【Apollo 6.0项目实战】Canbus模块
文章目录
- 前言
-
- Apollo 6.0软件框架
- 一、Canbus模块简介
- 二、teleop 测试工具介绍
- 三、tester 测试工具介绍
- 四、诊断工具介绍
- 五、LGSVL 与 Apollo 6.0 联合仿真
-
- 1. Apollo启动
- 2. 启动LGSVL仿真器
- 参考
前言
环境:
- Ubuntu 20.04
- Apollo 6.0
- LGSVL仿真器
Apollo 6.0安装教程参考【Apollo 6.0项目实战】Apollo 6.0安装
LGSVL仿真器安装配置教程参考【Apollo 6.项目实战】LGSVL 与 Apollo6.0联合仿真教程
Apollo 6.0软件框架

- Perception——感知模块识别自动驾驶汽车周围的环境。感知模块内部包含两个重要的子模块:障碍物检测和交通灯检测。
- Prediction——预测模块用来预测与感知障碍物未来的运动轨迹。
- Routing——路由模块告诉自动驾驶汽车通过全局路径到达目的地。
- Planning——规划模块规划自动驾驶汽车要采取的时空轨迹。
- Control——控制模块通过产生油门、刹车和转向等控制命令来执行计划的时空轨迹。
- CanBus —— CanBus 是将控制命令传递给车辆硬件的接口。它还将机箱信息传递给软件系统。
- HD-Map——该模块类似于库。它不是发布和订阅消息,而是经常用作查询引擎支持,以提供关于道路的特定结构化信息。
- Localization——定位模块利用各种信息源(如 GPS、LiDAR 和 IMU)来估计自动驾驶汽车的位置。
- HMI ——Apollo 中的人机界面或 DreamView 是用于查看车辆状态、测试其他模块和实时控制车辆功能的模块。
- Monitor——车辆中所有模块的监控系统,包括硬件。
- Guardian——新的安全模块,用于干预监控检测到的失败和action center相应的功能。 执行操作中心功能并进行干预的新安全模块应监控检测故障。
- Storytelling——隔离和管理复杂场景的新模块,创建可触发多个模块操作的Story。所有其他模块都可以订阅此特定模块。
本文讲解的是在 LGSVL 仿真环境中,如何使用Apllo提供的底盘调试工具对车辆底盘进行调试。主要的目的是了解下 canbus 模块、canbus_teleop 、canbus_tester 以及 cyber_monitor工具的使用。
一、Canbus模块简介
Canbus模块,其实是Chassis底盘控制模块,其主要的作用是反馈车辆当前的状态(速度、航向、yaw_rate等信息),并且发送控制命令到线控底盘,其底层实现基于 “drivers/canbus” 驱动模块。
Canbus模块是车和自动驾驶软件之间的桥梁,通过canbus驱动(drivers/canbus)来实现将车身信息发送给apollo上层软件,同时接收控制命令,发送给汽车线控底盘实现对汽车的控制。
关于Canbus模块的详细介绍可参考
apollo介绍之Canbus模块(八)
Apollo之Canbus模块学习总结
Apollo CANBUS模块解析
二、teleop 测试工具介绍
底盘联调测试就是通过将Apollo与车辆进行canbus通信后,测试Apollo下发控制信号(如加速/减速/转向/使能等)是否能够准确控制车辆,测试车辆的底盘反馈信号(如当前踏板百分比反馈/当前转角反馈/使能反馈/接管反馈等)是否与反馈了车辆的实际状态,验证Apollo下发的控制指令,车辆底盘能够准确执行。
apollo 里为开发者提供了一个teleop的测试工具,在apollo/modules/canbus/tools/teleop.cc,在terminal内输入
./scripts/canbus_teleop.sh
显示如下:
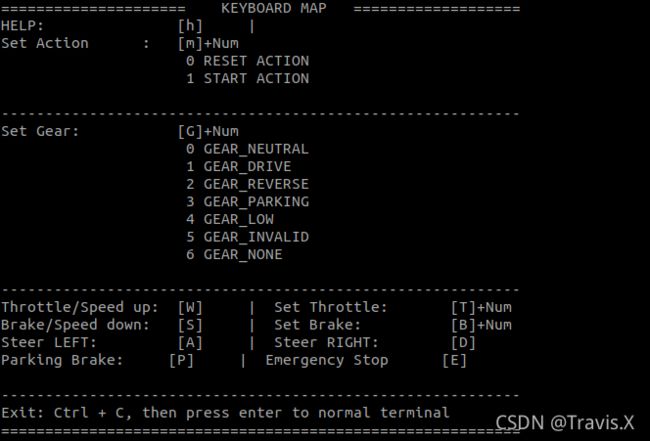
| 键位 | 功能 |
|---|---|
| h | 可以调出上图所示的帮助界面,可以查询Teleop工具的使用方法。 |
| Set Action: [m] + Num | 执行Apollo对车辆的使能控制:按m和0键组合,表示执行reset指令,车辆退出自动驾驶模式; 按m和1键组合,表示执行start指令,车辆进入自动驾驶模式。 |
| Set Gear : [G] + Num | 设置档位:按g和数字组合,进行相应档位设置:按g+0挂入N档(空挡); 按g+1挂入D档(前进挡); 按g+2挂入R档(倒车档); 按g+3挂入P档(驻车档)。 |
| Throttle/Speed up: [w] | 表示每次增加油门踏板量2%,车辆加速:按 w 键增加油门踏板2%,使车辆加速。如果当前已经执行brake刹车指令,按w表示减少刹车踏板 |
| Set Throttle: [T] + Num | 设置油门踏板百分比:按t+数字可以直接设置具体的油门踏板百分比,油门踏板可设置的百分比数为0~100。如执行t20,表示直接设置当前油门踏板量为20%,并将刹车踏板百分比置为0,这一点与实际开车逻辑一致,如果踩下油门踏板,就不能踩刹车踏板。 |
| Brake/Speed down: [S] | 车辆减速:按s键增加刹车踏板百分比,使车辆减速。如当前已经执行throttle加速指令,按s键表示减少油门踏板百分比。 |
| Set Brake: [B] + Num | 设置刹车踏板百分比:按b+数字可以直接设置具体的刹车踏板百分比,刹车踏板可设置的百分比数为0~100。如执行b20,表示直接设置当前刹车踏板量为20%,并将油门踏板百分比置为0,这一点与实际开车逻辑一致,如果踩下刹车踏板,就不能踩油门踏板。 |
| Steer LEFT: [A] | 方向盘每次向左转2%:按a键表示每次向左转2%的方向盘最大转角,具体转动角度应根据车辆设置的最大方向盘转角乘以2%进行换算。 该指令执行可以在车辆静止时执行,也可以在车辆启动后执行。 |
| Parking Brake: [P] | 打开电子手刹:按P键(注意是大写P)可以手动控制车辆电子手刹开关。这个功能根据车辆的是否提供了电子手刹的控制接口而实现。注意:执行电子手刹开启或释放时,请将车辆用teleop设置为P档状态。 |
| Emergency Stop: [E] | 紧急停车:按E键(注意是大写E)可以进行车辆紧急停车,默认执行50%刹车。 建议开发者在测试时尽量少用此功能,体感差,调试车辆时多注意周围情况。发生突发情况时及时用外接踩刹车踏板的方式进行手动接管车辆。 |
三、tester 测试工具介绍
tester 测试 canbus 模块用的数据,能发送指定的控制消息。
运行
./scripts/canbus_tester.sh
可能会出现的错误
F1126 11:52:40.193882 60034 utilities.cc:346] Check failed: !IsGoogleLoggingInitialized() You called InitGoogleLogging() twice!
*** Check failure stack trace: ***
./scripts/canbus_tester.sh: line 24: 60034 Aborted (core dumped) ./bazel-bin/modules/canbus/tools/canbus_tester --canbus_test_file=modules/canbus/testdata/canbus_test.pb.txt
解决方法:看这里,修改modules/canbus/tools/canbus_tester.cc,注释掉 google::InitGoogleLogging(argv[0]); 这一行,再重新编译和输入上述指令即可。
四、诊断工具介绍
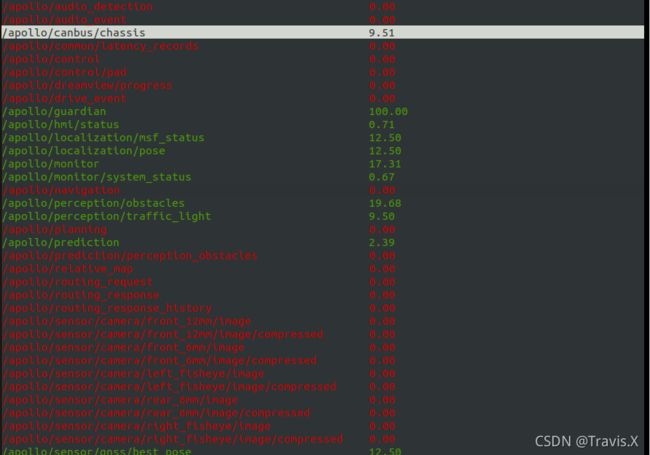
cyber_monitor提供了终端中实时显示channel信息列表的功能。了解了 teleop 测试工具的基本操作后,开发者根据相应的指令,对车辆执行具体的控制命令,然后通过Apollo的可视化监控工具cyber_monitor进行查看车辆当前的反馈信号,确认控制下发后车辆的执行结果是否正确。
进入Apollo Docker环境后执行如下命令运行cyber_monitor。
cyber_monitor
在apollo/modules/canbus/conf/canbus.conf文件内: 修改配置–noenable_chassis_detail_pub为–enable_chassis_detail_pub,表示在打开chassis_detail底盘详细信息,即可以查看底盘反馈信号的每一帧报文原始信息。 修改配置–receive_guardian为–noreceive_guardian,即可以关闭guardian模式,进入canbus的调试模式,这样teleop时就能够控制车辆了。如下图所示是修改canbus_conf配置文件。
–flagfile=/apollo/modules/common/data/global_flagfile.txt
–canbus_conf_file=/apollo/modules/canbus/conf/canbus_conf.pb.txt
–enable_chassis_detail_pub
–receive_guardian
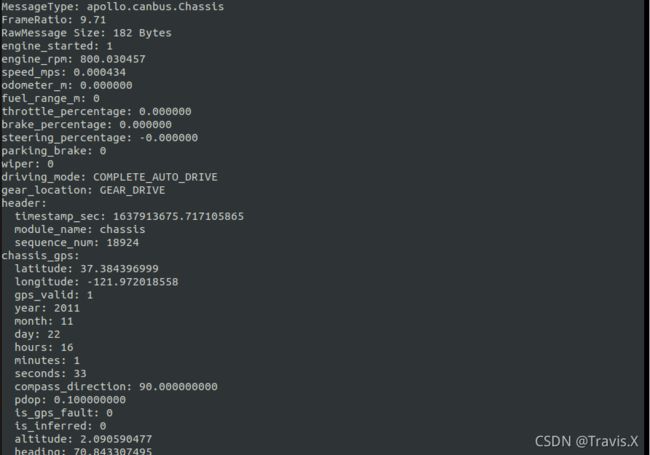
通过方向键选择/apollo/canbus/chassis的Channel按回车键,即可查看底盘的控制信息。
五、LGSVL 与 Apollo 6.0 联合仿真
1. Apollo启动
cd apollo/
./docker/scripts/dev_start.sh
./docker/scripts/dev_into.sh
./scripts/bootstrap_lgsvl.sh
./scripts/bridge.sh
打开Dreamview http://localhost:8888/,在上方选择对应的模式、车型以及地图(根据自己的仿真环境选择相应的地图)。
2. 启动LGSVL仿真器

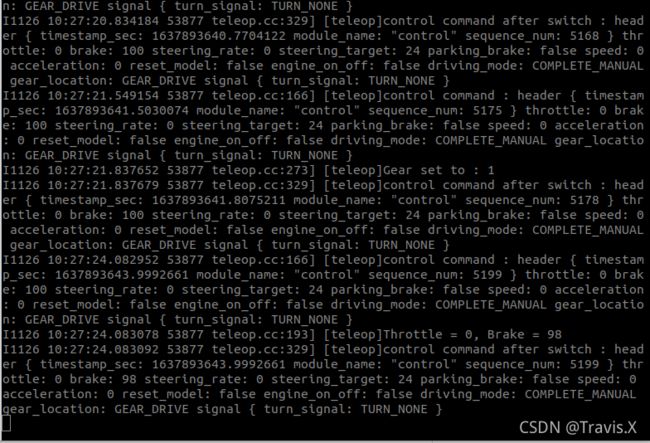
启动 teleop 测试工具,打开新的终端输入
./scripts/canbus_teleop.sh
在终端使用不同的按键,查看终端车辆控制信息变化、Dreamview右侧栏数值变化以及仿真车辆的行为变化。

参考
【1】Apollo车辆适配教程
【2】Apollo详解之canbus模块——车辆底层协议调试
【3】apollo介绍之Canbus模块(八)
【4】Apollo之Canbus模块学习总结
【5】Apollo CANBUS模块解析