蓝桥杯国赛复习总结
蓝桥杯国赛复习总结
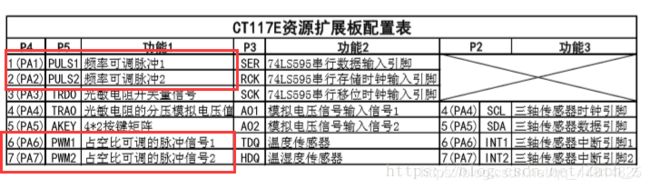
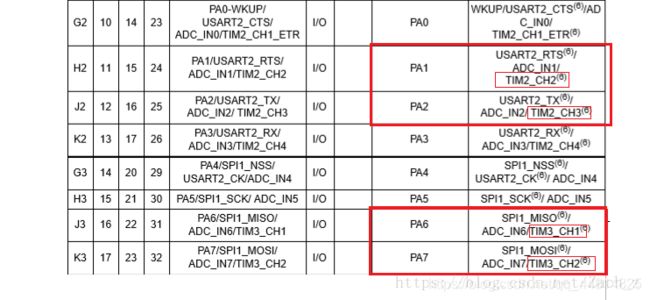
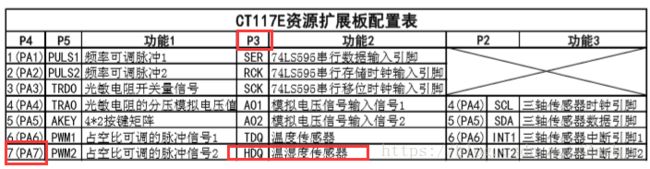
- 常用PA1引脚功能表
GPIO 功能
PA1 TIM2_CH2 / SER(74LS595串行数据输入引脚) / 频率可调脉冲
PA2 TIM2_CH3 / USART2_TX / RCK(74LS595串行存储时钟输入引脚) / 频率可调脉冲
PA3 USART2_RX / SCK(74LS595串行移位时钟输入引脚) / 光敏电阻读入引脚
PA4 ADC1_IN4 / SCL(三轴传感器时钟引脚)
PA5 ADC1_IN5 / SDA(三轴传感器数据引脚) / 4*2按键矩阵
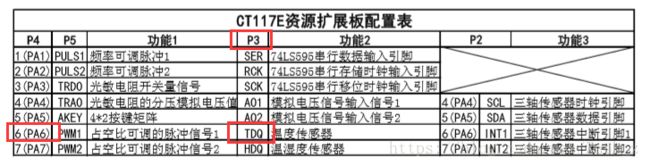
PA6 TIM3_CH1 / 占空比可调脉冲 / 温度传感器
PA7 TIM3_CH2 / 占空比可调脉冲 / 温湿度传感器
LED
- led.c
LED STM32
LED0 ~ 7 PC8 ~1 5
LE PD2
- 快速驱动
Project->STM32F10x_StdPeriph_Examples->GPIO->IOToggle"文件夹下,打开"main.c"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10|GPIO_Pin_11|GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
void LED_Con(uint16_t LED,uint16_t Status)
{
if(Status==0)
{
GPIO_SetBits(GPIOC,LED);
GPIO_SetBits(GPIOD,GPIO_Pin_2);
GPIO_ResetBits(GPIOD,GPIO_Pin_2);
}
else
{
GPIO_ResetBits(GPIOC,LED);
GPIO_SetBits(GPIOD,GPIO_Pin_2);
GPIO_ResetBits(GPIOD,GPIO_Pin_2);
}
}
- led.h
#include "stm32f10x.h"
#define LED0 GPIO_Pin_8
#define LED1 GPIO_Pin_9
#define LED2 GPIO_Pin_10
#define LED3 GPIO_Pin_11
#define LED4 GPIO_Pin_12
#define LED5 GPIO_Pin_13
#define LED6 GPIO_Pin_14
#define LED7 GPIO_Pin_15
#define LEDALL GPIO_Pin_All
void LED_Init(void);
void LED_Con(uint16_t LED,uint16_t Status);
KEY
- 引脚
- KEY STM32
KEY1 PA0
KEY2 PA8
KEY3 PB1
KEY4 PB2 - key.c
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void KEY_Scan()
{
static u16 key1_sum=0,key2_sum=0,key3_sum=0,key4_sum=0;
if(KEY1==0)
{
key1_sum++;
if(key1_sum==1)
{
}
if(key1_sum==40)//长按触发
{
key1_sum==30;//为了显示效果不断长按触发
}
}else
{
key1_sum=0;
}
if(KEY2==0)
{
key2_sum++;
if(key2_sum==1)
{
}
}else
{
key2_sum=0;
}
}
- key.h
#include "stm32f10x.h"
#define KEY1 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)
#define KEY2 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8)
#define KEY3 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)
#define KEY4 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_2)
void KEY_Init(void);
void KEY_Scan(void);
- 滴答
void SysTick_Handler(void)
{
static u8 key_sum = 0;
TimingDelay--;
if(++key_sum == 50) // 50ms
{
key_sum = 0;
KEY_Flag = 1;
}
}
- main
KEY_Init();
while(1)
{
if(KEY_Flag) //按键读取
{
KEY_Flag = 0;
KEY_Read();
}
}
- 快速驱动
- 这个没啥快速的,记住是上拉脚
LCD
STM3210B_LCD_Init();//初始化
LCD_Clear(Blue);//清屏
LCD_SetBackColor(Blue);//设置背景色,高亮用。在写字之前改色,之后在改回来
LCD_SetTextColor(White);//设置字体色
u8 string[20];//全局变量
LCD_SetBackColor(Blue);
sprintf((char*)string," measure ");//写字
LCD_DisplayStringLine(Line1,string);
sprintf((char*)string,"AO1: %.2f ",AO1);
LCD_DisplayStringLine(Line5,string);
USART驱动
![]()
- usart.c
void USART2_Init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA口时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);//使能串口2时钟
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; // 开启串口2中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级为最高
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //相应优先级为最高
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断
NVIC_Init(&NVIC_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//PA2为发送引脚,因此要配置成复用输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//PA3为接收引脚,因此要配置成浮空输入模式
USART_InitStructure.USART_BaudRate = bound; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1位停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //使能发送和接收
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init(USART2,&USART_InitStructure); //不使能硬件流控制
USART_Cmd(USART2,ENABLE); //使能串口
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); //使能接收中断
}
void USART2_SendString(u8 *str)
{
u8 index = 0;
do
{
USART_SendData(USART2,str[index]); //发送数据
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == 0); // 是否发送完成
index++;
}while(str[index] != 0);
}
- usart.h
void USART2_Init(u32 bound);
void USART2_SendString(u8 *str);
- 中断
void USART2_IRQHandler(void)
{
u8 temp;
if(USART_GetITStatus(USART2,USART_IT_RXNE) == SET)
{
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
temp = USART_ReceiveData(USART2);
if(temp == '\n')
{
RXCUNT = 0;
RXOVER = 1;
USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);
}else
{
RXBUF[RXCUNT] = temp;
RXCUNT++;
}
}
}
- main
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
USART2_Init(9600);
while(1)
{
if(RXOVER)
{
LCD_ClearLine(Line3);
LCD_DisplayStringLine(Line4, RXBUF);
USART2_SendString(RXBUF);
for(i=0;i<20;i++)
{
RXBUF[i] = 0;
}
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
RXOVER = 0;
}
}
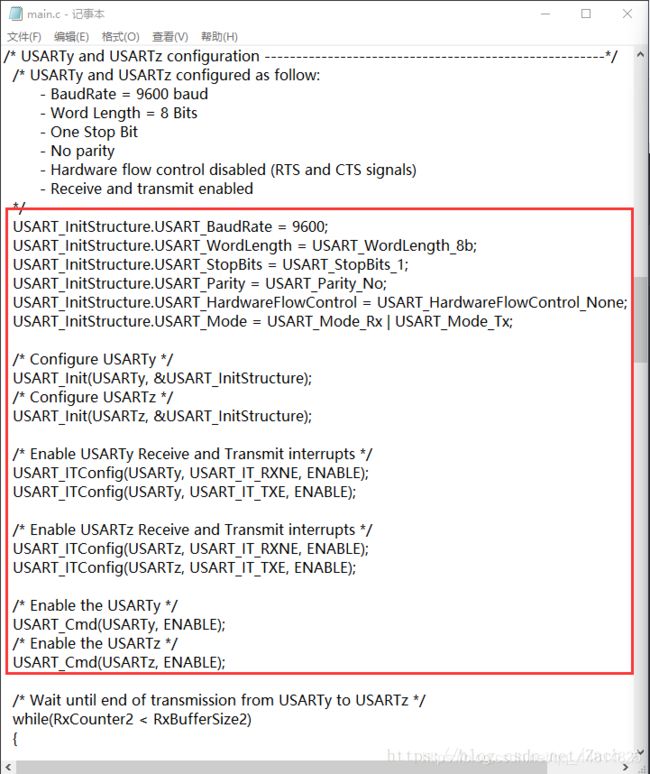
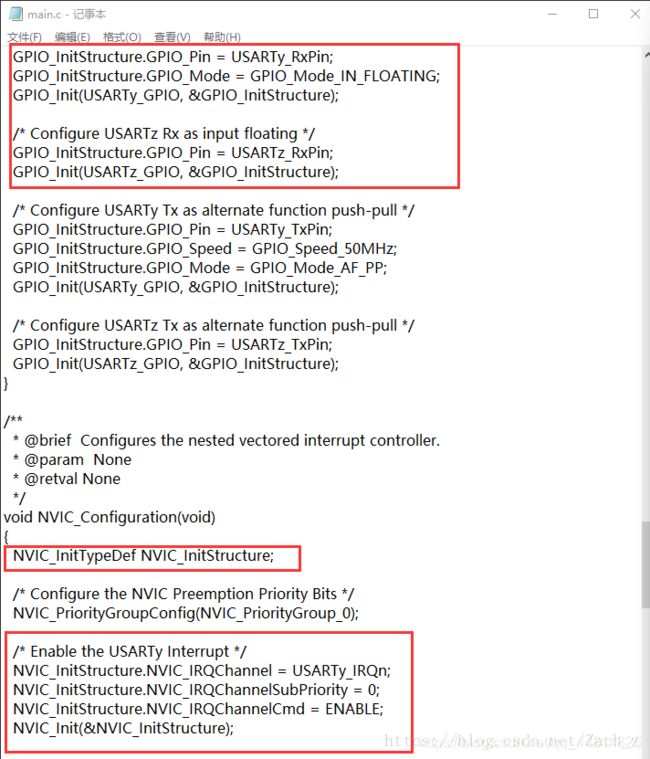
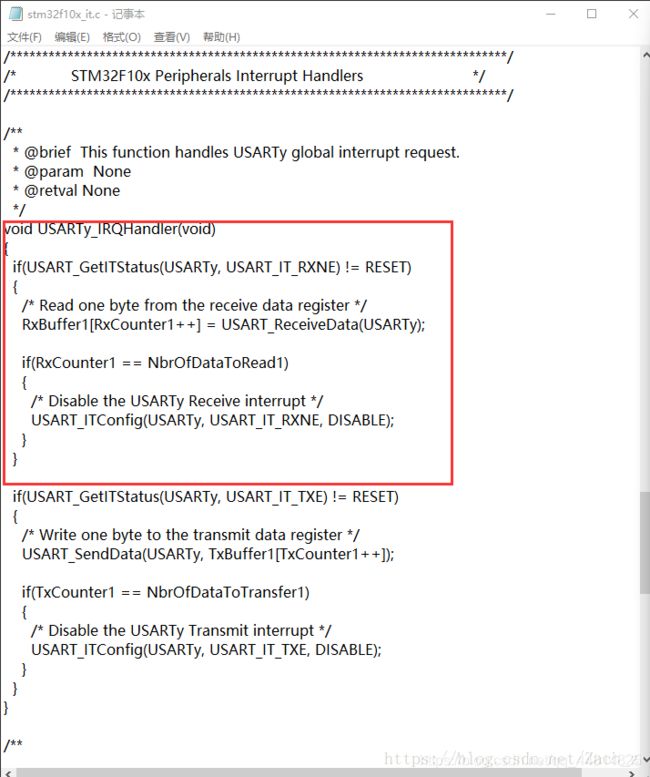
- 快速驱动
Project->STM32F10x_StdPeriph_Examples->USART->Interrupt"文件夹下,打开"main.c":
E2PROM
直接把比赛提供的"i2c.c"和"i2c.h"复制粘贴到我们工程目录里的HARDWARE文件夹里,并把i2c.c添加到工程里
- i2c_add.c
void _24C02_write(u8 address ,u8 dat)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CSendByte(dat);
I2CWaitAck();
I2CStop();
}
u8 _24C02_read(u8 address )
{
u8 temp;
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
temp= I2CReceiveByte();
I2CWaitAck();
I2CStop();
return temp;
}
- i2c_add.h
#include "stm32f10x.h"
#include "i2c.h"
void _24C02_write(u8 address ,u8 dat);
u8 _24C02_read(u8 address );
- main
i2c_init();
va1=_24C02_read(0xa1);
_24C02_write(0xa1,va1);
RTC
rtc 一定要添加那两个库文件
- rtc.c
void My_Rtc_Init(u8 HH,u8 MM,u8 SS)
{
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
BKP_DeInit();
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
RCC_LSICmd(ENABLE);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_WaitForLastTask();
RTC_ITConfig(RTC_IT_SEC, ENABLE);
RTC_WaitForLastTask();
RTC_SetPrescaler(40000-1);
RTC_WaitForLastTask();
RTC_SetCounter(3600 * HH + 60 * MM + SS);
RTC_WaitForLastTask();
}
- rtc.h
void My_Rtc_Init(u8 HH,u8 MM,u8 SS) ;
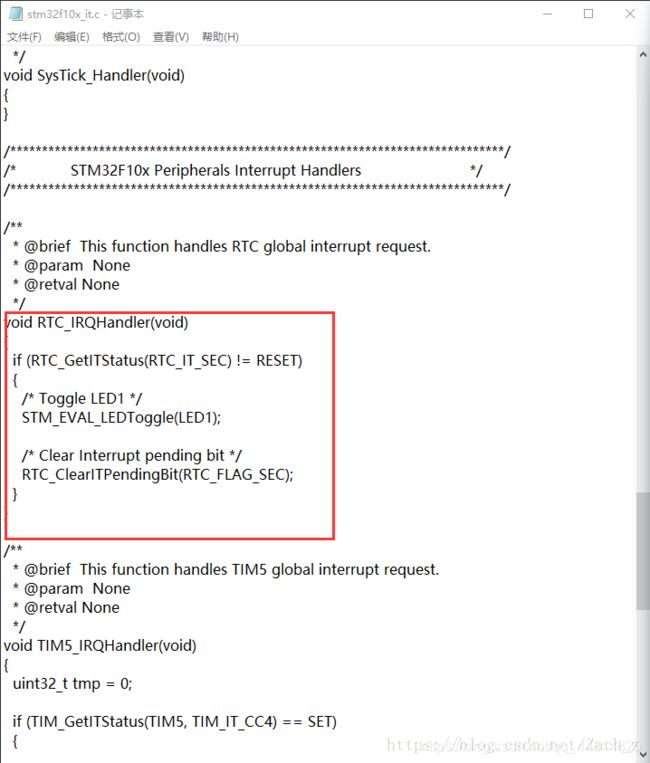
- 中断
extern u8 RTC_Flag ;
void RTC_IRQHandler(void)
{
u32 Times;
if (RTC_GetITStatus(RTC_IT_SEC) != RESET)
{
RTC_ClearITPendingBit(RTC_FLAG_SEC);
Times = RTC_GetCounter();
RTC_WaitForLastTask();
RTC_Flag = 1;
if(Times == (24 * 3600))
{
RTC_SetCounter(0);
RTC_WaitForLastTask();
}
}
}
- main
My_Rtc_Init(0,0,0);
while(1)
{
if(RTC_Flag)
{
RTC_Flag = 0;
TimeVal = RTC_GetCounter();
hour = TimeVal / 3600;
min = TimeVal % 3600 / 60;
sec = TimeVal % 3600 % 60;
}
sprintf((char*)string,"TIME:%d:%d:%d ",hour,min,sec);
LCD_DisplayStringLine(Line7,string);
}
- 快速驱动
“Project->STM32F10x_StdPeriph_Examples->RTC->LSI_Calib"文件夹下,打开"main.c”: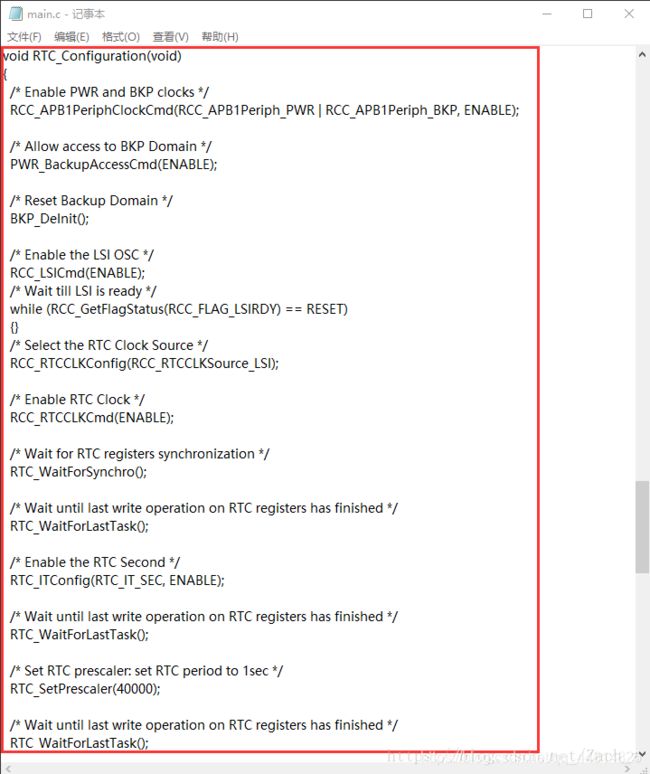
直接复制粘贴RTC_Configuration()部分,去掉最后两句代码,加上我们的计数值设定即可。
在相同目录下,打开"stm32f10x_it.c"还可以看到RTC中断函数相关代码,修改修改直接使用即可:
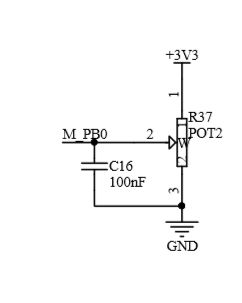
ADC
基础板上一个ADC,外接板两个ADC
- adc.c
void ADC1_Init(void)
{
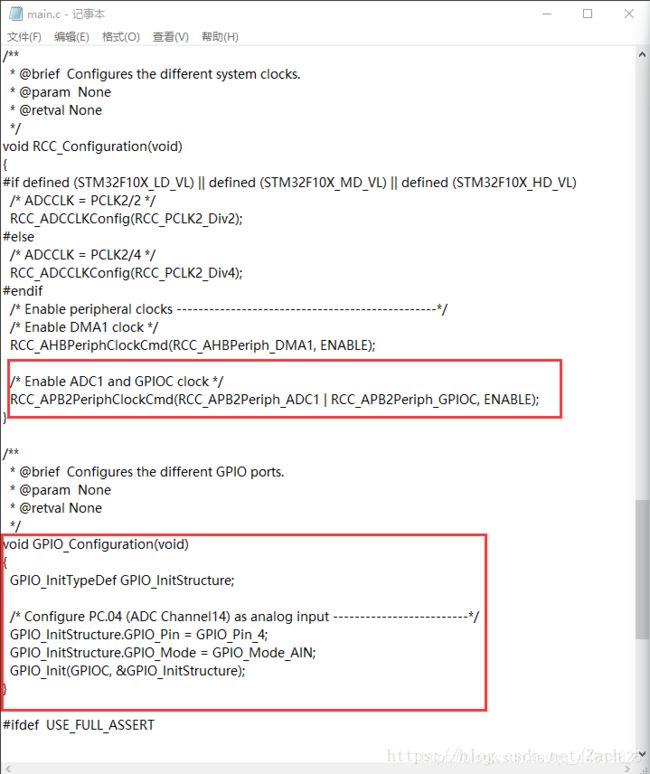
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
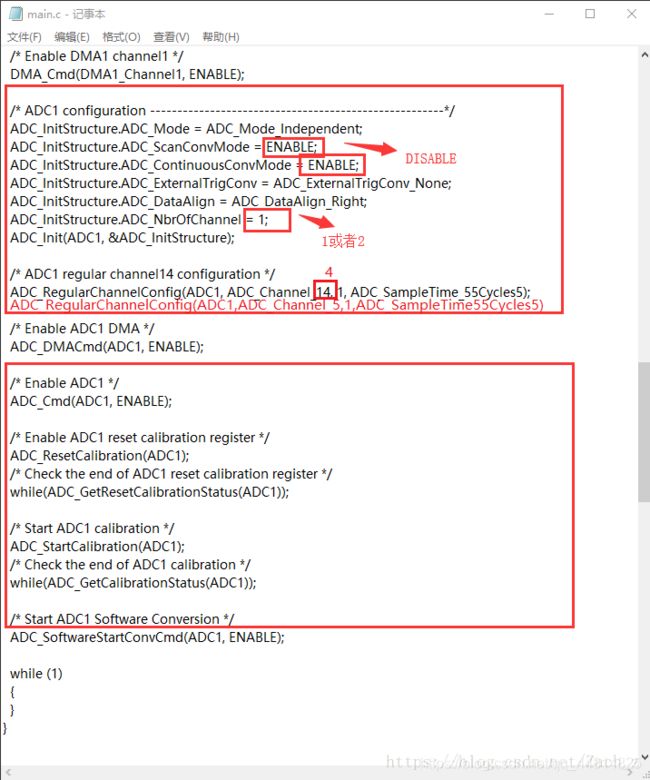
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
u16 Get_Adc(u8 channel)
{
u16 temp;
ADC_RegularChannelConfig(ADC1,channel,1,ADC_SampleTime_239Cycles5);
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)==0);
temp= ADC_GetConversionValue(ADC1);
ADC_SoftwareStartConvCmd(ADC1,DISABLE);
return temp;
}
- adc.h
#include "stm32f10x.h"
void ADC1_Init(void);
u16 Get_Adc(u8 channel);
- main
ADC1_Init();
while(1)
{
AO1=Get_Adc(4)*3.3/4096;
AO2=Get_Adc(5)*3.3/4096;
}
- 快速编写
u16 Get_Adc(u8 channel)
{
u16 temp;
ADC_RegularChannelConfig(ADC1,channel,1,ADC_SampleTime_239Cycles5); //442
ADC_SoftwareStartConvCmd(ADC1,ENABLE); //438
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)==0);//460
temp= ADC_GetConversionValue(ADC1); //444
ADC_SoftwareStartConvCmd(ADC1,DISABLE);//438
return temp;
}
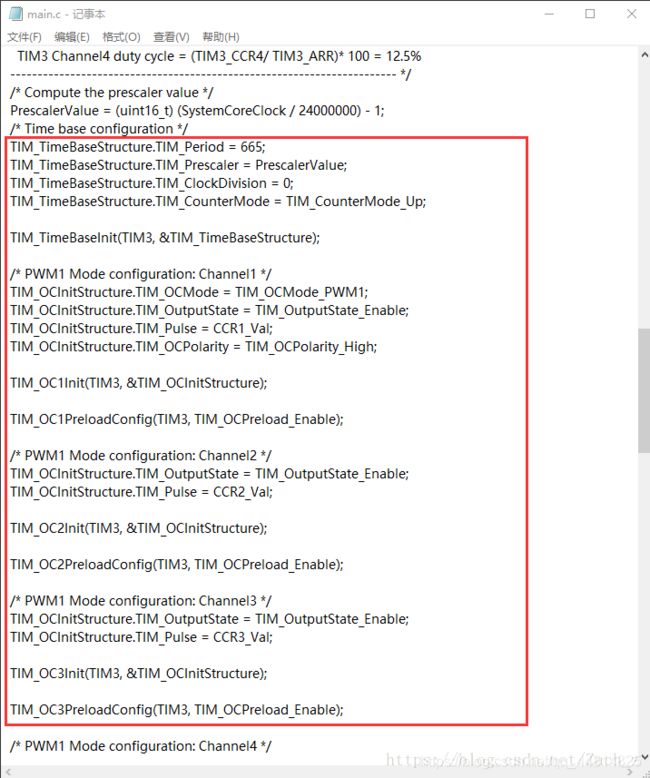
基础PWM输出
void TIM3_PWM_Init(u16 pwm_fre,u8 ch1_duty,u8 ch2_duty)
{
u16 arr;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
arr = 1000000 / pwm_fre;
TIM_TimeBaseInitStructure.TIM_Period = arr - 1; //计数值
TIM_TimeBaseInitStructure.TIM_Prescaler = 71; //分频系数 72分频
TIM_TimeBaseInitStructure.TIM_CounterMode = 0x0; //向上计数
TIM_TimeBaseInitStructure.TIM_ClockDivision = 0x0; //不分频
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = (arr - 1) * ch1_duty / 100;
TIM_OC1Init( TIM3, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = (arr - 1) * ch2_duty / 100;
TIM_OC2Init( TIM3, &TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM3, ENABLE);
TIM_Cmd( TIM3,ENABLE);
}
“Project->STM32F10x_StdPeriph_Examples->TIM->PWM_Output”
高级定时器PWM互补输出
void TIM1_PWM_Init(u16 fre,u8 duty,u8 status,u8 enable)
{
u16 frequency;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
if(status)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
frequency = 1000000 / fre;
TIM_TimeBaseInitStructure.TIM_Period = frequency - 1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 71;
TIM_TimeBaseInitStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseInitStructure.TIM_CounterMode = 0x0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
if(enable)
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
}else
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;
}
TIM_OCInitStructure.TIM_Pulse = (frequency - 1) * duty / 100;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_Low;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OC2Init(TIM1,&TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM_Cmd(TIM1, ENABLE);
}
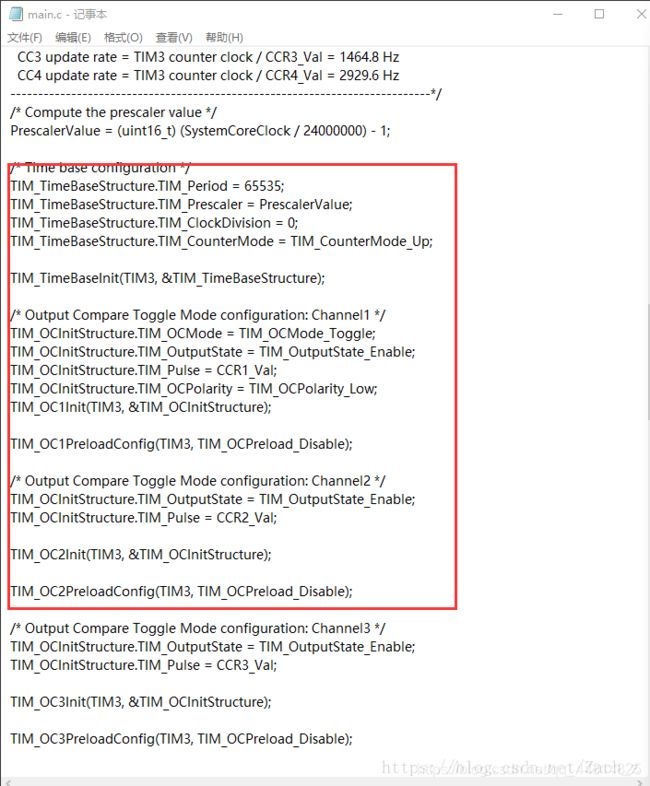
PWM比较输出
- pwm.c
extern u16 CH1_Val;
extern u16 CH2_Val;
extern u16 CH1_Duty;
extern u16 CH2_Duty;
void TIM3_PWM_OUT(u16 ch1_val,u16 ch1_duty,u16 ch2_val,u16 ch2_duty,u8 enable1,u8 enable2,u8 enable)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
CH1_Val = 1000000/ ch1_val;
CH2_Val = 1000000/ ch2_val;
CH1_Duty = CH1_Val* ch1_duty/100;
CH2_Duty = CH2_Val* ch2_duty/100;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CH1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
if(enable1)
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
}else
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
}
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CH2_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
if(enable2)
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
}else
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
}
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
// TIM_SetCounter(TIM3, 0x0);
// TIM_SetCompare1(TIM3,0x0);
// TIM_SetCompare2(TIM3,0x0);
if(enable)
{
TIM_Cmd(TIM3, ENABLE);
TIM_ITConfig(TIM3, TIM_IT_CC1 | TIM_IT_CC2 , ENABLE);
}
else
{
TIM_Cmd(TIM3, DISABLE);
TIM_ITConfig(TIM3, TIM_IT_CC1 | TIM_IT_CC2 , DISABLE);
}
}
- pwm.h
#include "stm32f10x.h"
void TIM3_PWM_OUT(u16 ch1_val,u16 ch1_duty,u16 ch2_val,u16 ch2_duty,u8 enable1,u8 enable2,u8 enable);
- 中断
u8 TIM3_CH1_Flag;
u8 TIM3_CH2_Flag;
extern u16 CH1_Val;
extern u16 CH2_Val;
extern u16 CH1_Duty;
extern u16 CH2_Duty;
void TIM3_IRQHandler(void)
{
u16 capture;
if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC1 );
capture = TIM_GetCapture1(TIM3);
if(TIM3_CH1_Flag) TIM_SetCompare1(TIM3, capture +CH1_Duty );
else TIM_SetCompare1(TIM3, capture + CH1_Val-CH1_Duty );
TIM3_CH1_Flag ^=1;
}
if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);
capture = TIM_GetCapture2(TIM3);
if(TIM3_CH2_Flag) TIM_SetCompare2(TIM3, capture + CH2_Duty );
else TIM_SetCompare2(TIM3, capture + CH2_Val-CH2_Duty );
TIM3_CH2_Flag ^=1;
}
}
- main
TIM3_PWM_OUT(1000,20,4000,40,1,1,1);
- 快速驱动
Project->STM32F10x_StdPeriph_Examples->TIM->OCToggle"文件夹下,打开"main.c":
再打开同目录下的"stm32f10x_it.h":
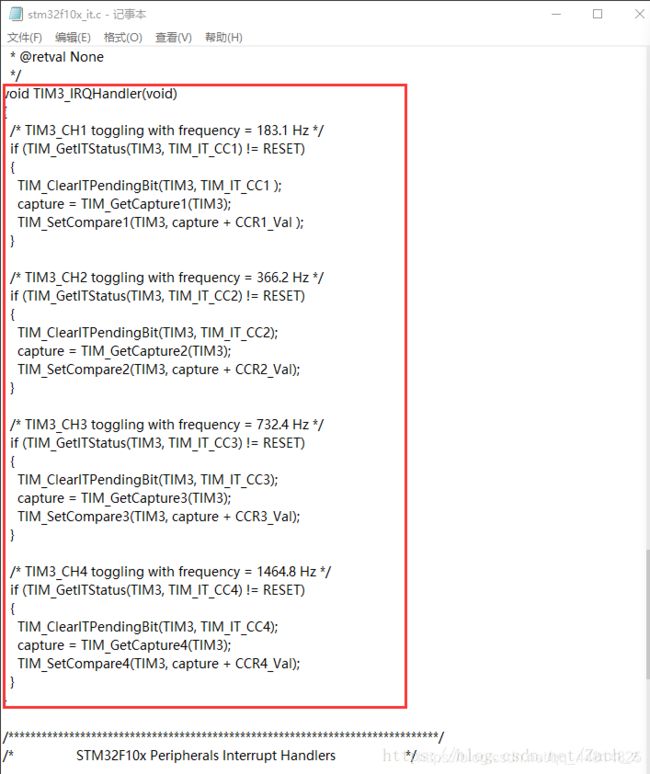
PWM比较异相输出
D = (Vo/3.3)*360°,
void TIM3_Output_Init(u16 fre,u16 deg,u8 status,u8 enable)
{
u16 phase;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
if(status)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA ,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3 ,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseInitStructure.TIM_Period = 0xffff;
TIM_TimeBaseInitStructure.TIM_Prescaler = 71;
TIM_TimeBaseInitStructure.TIM_CounterMode = 0x0;
TIM_TimeBaseInitStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
}
CH_Val = 1000000 / fre;
phase = CH_Val * deg / 360;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
if(enable)
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
}else
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
}
TIM_OCInitStructure.TIM_Pulse = CH_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
if(enable)
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
}else
{
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
}
TIM_OCInitStructure.TIM_Pulse = CH_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_SetCounter(TIM3, 0X0);
TIM_SetCompare1(TIM3, 0X0);
TIM_SetCompare2(TIM3, phase);
TIM_Cmd(TIM3,ENABLE);
TIM_ITConfig( TIM3, TIM_IT_CC1 | TIM_IT_CC2,ENABLE);
}
void TIM3_IRQHandler(void)
{
u16 capture;
if(TIM_GetITStatus(TIM3, TIM_IT_CC1) == 1)
{
TIM_ClearITPendingBit( TIM3, TIM_IT_CC1);
capture = TIM_GetCapture1(TIM3);
TIM_SetCompare1(TIM3, capture + CH_Val * 0.5);
}
if(TIM_GetITStatus(TIM3, TIM_IT_CC2) == 1)
{
TIM_ClearITPendingBit( TIM3, TIM_IT_CC2);
capture = TIM_GetCapture2(TIM3);
TIM_SetCompare2(TIM3, capture + CH_Val * 0.5);
}
}
CAPTURE
- capture.c
void TIM2_PWM_IN()
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_3;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_Cmd(TIM2, ENABLE);
TIM_ITConfig(TIM2, TIM_IT_CC2|TIM_IT_CC3, ENABLE);
}
- capture.h
#include "stm32f10x.h"
void TIM2_PWM_IN(void);
- 中断
extern u8 TIM2_CH2_CAPTURE_MODE ;
extern u32 TIM2_CH2_CAPTURE_H ;
extern u32 TIM2_CH2_CAPTURE_HL;
extern u8 TIM2_CH3_CAPTURE_MODE ;
extern u32 TIM2_CH3_CAPTURE_H ;
extern u32 TIM2_CH3_CAPTURE_HL ;
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_CC2) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
if(capture_flag)
{
switch(TIM2_CH2_CAPTURE_MODE)
{
case 0: TIM2_CH2_CAPTURE_H=0;
TIM2_CH2_CAPTURE_HL=0;
TIM2_CH2_CAPTURE_MODE=1;
TIM_OC2PolarityConfig(TIM2,TIM_OCPolarity_Low);
TIM_SetCounter(TIM2,0x0);
break;
case 1: TIM2_CH2_CAPTURE_H= TIM_GetCounter(TIM2);
TIM_OC2PolarityConfig(TIM2,TIM_OCPolarity_High);
TIM2_CH2_CAPTURE_MODE=2;
break;
case 2: TIM2_CH2_CAPTURE_HL=TIM_GetCounter(TIM2);
TIM_OC2PolarityConfig(TIM2,TIM_OCPolarity_High);
TIM2_CH2_CAPTURE_MODE=3;
break;
}
}else
{
TIM2_CH2_CAPTURE_MODE=0;
TIM_OC2PolarityConfig(TIM2,TIM_OCPolarity_High);
}
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC3) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
if(!capture_flag)
{
switch(TIM2_CH3_CAPTURE_MODE)
{
case 0: TIM2_CH3_CAPTURE_H=0;
TIM2_CH3_CAPTURE_HL=0;
TIM2_CH3_CAPTURE_MODE=1;
TIM_OC3PolarityConfig(TIM2,TIM_OCPolarity_Low);
TIM_SetCounter(TIM2,0x0);
break;
case 1: TIM2_CH3_CAPTURE_H= TIM_GetCounter(TIM2);
TIM_OC3PolarityConfig(TIM2,TIM_OCPolarity_High);
TIM2_CH3_CAPTURE_MODE=2;
break;
case 2: TIM2_CH3_CAPTURE_HL=TIM_GetCounter(TIM2);
TIM_OC3PolarityConfig(TIM2,TIM_OCPolarity_High);
TIM2_CH3_CAPTURE_MODE=3;
break;
}
}else
{
TIM2_CH3_CAPTURE_MODE=0;
TIM_OC3PolarityConfig(TIM2,TIM_OCPolarity_High);
}
}
}
- main
u16 TIM2_CH2_Fre;//全局变量
u16 TIM2_CH3_Fre;
u16 TIM2_CH2_Duty;
u16 TIM2_CH3_Duty;
u8 TIM2_CH2_CAPTURE_MODE = 0;//全局变量
u32 TIM2_CH2_CAPTURE_H = 0;
u32 TIM2_CH2_CAPTURE_HL = 0;
u8 TIM2_CH3_CAPTURE_MODE = 0;
u32 TIM2_CH3_CAPTURE_H = 0;
u32 TIM2_CH3_CAPTURE_HL = 0;
while(1)
{
if(TIM2_CH2_CAPTURE_MODE==3)
{
TIM2_CH2_Fre=1000000/TIM2_CH2_CAPTURE_HL/1000;
TIM2_CH2_Duty=TIM2_CH2_CAPTURE_H*100/TIM2_CH2_CAPTURE_HL;
TIM2_CH2_CAPTURE_MODE = 0;
}
if(TIM2_CH3_CAPTURE_MODE==3)
{
TIM2_CH3_Fre=1000000/TIM2_CH3_CAPTURE_HL/1000;
TIM2_CH3_Duty=TIM2_CH3_CAPTURE_H*100/TIM2_CH3_CAPTURE_HL;
TIM2_CH3_CAPTURE_MODE = 0;
}
}
- 快速驱动
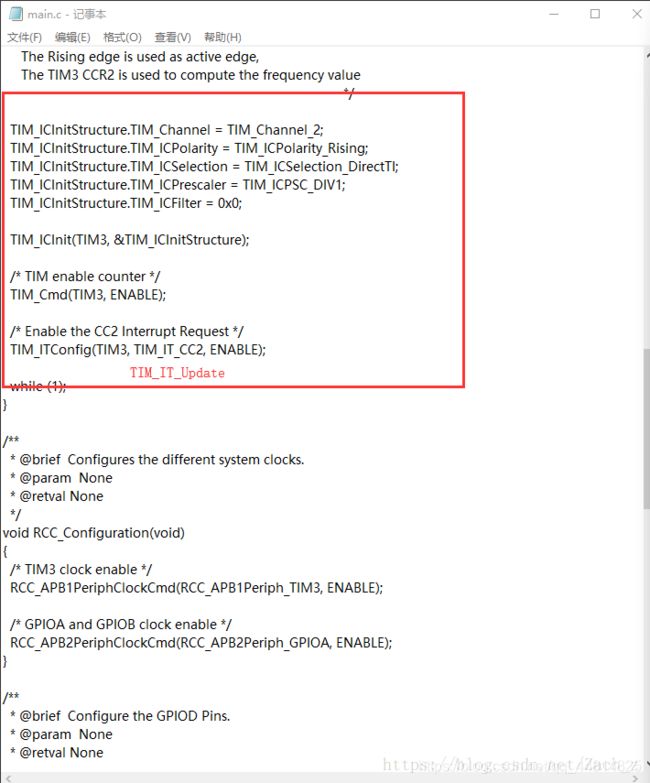
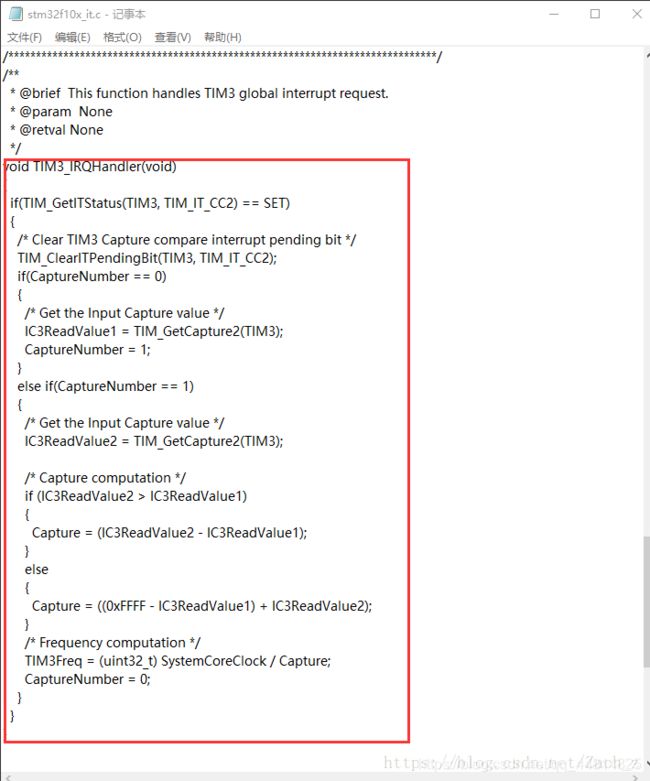
Project->STM32F10x_StdPeriph_Examples->TIM->InputCapture"文件夹下,"main.c"和"stm32f10x_it.c"分别有着输入捕获模式初始化和中断服务程序相关代码:
ds18b20
#include "ds18b20.h"
int main()
{
u32 z;
u8 str[20];
...
ds18b20_init_x();
while(1)
{
z=(ds18b20_read()&0x7ff);
LCD_ClearLine(Line0);
sprintf(str," t= %2.2f",(float)z/16.);
LCD_DisplayStringLine(Line0, str);
}
}
DHT11
#include "dht11.h"
int main()
{
u32 z;
u8 str[20];
...
dht11_init();
while(1)
{
z=dht11_read();
LCD_ClearLine(Line1);
sprintf(str1," shidu= %2d %%",z>>24);
LCD_DisplayStringLine(Line1, str1);
LCD_ClearLine(Line2);
sprintf(str1," wendu= %3d ",(z>>8)&0xff);
LCD_DisplayStringLine(Line2, str1);
delay_ms(2000);
}
}
总结
到现在为止参加的两年蓝桥杯中从大一迷茫稀里糊涂的省二,到大二可以进入国赛。
感谢自己在大一时候早早的开始学习32,希望自己能在国赛取得一个不让自己后悔的成绩