SPI通信原理---STM32F4--HAL
SPI接口原理
SPI是一种高速全双工同步通信,在芯片管脚上占用四根线,主要应用在EEPROM、FLASH、实时时钟、AD转换器,还有数字信号处理器和数字信号解码器之间。
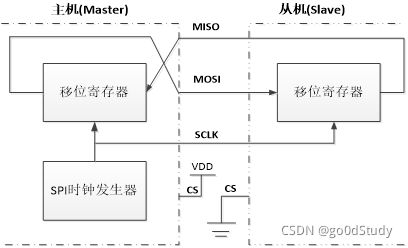
SPI接口使用4根线通信。
- MISO:主设备数据输入,从设备数据输出
- MOSI:主设备数据输出,从设备数据输入
- SCLK:时钟信号,由主设备产生
- CS:片选信号,由主设备控制
工作原理
- 主机和从机都有一个串行移位寄存器,主机通过向他的SPI串行寄存器写入一个字节来发起一次传输
- 串行移位寄存器通过MOSI信号线将字节传送给从机,从机将自己的串行移位寄存器中的内容通过MISO信号线返回给主机
- 外设的写操作和读操作都是同步完成的。如果只进行写操作,主机只需忽略接收到的字节,反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输
时钟信号的相位
SPI_CR寄存器的CPOL和CPHA位,能够组合成四种可能的时序关系,如果CPOL位为0,SCK引脚在空闲状态保持低电平,如果CPOL=1 ,SCK引脚在空闲状态下保持高电平。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样

数据帧格式
根据SPI_CR1寄存器中的LSBFIRST位,输出数据时可以MSB优先,也可以LSB优先
根据SPI_CR1寄存器的DFF位,每个数据帧可以是8位或是16位
程序配置过程
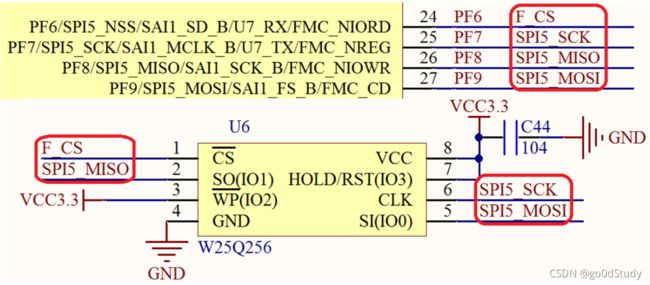
我们使用SPI和w25Q256通信,硬件连接为
- 使能SPIx和IO时钟
- 初始化IO口复用映射
- 初始化SIPx,设置SPIx工作模式
- 使能SPIx
- SPI数据传输
具体代码实现
SPI_HandleTypeDef SPI5_Handler; //SPI句柄
//以下是SPI模块的初始化代码,配置成主机模式
//SPI口初始化
//这里针是对SPI5的初始化
void SPI5_Init(void)
{
SPI5_Handler.Instance=SPI5; //SP5
SPI5_Handler.Init.Mode=SPI_MODE_MASTER; //设置SPI工作模式,设置为主模式
SPI5_Handler.Init.Direction=SPI_DIRECTION_2LINES; //设置SPI单向或者双向的数据模式:SPI设置为双线模式
SPI5_Handler.Init.DataSize=SPI_DATASIZE_8BIT; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI5_Handler.Init.CLKPolarity=SPI_POLARITY_HIGH; //串行同步时钟的空闲状态为高电平
SPI5_Handler.Init.CLKPhase=SPI_PHASE_2EDGE; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI5_Handler.Init.NSS=SPI_NSS_SOFT; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI5_Handler.Init.BaudRatePrescaler=SPI_BAUDRATEPRESCALER_256;//定义波特率预分频的值:波特率预分频值为256
SPI5_Handler.Init.FirstBit=SPI_FIRSTBIT_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI5_Handler.Init.TIMode=SPI_TIMODE_DISABLE; //关闭TI模式
SPI5_Handler.Init.CRCCalculation=SPI_CRCCALCULATION_DISABLE;//关闭硬件CRC校验
SPI5_Handler.Init.CRCPolynomial=7; //CRC值计算的多项式
HAL_SPI_Init(&SPI5_Handler);//初始化
__HAL_SPI_ENABLE(&SPI5_Handler); //使能SPI5
SPI5_ReadWriteByte(0Xff); //启动传输
}
//SPI5底层驱动,时钟使能,引脚配置
//此函数会被HAL_SPI_Init()调用
//hspi:SPI句柄
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOF_CLK_ENABLE(); //使能GPIOF时钟
__HAL_RCC_SPI5_CLK_ENABLE(); //使能SPI5时钟
//PF7,8,9
GPIO_Initure.Pin=GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9;
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //快速
GPIO_Initure.Alternate=GPIO_AF5_SPI5; //复用为SPI5
HAL_GPIO_Init(GPIOF,&GPIO_Initure);
}
先使用HAL_SPI_Init函数对SPI进行初始化,注意我们只初始化PF7、PF8、PF9,也就是SPI的SCK线,MISO线和MOSI线,CS线还没有初始化,HAL_SPI_MspInit是HAL_SPI_Init的回调函数,我们在这里初始化GPIO以及使能。上面的代码完成了第1到4步。接下来我们就可以进行数据传输了。
W25Q256
W25Q256是容量为32M字节的串行Flash芯片,它将32M的容量分为512块(Block),每个块大小为64K字节,每个块又分为16个扇区(sector),每个扇区4K字节,W25Q256最小擦除单位为一个扇区,也就是每次必须擦除4K个字节。


W25QXX_Write函数思路
- 根据要写的起始地址,确定要写的起始区域Sector号以及在起始sector中的偏移量
- 根据要写的起始地址和字节数,确定要写的数据是否跨sector
- 确定好要操作的sector以及sector的地址范围
- 对每一个sector,先遍历要写的地址区域保存的数据是不是0xFF。如果都是,就不用擦除,如果有不是0xff的区域,先读出里面的数据,保存在缓存buffer中,然后擦除里面的数据,把这个sector要操作的数据,写到缓存,最后一次性把缓存buffer写到这个对应的sector中
具体代码实现
//写SPI FLASH
//在指定地址开始写入指定长度的数据
//该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
u8 W25QXX_BUFFER[4096];
void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u32 secpos;
u16 secoff;
u16 secremain;
u16 i;
u8 * W25QXX_BUF;
W25QXX_BUF=W25QXX_BUFFER;
secpos=WriteAddr/4096;//扇区地址
secoff=WriteAddr%4096;//在扇区内的偏移
secremain=4096-secoff;//扇区剩余空间大小
//printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用
if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节
while(1)
{
W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容
for(i=0;i<secremain;i++)//校验数据
{
if(W25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除
}
if(i<secremain)//需要擦除
{
W25QXX_Erase_Sector(secpos);//擦除这个扇区
for(i=0;i<secremain;i++) //复制
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区
}else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间.
if(NumByteToWrite==secremain)break;//写入结束了
else//写入未结束
{
secpos++;//扇区地址增1
secoff=0;//偏移位置为0
pBuffer+=secremain; //指针偏移
WriteAddr+=secremain;//写地址偏移
NumByteToWrite-=secremain; //字节数递减
if(NumByteToWrite>4096)secremain=4096; //下一个扇区还是写不完
else secremain=NumByteToWrite; //下一个扇区可以写完了
}
};
}
- 根据要写的起始地址,确定要写的起始区域Sector号以及在起始sector中的偏移量
secpos=WriteAddr/4096;//扇区地址
secoff=WriteAddr%4096;//在扇区内的偏移
每个扇区的大小是4K字节,也就是4094,除以4096就得到扇区的地址,模4096就得到在扇区里面开始写的地址。
- 根据要写的起始地址和字节数,确定要写的数据是否跨扇区
secremain=4096-secoff;//扇区剩余空间大小
//printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用
if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节
secremain是扇区剩余空间大小,NumByteToWrite是要写入的字节数,如果NumByteToWrite<=secremain就不需要跨扇区。所以在后面有:
if(NumByteToWrite==secremain)break;//写入结束了
不需要跨扇区,写入结束,否则的话,就需要跨扇区,扇区号要加1,扇区偏移地址为0
secpos++;//扇区地址增1
secoff=0;//偏移位置为0
- 对每一个sector,先遍历要写的地址区域保存的数据是不是0xFF。如果都是,就不用擦除,如果有不是0xff的区域,先读出里面的数据,保存在缓存buffer中,然后擦除里面的数据,把这个sector要操作的数据,写到缓存,最后一次性把缓存buffer写到这个对应的sector中
W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容
for(i=0;i<secremain;i++)//校验数据
{
if(W25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除
}
if(i<secremain)//需要擦除
{
W25QXX_Erase_Sector(secpos);//擦除这个扇区
for(i=0;i<secremain;i++) //复制
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区
}
W25QXX_Read先保存扇区数据到W25QXX_BUF中,然后遍历剩余扇区数据有无不等于0xFF的,如果有,则调用W25QXX_Erase_Sector擦除整个扇区,然后将要写的数据线写到W25QXX_BUF中,最后一次性把W25QXX_BUF缓冲写到扇区中。
如果需要跨扇区写数据
else//写入未结束
{
secpos++;//扇区地址增1
secoff=0;//偏移位置为0
pBuffer+=secremain; //指针偏移
WriteAddr+=secremain;//写地址偏移
NumByteToWrite-=secremain; //字节数递减
if(NumByteToWrite>4096)secremain=4096; //下一个扇区还是写不完
else secremain=NumByteToWrite; //下一个扇区可以写完了
}
while会一直循环,直到写入结束了
if(NumByteToWrite==secremain)break;//写入结束了
W25QXX_Write就是在指定地址连续写入NumByteToWrite个字节数据
读取FLASH数据
//读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead)
{
u16 i;
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_ReadData); //发送读取命令
if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI5_ReadWriteByte((u8)((ReadAddr)>>24));
}
SPI5_ReadWriteByte((u8)((ReadAddr)>>16)); //发送24bit地址
SPI5_ReadWriteByte((u8)((ReadAddr)>>8));
SPI5_ReadWriteByte((u8)ReadAddr);
for(i=0;i<NumByteToRead;i++)
{
pBuffer[i]=SPI5_ReadWriteByte(0XFF); //循环读数
}
W25QXX_CS=1;
}
W25QXX_Read从ReadAddr地址连续读取NumByteToRead个字节数据
main函数
我们写入数据到FALSH中,然后读取出来在LCD上显示
//要写入到W25Q16的字符串数组
const u8 TEXT_Buffer[]={"Apollo STM32F4 SPI TEST"};
#define SIZE sizeof(TEXT_Buffer)
int main(void)
{
u8 key;
u16 i=0;
u8 datatemp[SIZE];
u32 FLASH_SIZE;
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180); //初始化延时函数
uart_init(115200); //初始化USART
LED_Init(); //初始化LED
KEY_Init(); //初始化按键
SDRAM_Init(); //初始化SDRAM
LCD_Init(); //初始化LCD
W25QXX_Init(); //W25QXX初始化
POINT_COLOR=RED;
LCD_ShowString(30,50,200,16,16,"Apollo STM32F4/F7");
LCD_ShowString(30,70,200,16,16,"SPI TEST");
LCD_ShowString(30,90,200,16,16,"ATOM@ALIENTEK");
LCD_ShowString(30,110,200,16,16,"2016/1/16");
LCD_ShowString(30,130,200,16,16,"KEY1:Write KEY0:Read"); //显示提示信息
while(W25QXX_ReadID()!=W25Q256) //检测不到W25Q256
{
LCD_ShowString(30,150,200,16,16,"W25Q256 Check Failed!");
delay_ms(500);
LCD_ShowString(30,150,200,16,16,"Please Check! ");
delay_ms(500);
LED0=!LED0; //DS0闪烁
}
LCD_ShowString(30,150,200,16,16,"W25Q256 Ready!");
FLASH_SIZE=32*1024*1024; //FLASH 大小为32M字节
POINT_COLOR=BLUE; //设置字体为蓝色
while(1)
{
key=KEY_Scan(0);
if(key==KEY1_PRES)//KEY1按下,写入W25Q128
{
LCD_Fill(0,170,239,319,WHITE);//清除半屏
LCD_ShowString(30,170,200,16,16,"Start Write W25Q256....");
W25QXX_Write((u8*)TEXT_Buffer,FLASH_SIZE-100,SIZE); //从倒数第100个地址处开始,写入SIZE长度的数据
LCD_ShowString(30,170,200,16,16,"W25Q256 Write Finished!"); //提示传送完成
}
if(key==KEY0_PRES)//KEY0按下,读取字符串并显示
{
LCD_ShowString(30,170,200,16,16,"Start Read W25Q256.... ");
W25QXX_Read(datatemp,FLASH_SIZE-100,SIZE); //从倒数第100个地址处开始,读出SIZE个字节
LCD_ShowString(30,170,200,16,16,"The Data Readed Is: "); //提示传送完成
LCD_ShowString(30,190,200,16,16,datatemp); //显示读到的字符串
}
i++;
delay_ms(10);
if(i==20)
{
LED0=!LED0;//提示系统正在运行
i=0;
}
}
}