Opencv模板匹配破解滑动验证码基于python
如果你直接使用模板匹配效果并不理想的话,可以试试这种方法,我们现将图片进行自适应阈值处理,这样的则可以增强轮廓边缘的信息,让效果更加显著,在使用边缘检测保留更多信息,由于缺口位置是半透明阴影状态,模板图片和缺口位置存在相同信息,则可以大大提高匹配准确率。
展示图片
两张图片一张是滑块背景图

另一张是 模板也就是小的拼图

思路分析
导入图片
import cv2
img_rgb = cv2.imread(img_path)
template = cv2.imread(tm_path)
自适应阈值
将导入后的图片进行自适应阈值处理得到结果如下:
img_thresh = cv2.adaptiveThreshold(img_gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 25, 5)
tm_thresh = cv2.adaptiveThreshold(template, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 25, 5)

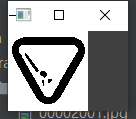
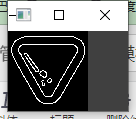
边缘检测
接下来进行边缘检测 将范围调制较大保留更多边缘,
img_canny = cv2.Canny(img_thresh, 0, 500)
tm_canny = cv2.Canny(tm_thresh, 0, 500)

模板匹配
得到边缘检测的结果后,在进行模板匹配
我们使用归一化系数匹配法 TM_CCOEFF_NORMED
在用minMaxLoc方法求出最大值,和最小值,以及他们的坐标
res = cv2.matchTemplate(img_canny, tm_canny, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
计算矩形坐标
h, w = template.shape[:2]
right_bottom = (max_loc[0] + w, max_loc[1] + h) # 右下角
cv2.rectangle(img_rgb, max_loc, right_bottom, (0, 0, 255), 2)
我们拿到模板图像的高和宽,在通过我们的max_loc为矩形的左上角坐标x轴加上宽得到矩形右下角x坐标,y轴坐标加上高得到右下角y坐标
在使用rectangle方法将其显示出来。
结果展示
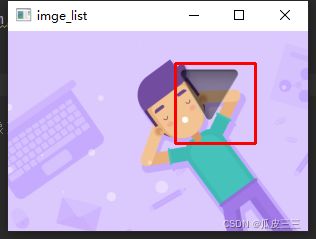
可以看到还是很准确的,矩形面积大是因为,模板的宽高没有进行处理,存在透明通道部分。
下面我们可以测试多图看一下效果。


也可以看到检测不准的,当然图像处理的方法并不能解决,所有的滑块问题,因为不同的滑块之前却别也是很大的,有的透明背景图,有的纯白色,有的纯黑色,有的透明通道为缺口。
完整代码
def template_matching(img_path, tm_path):
# 导入图片,灰度化
img_rgb = cv2.imread(img_path)
template_rgb = cv2.imread(tm_path)
img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY)
tm_gray = cv2.cvtColor(template_rgb, cv2.COLOR_BGR2GRAY)
# 自适应阈值话
img_thresh = cv2.adaptiveThreshold(img_gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 25, 5)
tm_thresh = cv2.adaptiveThreshold(tm_gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 25, 5)
# 边缘检测
img_canny = cv2.Canny(img_thresh, 0, 500)
tm_canny = cv2.Canny(tm_thresh, 0, 500)
cv2.imshow("img_canny", img_canny)
cv2.imshow("tm_canny", tm_canny)
h, w = template_rgb.shape[:2]
# 模板匹配
res = cv2.matchTemplate(img_canny, tm_canny, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
right_bottom = (max_loc[0] + w, max_loc[1] + h) # 右下角
# 圈出矩形坐标
cv2.rectangle(img_rgb, max_loc, right_bottom, (0, 0, 255), 2)
# 保存处理后的图片
cv2.imwrite('res.png', img_rgb)
# 显示图片 参数:(窗口标识字符串,imread读入的图像)
# cv2.imshow("test_image", img_rgb)
return img_rgb