1997) Spect memory activation studies thanks to non-rigid automated 3D image registration. In The Joint CVRMed-MRCAS Conf., pp. 487–490, Grenoble.
Monga, O., Deriche, D., Malandain, G. and Cocquerez, J. P. (1990) 3D edge detection by recursive filtering and edge tracking. In Int. Conf. on Pattern Recognition (ICPR), Atlantic City, USA.
Perona, P. and Malik, J. (1990) Scale-space and edge detection using anisotropic diffusion. IEEE PAMI, PAMI-12, 629–639.
Radeva, P., Serrat, J. and Mart´ı, E. (1995) A snake for model-based segmentation. In 5th Int. Conf. on Computer Vision (ICCV’95), pp. 816–821, Cambridge, MA. IEEE.
Rohr, K., Stiehl, H. S., Sprengel, R., Beil, W., Buzug, T. M., Weese, J. and Kuhn, M. H. (1996) Point-based elastic registration of medical image data using approximating thin-plate splines. In H¨ohne, K. H. and Kikinis, R. (eds), Visualization in Biomedical Computing VBC’96, Lec. Notes in Computer Science, Vol. 1131, pp. 297–306. Springer-Verlag, Hamburg.
Ronfard, R. (1994) Region-based strategies for active contour models. Int. J. Comp. Vision, 13, 229–251.
Shi, P., Robinson, G., Chakraborty, A., Staib, L., Constable, R., Sinusas, A. and Duncan, J. (1995) A unified framework to assess myocardial function from 4d images. In Computer Vision, Virtual Reality and Robotics in Medicine, Lecture Notes in Computer Science, Vol. 905, pp. 327–337. Springer-Verlag, Nice.
Simoncelli, E. P., Adelson, E. H. and Heeger, D. J. (1991) Probability distributions of optical flow. In Computer Vision and Pattern Recognition, CVPR’91, pp. 310–315, Lahaina, Maui, Hawaii. IEEE.
Szeliski, R. and Coughlan, J. (1994) Hierarchical spline-based image registration. In IEEE Conf. on Computer Vision and Pattern Recognition (CVPR’94), pp. 194–201, Seattle, WA.
Szeliski, R. and Lavall´ee, S. (1994) Matching 3-d anatomical surfaces with non-rigid volumetric deformations. In Proc. IEEE Workshop on Biomedical Images Analysis (WBIA’94), Seattle, WA. Also in AAAI 1994 Spring Symposium Series. Application of Computer Vision in Medical Image Processing, Stanford University, 1994.
Thirion, J.-P. (1994) Extremal points: definition and application to 3D image regist ration. In IEEE Conf. on Computer Vision and Pattern Recognition, pp. 587–592, Seattle, WA.
Thirion, J.-P. (1995) Fast non-rigid matching of 3D medical images. In Medical Robotics and Computer Aided Surgery (MRCAS’95), pp. 47–54, Baltimore.
Thirion, J.-P. (1996) Non-rigid matching using demons. In Computer Vision and Pattern Recognition, CVPR’96, San Francisco, CA.
Thirion, J.-P. and Calmon, G. (1997) Measuring lesion growth from 3D medical images. In Nonrigid and Articulated Motion Workshop (NAM’97), Puerto Rico. IEEE.
Thirion, J.-P., Subsol, G. and Dean, D. (1996) Cross validation of three inter-patients matching methods. In Visualization in Biomedical Computing, VBC’96, Lecture Notes in Computer Science, Vol. 1131, pp. 327–336, Hamburg.
Thompson, P. and Toga, A. W. (1996) A surface-based technique for warping three-dimensional images of the brain. IEEE Trans. Med. Imag., 15, 402–417.
Viola, P. and Wells, W. M. III (1995) Alignment by maximization of mutual information. In 5th Int. Conf. on Computer Vision, ICCV’95, pp. 16–23, Cambridge, MA. IEEE.
Wells III, W. M., Grimson, W. E.L., Kikinis, R. and Jolesz, F. A. (1995) Adaptative segmentation of mri data. In Computer Vision, Virtual Reality and Robotics in Medicine, Lecture Notes in Computer Science, Vol. 905, pp. 59–69. Springer-Verlag, Nice.
Zhang, Z. (1992) Iterative Point Matching for Registration of Freeform Curves. Technical Report 1658, INRIA.