OpenCV项目1-OCR识别
文章目录
- 项目思路:
-
- 1、灰度化处理:
- 2、采用高斯滤波去噪
- 3、边缘检测
- 4、查找轮廓并排序:
- 5、绘制全部轮廓
- 6、多边形逼近
- 7、仿射变换
- 8、写入图片文件
- 9、扫描读取
- 10、写入本地
文章处理的图片:
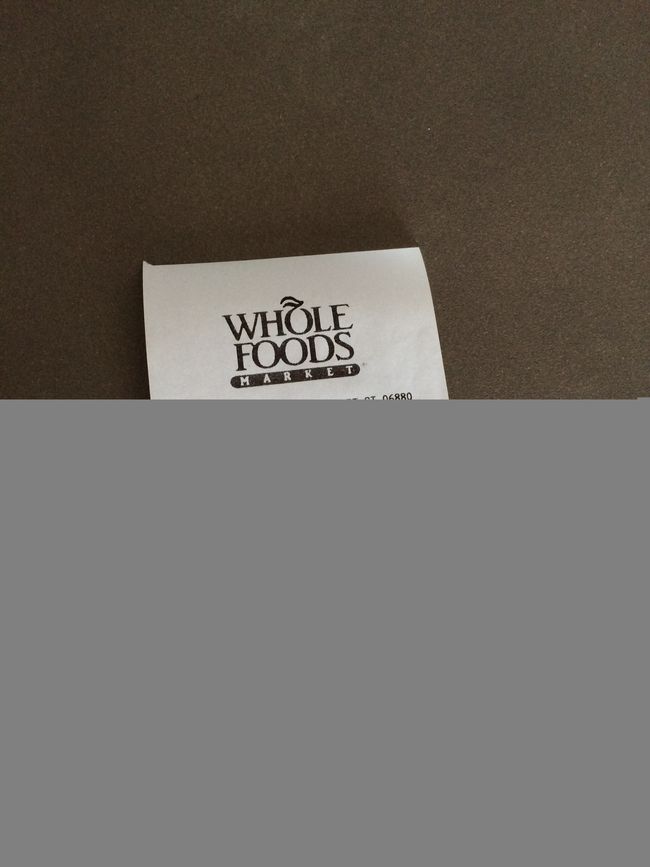
项目思路:
思路:我们拿到一张图片不是直接就识别的,而是做一些处理,去除我们不需要的信息,保留我们所需要的信息,再做识别。
通常要做的是对图片进行灰度化处理,再进行滤波,形态学等等去除掉不要的信息。
因为在处理的过程中,我们要对每一步处理后的图片进行查看分析,我们要显示很多次图片,因此我们可以把显示图片的功能封装成一个函数形式来使用:
# 显示图片
def cv_show(winname, image):
cv2.imshow(winname, image)
# 销毁窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
我们在拿到一张图片的时候,有时候图片的大小不好处理,比如我们这次处理的图片的大小为3264×2448。我们先对尺寸大小进行处理。

可以将修改尺寸的功能封装成一个函数:
# 封装resize功能.
def resize(image, width=None, height=None, inter=cv2.INTER_AREA):
dim = None # 缩放后的宽和高
(h, w) = image.shape[:2]
# 不做处理
if width is None and height is None:
return image
# 指定了resize的height
if width is None:
r = height / float(h) # 缩放比例
dim = (int(w * r), height)
# 指定了resize的width
else:
r = width / float(w)
dim = (width, int(h * r))
resized = cv2.resize(image, dim, interpolation=inter)
return resized
我们修改成高度为500的大小处理图片:
image = resize(image_copy, height = 500)
1、灰度化处理:
# 灰度化处理
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
cv_show('gray',gray)

2、采用高斯滤波去噪
参考文章:
OpenCV学习笔记8-滤波器原理及代码实现
为后续Canny检测服务:
# 高斯平滑
Gaussian = cv2.GaussianBlur(gray, (5, 5), 0)
cv_show('Gaussian',Gaussian)

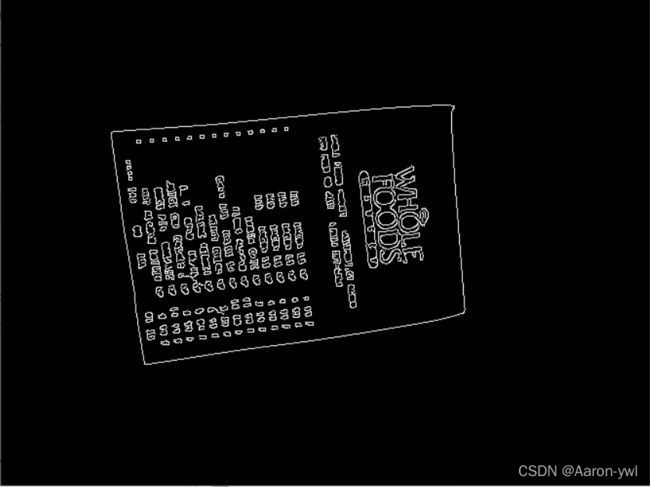
3、边缘检测
参考文章:
OpenCV学习笔记8-滤波器原理及代码实现
我们采用Canny找出信息的边缘,为后续查找轮廓做准备:
# 边缘检测,寻找边界
edged = cv2.Canny(Gaussian, 70, 200)
cv_show('edged',edged)
4、查找轮廓并排序:
参考文章:
OpenCV学习笔记10-图像轮廓的相关知识及代码实现
# 查找轮廓
cnts = cv2.findContours(edged, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)[0]
找到轮廓后,我们排序一下,为后面的透视变换和绘制轮廓做准备:
# 将轮廓按照面积降序排序
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
5、绘制全部轮廓
参考文章:
OpenCV学习笔记10-图像轮廓的相关知识及代码实现
注意绘制轮廓会对原图片进行绘制,我们copy一份:
# 绘制所有轮廓
image_contours = cv2.drawContours(image.copy(), cnts, -1, (0, 0, 255), 1)

6、多边形逼近
参考文章:
OpenCV学习笔记10-图像轮廓的相关知识及代码实现
绘制轮廓的方法有可能使得轮廓线粗糙且不平滑,我们用多边形逼近的方法去得到平滑的轮廓,只保留最有用的信息,注意也要对copy的图片进行处理。近似完后,只剩下四个顶点的角的坐标,因此下面的len(approx)=4
# 遍历轮廓找出最大的轮廓.
for c in cnts:
# 计算轮廓周长
perimeter = cv2.arcLength(c, True)
# 多边形逼近,得到近似的轮廓
approx = cv2.approxPolyDP(c, 0.02 * perimeter, True)
# 最大的轮廓
if len(approx) == 4:
# 接收approx
screen_cnt = approx
break
# 画出多边形逼近
image_screen_cnt = cv2.drawContours(image.copy(), [screen_cnt], -1, (0, 0, 255), 1)
cv_show('image_screen_cnt', image_screen_cnt)
7、仿射变换
参考文章:
OpenCV学习笔记7-图像的基本变换(附代码实现)
我们对图片进行完预处理后,得到的近似轮廓,因为我们只想处理最有用的信息,其他周围没有用的背景给它去掉,因此我们用仿射变换使得图像变正。
透视变换要找到变换矩阵,因为多边形逼近后只留下四个顶点的坐标,因此我们需要找到原图的四个坐标和仿射变换后的四个坐标。
现在已经找到了原图的4个点的坐标。需要知道变换后的4个坐标,因此我们可以对原图的四个坐标按照角点顺时针或者逆时针排序,封装成一个函数:
# 排序功能是一个独立功能,可以封装成一个函数
def order_points(pts):
# 创建全是0的矩阵, 来接收等下找出来的4个角的坐标.
rect = np.zeros((4, 2), dtype='float32')
# 列相加
s = pts.sum(axis=1)
# 左上的坐标一定是x,y加起来最小的坐标. 右下的坐标一定是x,y加起来最大的坐标.
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 右上角的x,y相减的差值一定是最小的.
# 左下角的x,y相减的差值, 一定是最大.
# diff的作用是后一列减前一列得到的差值
diff = np.diff(pts, axis=1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
找到了原图的四个角点的坐标后,计算点与点的距离,得到新的坐标,然后进行仿射变换,我们把仿射变换功能封装成一个函数:
# 把透视变换功能封装成一个函数
def four_point_transform(image, pts):
# 对输入的4个坐标排序
rect = order_points(pts)
# top_left简称tl,左上角
# top_right简称tr,右上角
# bottom_right简称br,右下角
# bottom_left简称bl,左下角
(tl, tr, br, bl) = rect
# 空间中两点的距离,并且要取最大的距离确保全部文字都看得到
widthA = np.sqrt((br[0] - bl[0]) ** 2 + (br[1] - bl[1]) ** 2)
widthB = np.sqrt((tr[0] - tl[0]) ** 2 + (tr[1] - tl[1]) ** 2)
max_width = max(int(widthA), int(widthB))
heightA = np.sqrt((tr[0] - br[0]) ** 2 + (tr[1] - br[1]) ** 2)
heightB = np.sqrt((tl[0] - bl[0]) ** 2 + (tl[1] - bl[1]) ** 2)
max_height = max(int(heightA), int(heightB))
# 构造变换之后的对应坐标位置.
dst = np.array([
[0, 0],
[max_width, 0],
[max_width, max_height],
[0, max_height]], dtype='float32')
# 计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
# 透视变换
warped = cv2.warpPerspective(image, M, (max_width, max_height))
return warped
调用仿射变换的函数:
进项仿射变换的时候,我们需要将之前的大小还原回来:
# 计算比例. 限定高度500
# 此时像素点都缩小了一定的比例,进行放射变换时要还原
ratio = image.shape[0] / 500.0
# 拷贝一份
image_copy = image.copy()
# 进行仿射变换,使图片变正
warped = four_point_transform(image_copy, cv_show('warped', warped)
拉正之后,我们通过二值化处理进行过滤信息,得到有用的信息,方便ocr的扫描和提取:
# 二值处理,先转成灰度图
warped_gray = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
# 再二值化处理
ref = cv2.threshold(warped_gray, 150, 255, cv2.THRESH_BINARY)[1]
cv_show('ref', ref)

8、写入图片文件
将处理好的文件保存下来
# 把处理好的图片写入图片文件.
_ = cv2.imwrite('./scan.jpg', ref)
9、扫描读取
我们需要导入pytesseract的工具包,进行扫描文字:
我们先打开cmd下载一下:
pip install pytesseract
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-w53h48MD-1650465136827)(D:/Desktop/%E5%A4%A7%E5%AD%A6/MSB/AIoT/python%E6%95%B0%E6%8D%AE%E5%88%86%E6%9E%90/%E6%95%B0%E6%8D%AE%E5%8F%AF%E8%A7%86%E5%8C%96%E5%88%9D%E7%BA%A7%EF%BC%88%E4%B8%80%EF%BC%89/%E4%BB%A3%E7%A0%81/image-20220420221034913.png)]](http://img.e-com-net.com/image/info8/7a1958a9b15049c1b8ff5ccd54e6c9a3.jpg)
出现这个情况不要紧,我们修改一下下载路径:
pip install --target=d:\python3.9\lib\site-packages pytesseract
具体可以查看我的这个文章:
已解决:Requirement already satisfied:xxx
pytesseract要求的image不是opencv读进来的image, 而是pillow这个包, 即PIL
所以我们要传入pillow包的图片!
页面分隔模式+OCR引擎模式可以看看我这篇文章:
OpenCV学习笔记11-Tesseract-OCR的安装和使用
- pytesseract.image_to_string(Image.open(‘图片路径’), lang='使用的语言包‘, config=‘页面分隔模式+OCR引擎模式’)
- tesseract5.0配套的traineddata文件某些语言版本不支持老版本的引擎(即oem=0)。
# pytesseract要求的image不是opencv读进来的image, 而是pillow这个包, 即PIL
text = pytesseract.image_to_string(Image.open('./scan.jpg'), lang='chi_sim+eng', config='--oem 1')
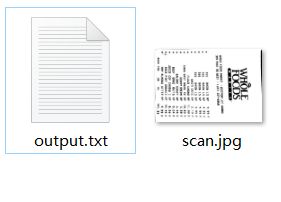
10、写入本地
# 保存到本地
with open('output.txt', 'w') as f:
print(text)
f.write(str(text))
我们可以在保存的目录下看到已保存的scan和output
查看识别结果:
eee ek RK KOK KOR KOK
WHOLE FOODS MARKET - WESTPORT,CT 06880
399 POST RD WEST - (203) 227-6858
365
365
365
365
uexH TAX
BACON LS
BACON LS
BACON LS
BACON LS
BROTH CHIC
FLOUR ALMOND
CHKN BRST BNLSS SK
HEAVY CREAM
BALSMC REDUCT
BEEF GRND 85/15
JUICE COF CASHEW C
.00
DOCS PINT ORGANIC
HNY ALMOND BUTTER
BAL
NP
NP
NP
NP
NP
NP
NP
NP
NP
NP
NP
NP
NP
4.99
4.99
4.99
4.99
2.19
11.99
18.80
3.39
6.49
5.04
8.99
194.49
9.99
101.33
ae Mees es ieee i en
呃呃呃呃呃,好像识别结果准确率不高,但是大部分还是识别出来了。
完整代码:
import cv2
import numpy as np
import pytesseract
from PIL import Image
# 显示图片
def cv_show(winname, image):
cv2.imshow(winname, image)
# 销毁窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
# 有些原图片的size不好处理,我们可以封装成一个函数来统一图片的size
# 封装resize功能.
def resize(image, width=None, height=None, inter=cv2.INTER_AREA):
dim = None # 缩放后的宽和高
(h, w) = image.shape[:2]
# 不做处理
if width is None and height is None:
return image
# 指定了resize的height
if width is None:
r = height / float(h) # 缩放比例
dim = (int(w * r), height)
# 指定了resize的width
else:
r = width / float(w)
dim = (width, int(h * r))
resized = cv2.resize(image, dim, interpolation=inter)
return resized
# 进行透视变换.
# 透视变换要找到变换矩阵
# 变换矩阵要求原图的4个点坐标和变换之后的4个点的坐标
# 现在已经找到了原图的4个点的坐标。需要知道变换后的4个坐标
# 先对获取到的4个角点按照一定顺序(顺/逆时针)排序
# 排序功能是一个独立功能,可以封装成一个函数
def order_points(pts):
# 创建全是0的矩阵, 来接收等下找出来的4个角的坐标.
rect = np.zeros((4, 2), dtype='float32')
# 列相加
s = pts.sum(axis=1)
# 左上的坐标一定是x,y加起来最小的坐标. 右下的坐标一定是x,y加起来最大的坐标.
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 右上角的x,y相减的差值一定是最小的.
# 左下角的x,y相减的差值, 一定是最大.
# diff的作用是后一列减前一列得到的差值
diff = np.diff(pts, axis=1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
# 把透视变换功能封装成一个函数
def four_point_transform(image, pts):
# 对输入的4个坐标排序
rect = order_points(pts)
# top_left简称tl,左上角
# top_right简称tr,右上角
# bottom_right简称br,右下角
# bottom_left简称bl,左下角
(tl, tr, br, bl) = rect
# 空间中两点的距离,并且要取最大的距离确保全部文字都看得到
widthA = np.sqrt((br[0] - bl[0]) ** 2 + (br[1] - bl[1]) ** 2)
widthB = np.sqrt((tr[0] - tl[0]) ** 2 + (tr[1] - tl[1]) ** 2)
max_width = max(int(widthA), int(widthB))
heightA = np.sqrt((tr[0] - br[0]) ** 2 + (tr[1] - br[1]) ** 2)
heightB = np.sqrt((tl[0] - bl[0]) ** 2 + (tl[1] - bl[1]) ** 2)
max_height = max(int(heightA), int(heightB))
# 构造变换之后的对应坐标位置.
dst = np.array([
[0, 0],
[max_width, 0],
[max_width, max_height],
[0, max_height]], dtype='float32')
# 计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
# 透视变换
warped = cv2.warpPerspective(image, M, (max_width, max_height))
return warped
# 把图像预处理的功能封装成一个函数
def Image_Pretreatment(image):
# 图片预处理
# 灰度化处理
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# cv_show('gray',gray)
# 高斯平滑
Gaussian = cv2.GaussianBlur(gray, (5, 5), 0)
# cv_show('Gaussian',Gaussian)
# 边缘检测,寻找边界(为后续查找轮廓做准备)
edged = cv2.Canny(Gaussian, 70, 200)
# cv_show('edged',edged)
# 查找轮廓
cnts = cv2.findContours(edged, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)[0]
# 将轮廓按照面积降序排序
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
# 绘制所有轮廓
image_contours = cv2.drawContours(image.copy(), cnts, -1, (0, 0, 255), 1)
# cv_show('image_contours', image_contours)
# 遍历轮廓找出最大的轮廓.
for c in cnts:
# 计算轮廓周长
perimeter = cv2.arcLength(c, True)
# 多边形逼近,得到近似的轮廓
# 近似完后,只剩下四个顶点的角的坐标
approx = cv2.approxPolyDP(c, 0.02 * perimeter, True)
# 最大的轮廓
if len(approx) == 4:
# 接收approx
screen_cnt = approx
break
# 画出多边形逼近
image_screen_cnt = cv2.drawContours(image.copy(), [screen_cnt], -1, (0, 0, 255), 1)
# cv_show('image_screen_cnt', image_screen_cnt)
# 进行仿射变换,使图片变正
warped = four_point_transform(image_copy, screen_cnt.reshape(4, 2) * ratio)
# cv_show('warped', warped)
# 二值处理,先转成灰度图
warped_gray = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
# 再二值化处理
ref = cv2.threshold(warped_gray, 150, 255, cv2.THRESH_BINARY)[1]
cv_show('ref', ref)
# 旋转变正
# dst = cv2.rotate(ref, cv2.ROTATE_90_COUNTERCLOCKWISE)
# cv_show('dst', dst)
return ref
if __name__ == "__main__":
# 读取图片
image = cv2.imread('D:/Desktop/daxue/shiyanshi/Project/OCR/images/receipt.jpg')
# 计算比例. 限定高度500
# 此时像素点都缩小了一定的比例,进行放射变换时要还原
ratio = image.shape[0] / 500.0
# 拷贝一份
image_copy = image.copy()
# 修改尺寸
image = resize(image_copy, height=500)
# cv_show('image', image)
# 返回透视变换的结果
ref = Image_Pretreatment(image)
# 把处理好的图片写入图片文件.
_ = cv2.imwrite('./scan.jpg', ref)
# pytesseract要求的image不是opencv读进来的image, 而是pillow这个包, 即PIL
text = pytesseract.image_to_string(Image.open('./scan.jpg'), lang='chi_sim+eng', config='--oem 1')
# 保存到本地
with open('output.txt', 'w') as f:
print(text)
f.write(str(text))
附OpenCV目录:OpenCV总目录学习笔记
智科专业小白,写博文不容易,如果喜欢的话可以点个赞哦!
