RT-Thread记录(二、RT-Thread内核启动流程 — 启动文件和源码分析)
在上一篇文章中,我们了解了RT-Thread的版本以及开发环境,使用RT-Thread Studio成功创建了一个工程。
但是要了解一个操作系统,内核的了解是必不可少的,
我们今天就在前面我们RT-Thread Studio工程基础之上讲一讲RT-Thread内核启动流程
.. 更新一个说明,SMP是对多核处理器的支持相关部分 2022/3/15
RT-Thread启动流程
- 1、基础介绍
- 2、源码分析
-
- 2.1 汇编部分 — startup_xxxx.s说明
- 2.2 C部分 — rtthread_startup 说明
-
- 2.2.1 板级硬件初始化 — rt_hw_board_init
- 2.2.2 RT-Thread 堆和栈空间说明(与FreeRTOS不同)
- 2.2.3 main线程创建 — rt_application_init
- 2.2.4 调度器说明
1、基础介绍
内核启动流程在官方介绍的链接如下:
RT-Thread 官方内核启动流程介绍
我在 STM32 专栏中,有单独一篇博文介绍过STM32 的启动:
STM32的启动过程(startup_xxxx.s文件解析)
在裸机程序中,一般在 .s 文件中就跳转到 _main从而跳转到 main()函数启动,而 RT-Thread 启动会先跳转到其启动函数 rtthread_startup()进行一系列的必要的初始化,最后才跳转至 main()函数。
简单来说就是: 程序启动,通过 startup_xxxx.s 文件(汇编语言)跳转到 RT-Thread启动函数rtthread_startup() (C语言),再通过 rtthread_startup() 跳转到 main()(C语言)函数。
官方的图片很详细的表明了这个流程:

在 RT-Thread 中,会把 main()函数 当成是一个线程。这个在 rtthread_startup() 就会将 main() 创建成一个线程,除此之外,rtthread_startup() 还会创建timer线程 和 空闲线程 这两个线程。
结合上图,下面我们通过上篇文章创建的示例代码来说明一下这个流程。
2、源码分析
2.1 汇编部分 — startup_xxxx.s说明
打开RT-Thread Studio工程,在哪里找到 startup_xxxx.s 文件呢,看下面一张图:

我们找到了启动文件,可以打开查看,启动文件的说明我在我在另一篇博文有详细的介绍
STM32的启动过程 — startup_xxxx.s文件解析(更新GCC环境下的启动文件分析)
已经讲解的比较详细了,这里我只把主要的简单说明一下。在上面推荐的博文中讲到过,GCC环境下面的启动,需要两个文件,一个是 startup_xxxx.s文件,还一个是 .ld链接文件,我们先看一下链接文件:

在以前讲过,GCC下的链接文件主要制定了入口函数,堆栈大小和数据段的整体布局。在上图中我们看到值定义了系统栈的大小,并没有定义堆大小。
这里为什么只定义系统栈?
虽然我们在其他博文说过,如果不用 malloc函数,不需要用到堆,这里没有定义是因为在后面初始化的时候会根据是否使用堆,来定义堆的大小。
在本文下面板级硬件初始化部分有介绍说明。
然后就简单来看一下 startup_xxxx.s文件,首先我们找到上电执行的第一个指令 Reset_Handler(芯片刚上电,就是上电复位,直接就会触发Reset_Handler):

上图中所进行的操作不理解的可以查看博文:
STM32的内存管理相关(内存架构,内存管理,map文件分析)
完成数据搬运以后,就是系统基本的初始化,如下图:

完成基本初始化,MCU得以运行起来,就跳转到我们上面基础介绍里面说到的入口函数,如下图:

通过上面的步骤,最终就从 .s 中的汇编跳转到了 C语言部分,通过入口函数跳转到 rtthread_startup函数,我们通过下面的介绍说明一下,进入rtthread_startup函数 后,RT-Thread 确实做了哪些工作。
2.2 C部分 — rtthread_startup 说明
在本文第一节基础介绍中通过官方的一张图表示了进入rtthread_startup后,所会进行的操作,我们上面也说明了工程是怎么进入 rtthread_startup 函数的,那么进入 rtthread_startup函数 后执行了哪些操作,如下图:
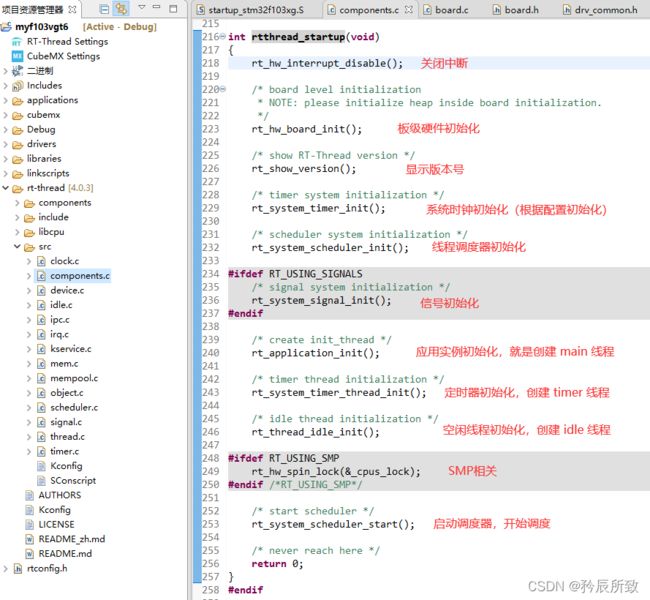
补充说明: 上图中的SMP相关,是与多核处理器有关的设置。
上面的过程很好理解,主要有做了以下工作:
1、基本的硬件初始化;
2、一定会创建main现 线程;
3、根据是否使用软件定时器创建 time r线程;
4、一定会创建 idle 线程;
5、初始化开启调度器;
其中有一些初始化我们可以更加深入的看看具体的操作:
2.2.1 板级硬件初始化 — rt_hw_board_init
使用rt_hw_board_init函数进行了硬件相关的初始化,如下图:

2.2.2 RT-Thread 堆和栈空间说明(与FreeRTOS不同)
在上图中,有一点比较特殊,就是对 堆 空间的初始化,我们以前遇到的都是在启动文件中定义好堆栈空间,而我们上面分析 RT-Thread 启动文件的时候,只定义了栈空间,堆空间没有定义,其实是放在了这个地方:

刚开始看到这里还有个疑问,HEAP 把余下 所有的 RAM 都使用了,按照以前的理解,系统栈应该是在最后面的位置的,这里是怎么回事?
关于 系统栈位置的问题,可以参考博文:RTOS的 任务栈 和 系统栈
上面我们通过源码看到的结论和 这篇博文说到的不一样(当时是用裸机和 FreeRTOS作为例子说明的),然后在 RT-Thread 下,系统栈的位置在什么地方,于是乎回头看了看定义数据段整体布局的链接文件:
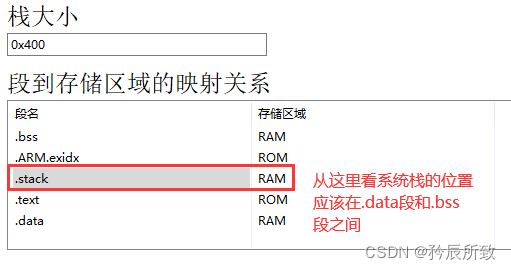
通过链接文件我们可以推断 .stack 的位置,那么为了确认一下,我们可以查看程序编译过后的 .map文件:
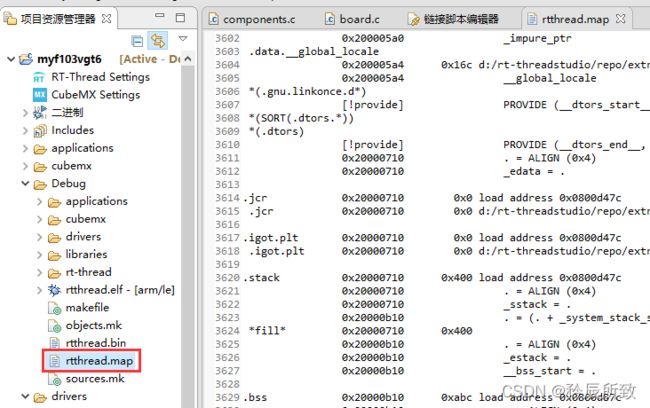
在 RAM 数据段我们可以查看数据存放的位置,找到关于 系统栈的位置部分:

确认了在 RT-Thread 中,系统栈的位置是确实存放于 .data 段和 .bss 之间的,所以堆空间即便使用了余下全部的 ram 空间也是没有问题的。
2.2.3 main线程创建 — rt_application_init
在 RT-Thread 中,创建了一个名字为 "main" 的线程来调用 main() 函数,就是在rtthread_startup函数中的rt_application_init(),如下图:

2.2.4 调度器说明
调度器是操作系统的核心知识,调度器是基于链表进行操作的,具体的原理将来会单独写一篇文章说明,这里我们就简单的过一遍,知道函数的用意。
在rtthread_startup函数中,使用rt_system_scheduler_init();初始化调度器,rt_system_scheduler_start();开启调度器,开启调度器之后,线程之间就会根据一定的规则进行切换(时间片,优先级):

开启调度器后,会在就绪列表中找到最高优先级的线程,然后通过设置 线程指针(PSP),来跳转到对应的位置执行:
线程指针什么意思,可以参考博文:FreeRTOS记录(三、FreeRTOS任务调度原理解析_Systick、PendSV、SVC)

至此,整个系统就正常跑起来了,然后用户运行自己想要做的事情,可以在 main 中设计自己的应用代码,或者创建线程。