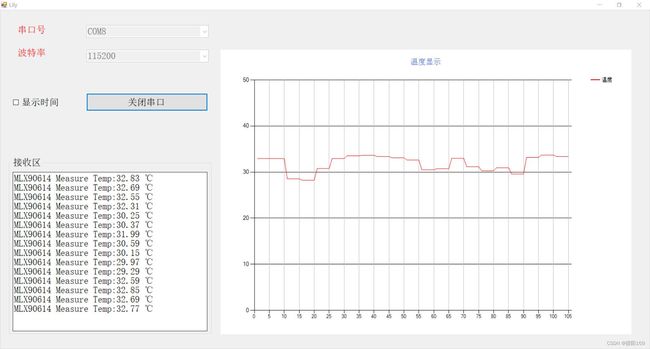
STM32F103:三.(2)红外测温(MLX90614) (带上位机显示温度曲线)
上位机显示效果:
上位机代码:
(只有一个窗口)
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using System.Threading;
using System.Windows.Forms.DataVisualization.Charting;
namespace WindowsFormsApplication1
{
public partial class Form1 : Form
{
private Queue<double> dataQueue = new Queue<double>(50);
private float Temp = 0;
private int num = 5;//每次删除增加几个点
private delegate void SafeCallDelegate(string text);
byte[] Arrive_time = new byte[3];
public Form1()
{
InitializeComponent();
InitChart();
serialPort1.Encoding = Encoding.GetEncoding("GB2312"); // 设置串口的编码
Control.CheckForIllegalCrossThreadCalls = false; // 忽略多线程
x = this.Width;
y = this.Height;
setTag(this);
//全屏窗体时内容不受任务栏影响
this.MaximizedBounds = Screen.PrimaryScreen.WorkingArea;
}
private void Form1_Load(object sender, EventArgs e)
{
for (int i = 0; i <= 10; i++)
{
comboBox1.Items.Add("COM" + i.ToString());
}
// comboBox2.Items.Add("4800");
}
private void button1_Click_1(object sender, EventArgs e)
{
//string str1;
if (open_serial_button.Text == "打开串口")/* 先判断当前串口是打开状态还是关闭状态 */
{
try
{
serialPort1.Open(); // 打开串口
//serialPort1.StopBits = StopBits.One; //使用一个停止位
//serialPort1.Parity = Parity.None;//无奇偶校验
//串口号和波特率不能修改
comboBox1.Enabled = false;
comboBox2.Enabled = false;
serial.ForeColor = Color.Red;
label2.ForeColor = Color.Red;//更改字体颜色
// serialPort1.PortName = comboBox1.Text.ToString();//传递端口号
// str1 = comboBox2.Text.ToString();
// serialPort1.BaudRate = Convert.ToInt32(str1);
open_serial_button.Text = "关闭串口";
this.timer1.Start();
}
catch
{
MessageBox.Show("端口打开错误,请检查串口", "错误");
}
}
else // 串口已经打开 需要关闭
{
try
{
serialPort1.Close(); // 关闭串口
open_serial_button.Text = "打开串口";
serial.ForeColor = Color.Black;
label2.ForeColor = Color.Black;//更改字体颜色
//串口号和波特率能修改
comboBox1.Enabled = true;
comboBox2.Enabled = true;
this.timer1.Stop();
}
catch
{
MessageBox.Show("关闭串口错误");
}
}
}
private void serialPort1_DataReceived(object sender, System.IO.Ports.SerialDataReceivedEventArgs e)
{
byte[] data = new byte[serialPort1.ReadBufferSize];//一次性读出缓冲区所有字节
serialPort1.Read(data, 0, serialPort1.ReadBufferSize);
string str = Encoding.Default.GetString(data);
显示到接收区
WriteTextSafe(str);
if (str.Contains("MLX90614"))//判断是否含有相同字符串
{
//Temperature:24 Humidity:41 例如
string result = System.Text.RegularExpressions.Regex.Replace(str, @"[^0-9]+", "");
Temp = Convert.ToInt32(result)% 10000;
Temp = Temp/100 + (float)(Temp%100/100);
Arrive_time[2] = 1;//接收到数据标志位
}
}
private void WriteTextSafe(string text)
{
string str = DateTime.Now.ToString("\r\nHH:mm:ss->");
if (this.textBox_receive.InvokeRequired)
{
var d = new SafeCallDelegate(WriteTextSafe);
if (Arrive_time[0] == 1)如果点击显示时间
{
this.Invoke(d, new object[] { str });
}
this.Invoke(d, new object[] { text });
}
else
{
textBox_receive.AppendText(text + " ");
}
}
private void OnResizeEnd(object sender, EventArgs e)
{
控件随窗体全屏显示
//float[] scale = (float[])Tag;
//int i = 2;
//foreach (Control ctrl in this.Controls)
//{
// ctrl.Left = (int)(Size.Width * scale[i++]);
// ctrl.Top = (int)(Size.Height * scale[i++]);
// ctrl.Width = (int)(Size.Width / (float)scale[0] * ((Size)ctrl.Tag).Width);//!!!
// ctrl.Height = (int)(Size.Height / (float)scale[1] * ((Size)ctrl.Tag).Height);//!!!
// //每次使用的都是最初始的控件大小,保证准确无误。
//}
}
// #region 控件大小随窗体大小等比例缩放
private float x;//定义当前窗体的宽度
private float y;//定义当前窗体的高度
private void setTag(Control cons)
{
foreach (Control con in cons.Controls)
{
con.Tag = con.Width + ";" + con.Height + ";" + con.Left + ";" + con.Top + ";" + con.Font.Size;
if (con.Controls.Count > 0)
{
setTag(con);
}
}
}
private void setControls(float newx, float newy, Control cons)
{
//遍历窗体中的控件,重新设置控件的值
foreach (Control con in cons.Controls)
{
//获取控件的Tag属性值,并分割后存储字符串数组
if (con.Tag != null)
{
string[] mytag = con.Tag.ToString().Split(new char[] { ';' });
//根据窗体缩放的比例确定控件的值
con.Width = Convert.ToInt32(System.Convert.ToSingle(mytag[0]) * newx);//宽度
con.Height = Convert.ToInt32(System.Convert.ToSingle(mytag[1]) * newy);//高度
con.Left = Convert.ToInt32(System.Convert.ToSingle(mytag[2]) * newx);//左边距
con.Top = Convert.ToInt32(System.Convert.ToSingle(mytag[3]) * newy);//顶边距
Single currentSize = System.Convert.ToSingle(mytag[4]) * newy;//字体大小
con.Font = new Font(con.Font.Name, currentSize, con.Font.Style, con.Font.Unit);
if (con.Controls.Count > 0)
{
setControls(newx, newy, con);
}
}
}
}
private void Form1_Resize(object sender, EventArgs e)
{
float newx = (this.Width) / x;
float newy = (this.Height) / y;
setControls(newx, newy, this);
}
// #endregion
//传递串口号的值
private void comboBox1_SelectedValueChanged(object sender, EventArgs e)
{
serialPort1.PortName = comboBox1.Text.ToString();
}
//传递串口波特率
private void comboBox2_SelectedValueChanged(object sender, EventArgs e)
{
string str;
str = comboBox2.Text.ToString();
serialPort1.BaudRate = Convert.ToInt32(str);
}
private void checkBox2_CheckedChanged(object sender, EventArgs e)
{
if (checkBox2.Checked == true)//发送时间
{
Arrive_time[0] = 1;
}
else if (checkBox2.Checked == false)
{
Arrive_time[0] = 0;
}
}
private void chart1_Click(object sender, EventArgs e)
{
}
private void textBox_receive_TextChanged(object sender, EventArgs e)
{
}
/*********************************************************
/// 下位机采集代码:
测试可用
MLX90614.c
/* Includes ------------------------------------------------------------------*/
#include "delay.h"
#include "MLX90614.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
#define ACK 0
#define NACK 1
#define SA 0x00 //Slave address 单个MLX90614时地址为0x00,多个时地址默认为0x5a
#define RAM_ACCESS 0x00 //RAM access command
#define EEPROM_ACCESS 0x20 //EEPROM access command
#define RAM_TOBJ1 0x07 //To1 address in the eeprom
/* -------------------------------------------------------------------------------------*/
#define SMBUS_PORT GPIOB
#define SMBUS_SCK GPIO_Pin_14
#define SMBUS_SDA GPIO_Pin_13
#define RCC_APB2Periph_SMBUS_PORT RCC_APB2Periph_GPIOB
/* -------------------------------------------------------------------------------------*/
#define SMBUS_SCK_H() SMBUS_PORT->BSRR = SMBUS_SCK
#define SMBUS_SCK_L() SMBUS_PORT->BRR = SMBUS_SCK
#define SMBUS_SDA_H() SMBUS_PORT->BSRR = SMBUS_SDA
#define SMBUS_SDA_L() SMBUS_PORT->BRR = SMBUS_SDA
#define SMBUS_SDA_PIN() SMBUS_PORT->IDR & SMBUS_SDA //读取引脚电平
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/*******************************************************************************
* Function Name : SMBus_StartBit
* Description : Generate START condition on SMBus
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void SMBus_StartBit(void)
{
SMBUS_SDA_H(); // Set SDA line
SMBus_Delay(5); // Wait a few microseconds
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(5); // Generate bus free time between Stop
SMBUS_SDA_L(); // Clear SDA line
SMBus_Delay(5); // Hold time after (Repeated) Start
// Condition. After this period, the first clock is generated.
//(Thd:sta=4.0us min)
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(5); // Wait a few microseconds
}
/*******************************************************************************
* Function Name : SMBus_StopBit
* Description : Generate STOP condition on SMBus
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void SMBus_StopBit(void)
{
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(5); // Wait a few microseconds
SMBUS_SDA_L(); // Clear SDA line
SMBus_Delay(5); // Wait a few microseconds
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(5); // Stop condition setup time(Tsu:sto=4.0us min)
SMBUS_SDA_H(); // Set SDA line
}
/*******************************************************************************
* Function Name : SMBus_SendByte
* Description : Send a byte on SMBus
* Input : Tx_buffer
* Output : None
* Return : None
*******************************************************************************/
u8 SMBus_SendByte(u8 Tx_buffer)
{
u8 Bit_counter;
u8 Ack_bit;
u8 bit_out;
for(Bit_counter=8; Bit_counter; Bit_counter--)
{
if (Tx_buffer&0x80)
{
bit_out=1; // If the current bit of Tx_buffer is 1 set bit_out
}
else
{
bit_out=0; // else clear bit_out
}
SMBus_SendBit(bit_out); // Send the current bit on SDA
Tx_buffer<<=1; // Get next bit for checking
}
Ack_bit=SMBus_ReceiveBit(); // Get acknowledgment bit
return Ack_bit;
}
/*******************************************************************************
* Function Name : SMBus_SendBit
* Description : Send a bit on SMBus 82.5kHz
* Input : bit_out
* Output : None
* Return : None
*******************************************************************************/
void SMBus_SendBit(u8 bit_out)
{
if(bit_out==0)
{
SMBUS_SDA_L();
}
else
{
SMBUS_SDA_H();
}
SMBus_Delay(2); // Tsu:dat = 250ns minimum
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(6); // High Level of Clock Pulse
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(3); // Low Level of Clock Pulse
// SMBUS_SDA_H(); // Master release SDA line ,
return;
}
/*******************************************************************************
* Function Name : SMBus_ReceiveBit
* Description : Receive a bit on SMBus
* Input : None
* Output : None
* Return : Ack_bit
*******************************************************************************/
u8 SMBus_ReceiveBit(void)
{
u8 Ack_bit;
SMBUS_SDA_H(); //引脚靠外部电阻上拉,当作输入
SMBus_Delay(2); // High Level of Clock Pulse
SMBUS_SCK_H(); // Set SCL line
SMBus_Delay(5); // High Level of Clock Pulse
if (SMBUS_SDA_PIN())
{
Ack_bit=1;
}
else
{
Ack_bit=0;
}
SMBUS_SCK_L(); // Clear SCL line
SMBus_Delay(3); // Low Level of Clock Pulse
return Ack_bit;
}
/*******************************************************************************
* Function Name : SMBus_ReceiveByte
* Description : Receive a byte on SMBus
* Input : ack_nack
* Output : None
* Return : RX_buffer
*******************************************************************************/
u8 SMBus_ReceiveByte(u8 ack_nack)
{
u8 RX_buffer;
u8 Bit_Counter;
for(Bit_Counter=8; Bit_Counter; Bit_Counter--)
{
if(SMBus_ReceiveBit()) // Get a bit from the SDA line
{
RX_buffer <<= 1; // If the bit is HIGH save 1 in RX_buffer
RX_buffer |=0x01;
}
else
{
RX_buffer <<= 1; // If the bit is LOW save 0 in RX_buffer
RX_buffer &=0xfe;
}
}
SMBus_SendBit(ack_nack); // Sends acknowledgment bit
return RX_buffer;
}
/*******************************************************************************
* Function Name : SMBus_Delay
* Description : 延时 一次循环约1us
* Input : time
* Output : None
* Return : None
*******************************************************************************/
void SMBus_Delay(u16 time)
{
delay_us(time);
}
/*******************************************************************************
* Function Name : SMBus_Init
* Description : SMBus初始化
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void SMBus_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable SMBUS_PORT clocks */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SMBUS_PORT, ENABLE);
/*配置SMBUS_SCK、SMBUS_SDA为集电极开漏输出*/
GPIO_InitStructure.GPIO_Pin = SMBUS_SCK | SMBUS_SDA;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SMBUS_PORT, &GPIO_InitStructure);
SMBUS_SCK_H();
SMBUS_SDA_H();
}
/*******************************************************************************
* Function Name : SMBus_ReadMemory
* Description : READ DATA FROM RAM/EEPROM
* Input : slaveAddress, command
* Output : None
* Return : Data
*******************************************************************************/
u16 SMBus_ReadMemory(u8 slaveAddress, u8 command)
{
u16 data; // Data storage (DataH:DataL)
u8 Pec; // PEC byte storage
u8 DataL=0; // Low data byte storage
u8 DataH=0; // High data byte storage
u8 arr[6]; // Buffer for the sent bytes
u8 PecReg; // Calculated PEC byte storage
u8 ErrorCounter; // Defines the number of the attempts for communication with MLX90614
ErrorCounter=0x00; // Initialising of ErrorCounter
slaveAddress <<= 1; //2-7位表示从机地址
do
{
repeat:
SMBus_StopBit(); //If slave send NACK stop comunication
--ErrorCounter; //Pre-decrement ErrorCounter
if(!ErrorCounter) //ErrorCounter=0?
{
break; //Yes,go out from do-while{}
}
SMBus_StartBit(); //Start condition
if(SMBus_SendByte(slaveAddress))//Send SlaveAddress 最低位Wr=0表示接下来写命令
{
goto repeat; //Repeat comunication again
}
if(SMBus_SendByte(command)) //Send command
{
goto repeat; //Repeat comunication again
}
SMBus_StartBit(); //Repeated Start condition
if(SMBus_SendByte(slaveAddress+1)) //Send SlaveAddress 最低位Rd=1表示接下来读数据
{
goto repeat; //Repeat comunication again
}
DataL = SMBus_ReceiveByte(ACK); //Read low data,master must send ACK
DataH = SMBus_ReceiveByte(ACK); //Read high data,master must send ACK
Pec = SMBus_ReceiveByte(NACK); //Read PEC byte, master must send NACK
SMBus_StopBit(); //Stop condition
arr[5] = slaveAddress; //
arr[4] = command; //
arr[3] = slaveAddress+1; //Load array arr
arr[2] = DataL; //
arr[1] = DataH; //
arr[0] = 0; //
PecReg=PEC_Calculation(arr);//Calculate CRC
}
while(PecReg != Pec); //If received and calculated CRC are equal go out from do-while{}
data = (DataH<<8) | DataL; //data=DataH:DataL
return data;
}
/*******************************************************************************
* Function Name : PEC_calculation
* Description : Calculates the PEC of received bytes
* Input : pec[]
* Output : None
* Return : pec[0]-this byte contains calculated crc value
*******************************************************************************/
u8 PEC_Calculation(u8 pec[])
{
u8 crc[6];
u8 BitPosition=47;
u8 shift;
u8 i;
u8 j;
u8 temp;
do
{
/*Load pattern value 0x000000000107*/
crc[5]=0;
crc[4]=0;
crc[3]=0;
crc[2]=0;
crc[1]=0x01;
crc[0]=0x07;
/*Set maximum bit position at 47 ( six bytes byte5...byte0,MSbit=47)*/
BitPosition=47;
/*Set shift position at 0*/
shift=0;
/*Find first "1" in the transmited message beginning from the MSByte byte5*/
i=5;
j=0;
while((pec[i]&(0x80>>j))==0 && i>0)
{
BitPosition--;
if(j<7)
{
j++;
}
else
{
j=0x00;
i--;
}
}/*End of while */
/*Get shift value for pattern value*/
shift=BitPosition-8;
/*Shift pattern value */
while(shift)
{
for(i=5; i<0xFF; i--)
{
if((crc[i-1]&0x80) && (i>0))
{
temp=1;
}
else
{
temp=0;
}
crc[i]<<=1;
crc[i]+=temp;
}/*End of for*/
shift--;
}/*End of while*/
/*Exclusive OR between pec and crc*/
for(i=0; i<=5; i++)
{
pec[i] ^=crc[i];
}/*End of for*/
}
while(BitPosition>8); /*End of do-while*/
return pec[0];
}
/*******************************************************************************
* Function Name : SMBus_ReadTemp
* Description : Calculate and return the temperature
* Input : None
* Output : None
* Return : SMBus_ReadMemory(0x00, 0x07)*0.02-273.15
*******************************************************************************/
float SMBus_ReadTemp(void)
{
float temp;
temp = SMBus_ReadMemory(SA, RAM_ACCESS|RAM_TOBJ1)*0.02-273.15;
return temp;
}
/*********************************END OF FILE*********************************/
MLX96014.h
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __MLX90614_H
#define __MLX90614_H
/* Includes ------------------------------------------------------------------*/
#include "io.h"
/* Exported types ------------------------------------------------------------*/
/* Exported variables --------------------------------------------------------*/
/* Exported constants --------------------------------------------------------*/
/* Exported macro ------------------------------------------------------------*/
/* Exported functions ------------------------------------------------------- */
void SMBus_StartBit(void);
void SMBus_StopBit(void);
void SMBus_SendBit(u8);
u8 SMBus_SendByte(u8);
u8 SMBus_ReceiveBit(void);
u8 SMBus_ReceiveByte(u8);
void SMBus_Delay(u16);
void SMBus_Init(void);
u16 SMBus_ReadMemory(u8, u8);
u8 PEC_Calculation(u8*);
float SMBus_ReadTemp(void); //获取温度值
void SMBus_DisplayTemperature(void); //在LCD第5,6页显示温度
#endif
/*********************************END OF FILE*********************************/
测试MCU :STM32F103C8T6
测试主函数
while(1)
{
fTemperature = SMBus_ReadTemp();
printf("MLX90614 Measure Temp:%.2f ℃\r\n",fTemperature);//
delay_ms(200);
}