最优化笔记
最优化技术
一维搜索技术
一维无约束优化问题:min f(x)
步骤:
- 确定初始的搜索区间[a,b],在此区间是单峰区间,函数呈现”大-小-大“变化趋势
- 在搜索区间找到极小值点(试探法:黄金分割,二分,Fibonacci 插值法:牛顿插值,割线法)
进退法
- a0,h>0,令a1=a0,a2=a1+h,f1,f2
- 若f2
- 令a3=a2+h,f3=f(a3)
- 若f3>f2,结束运算,[a,b]=[a1,a3]
- 否则,加大步长继续搜索。 h=2*h,a1=a2,a2=a3,a3=a2+h
- h=-h,a1,a2=a2,a1,a3=a2+h
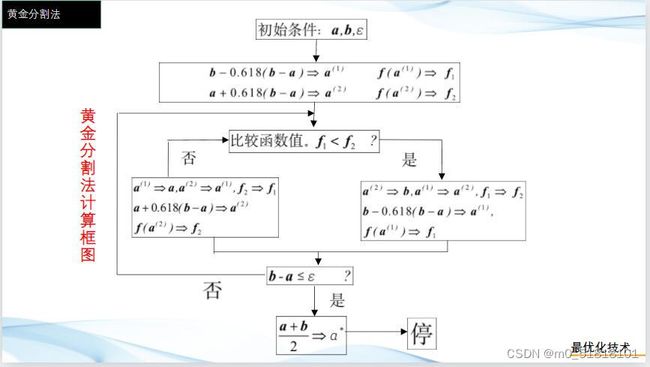
黄金分割法
步骤:
- 置初始搜索区间[a,b],并置精度要求 ϵ \epsilon ϵ,并计算左右试探点
- a1=a+0.318(b-a); a2=a+0.618(b-a)
- 比较f1和f2的大小
- 若f1>f2,极小点在[a1,b],a=a1,a1=a2,a2=a+0.618(b-a);
- 若f1<=f2,极小点在[a,a2],b=a2,a2=a1,a1=a+0.382(b-a)
- 当缩短的区间长度小于精度 ϵ \epsilon ϵ,极小点=(a+b)/2
Fibonacci法
- 与黄金分割法一致,设初始区间[a,b]有唯一的极小值点,规定一共计算n次
s . t . F N > = ( b − a ) / ϵ 取 试 探 点 x 1 = F n − 2 F n ( b − a ) + a x 2 = F n − 1 F n ( b − a ) + a s.t. F_N>=(b-a)/\epsilon \\ 取试探点 x_1=\frac{F_{n-2}}{F_n}(b-a)+a \\ x_2=\frac{F_{n-1}}{F_n}(b-a)+a s.t.FN>=(b−a)/ϵ取试探点x1=FnFn−2(b−a)+ax2=FnFn−1(b−a)+a
- 如果 f 1 < = f 2 f_1<=f_2 f1<=f2 最小值在[a, x 2 x_2 x2],b= x 2 x 2 = x 1 x_2\quad x_2=x_1 x2x2=x1 x 1 = a + F n − 2 − k F n − k k = 1 … n − 2 x_1=a+\frac{F_{n-2-k}}{F_{n-k}} \quad k=1\dots n-2 x1=a+Fn−kFn−2−kk=1…n−2
- 如果 f 1 > f 2 f_1>f_2 f1>f2,最小值在[ x 1 x_1 x1,b], a=x1,x1=x2, x 2 = a + F n − 1 − k F n − k ( b − a ) x_2=a+\frac{F_{n-1-k}}{F_{n-k}}(b-a) x2=a+Fn−kFn−1−k(b−a)
- 如果k=n-2

二分法
基本原理:
- 取具有极小点的单峰函数的搜索区间[a,b]的坐标中点 a + b 2 \frac{a+b}{2} 2a+b作为计算点,计算目标函数在该点处的导数
- 利用函数在极小点的导数为0,在其左侧为负,在其右侧为正的原理
- 若 $ f’(\frac{a+b}{2}) $ < 0 , 则搜索区间为 [ a + b 2 , b ] [\frac{a+b}{2},b] [2a+b,b]
- 若 f ′ ( a + b 2 ) f'(\frac{a+b}{2}) f′(2a+b) > 0,则搜索区间为 [ a , a + b 2 ] [a,\frac{a+b}{2}] [a,2a+b]
- 逐次迭代下去,直到搜索区间收敛到局部极小点。
计算步骤:
给定 a , b , ε 1 , ε 2 a,b,\varepsilon_1,\varepsilon_2 a,b,ε1,ε2
- 计算 α k = a + b 2 , 若 ∣ b − a ∣ < = ε 1 \alpha_k = \frac{a+b}{2},若 |b-a| <= \varepsilon_1 αk=2a+b,若∣b−a∣<=ε1,停止迭代,取得结果为 α k \alpha_k αk,停止迭代,否则下一步。
- 计算 f ′ ( α k ) , 若 f ′ ( α k ) = 0 或 者 f ′ ( α k ) < = ε 2 f'(\alpha_k),若 f'(\alpha_k) = 0 或者 f'(\alpha_k) <= \varepsilon_2 f′(αk),若f′(αk)=0或者f′(αk)<=ε2,停止迭代,否则:
- 若$f’(\alpha_k) < 0 , 则 取 [ ,则取[ ,则取[\alpha_k$,b] 转(1)
- 若 f ′ ( α k ) > 0 f'(\alpha_k)>0 f′(αk)>0,则取[ a , α k a,\alpha_k a,αk] 转(1)
牛顿插值法


梯度下降法
参考链接:
优化思想:用当前位置的负梯度方向作为搜索方向,因为该方向为当前位置的最快下降方向,最速下降法越接近目标值,步长越小,前进越慢

梯度的含义:
- 在单变量的函数当中,梯度其实就是函数的微分,代表着函数在某个给定点的切率
- 在多变量的函数当中,梯度就是一个方向,向量有方向,梯度的方向指出了函数在给定点上升最快的方向
θ 1 = θ 0 − α ∇ J ( θ ) \theta^1=\theta^0-\alpha\nabla J(\theta) θ1=θ0−α∇J(θ)
α \alpha α称之为学习率或者步长,不能太大或太小
场景分析:线性回归
用梯度下降法拟合出一条直线
首先需要定义一个代价函数,这里选用均方误差代价函数(平均误差函数)
J ( θ ) = 1 2 m ( h θ ( x ( i ) ) − y ( i ) ) 2 J(\theta)=\frac{1}{2m}(h_\theta(x^{(i)})-y^{(i)})^2 J(θ)=2m1(hθ(x(i))−y(i))2
在此公式当中
- m是数据集中数据点的个数,也就是样本数
- 1/2是一个常量,这样是为了在求梯度的时候,二次方求导下来的2就和1/2抵消了
- y是数据集中每个点真实的y坐标的值
- h是我们的预测函数,直线方程 h θ ( x ( i ) ) = θ 0 + θ 1 x 1 ( i ) h_\theta(x^{(i)})=\theta_0+\theta_1x_1^{(i)} hθ(x(i))=θ0+θ1x1(i)
共轭梯度
补充定义:
- 正定矩阵:M是n阶方阵,如果对于任何非零向量z,都有 z T M z z^{T}Mz zTMz>0,M为正定矩阵
共轭方向指的是若干个方向矢量组成的方向组,各方向有着相同的性质,它们之间存在特定的关系
x ( 1 ) 是 在 某 个 等 值 面 上 的 一 点 s ( 1 ) 是 R n 中 的 一 个 方 向 x ( 0 ) 沿 着 s ( 1 ) 以 最 优 步 长 搜 索 得 到 点 x ( 1 ) 则 S ( 1 ) 是 点 x ( 1 ) 所 在 的 等 值 面 的 切 向 量 法 向 量 为 ▽ f ( x ( 1 ) ) = A ( x ( 1 ) − x ) S ( 1 ) T ▽ f ( x ( 1 ) ) = 0 S ( 2 ) = x − x ( 1 ) s ( 1 ) T A s ( 2 ) = 0 等 值 面 上 一 点 处 的 切 向 量 与 由 这 个 点 指 向 极 小 点 的 向 量 关 于 A 共 轭 x^{(1)}是在某个等值面上的一点s^{(1)}是R^n中的一个方向 \\ x^{(0)}沿着s^{(1)}以最优步长搜索得到点x^{(1)} \\ 则S^{(1)}是点x^{(1)}所在的等值面的切向量 \\ 法向量为 \bigtriangledown f(x^{(1)})=A(x^{(1)}-x) \\ S^{(1)T} \bigtriangledown f(x^{(1)}) =0 \\ S^{(2)}=x-x^{(1)} \\ s^{(1)T}As^{(2)}=0 \\ 等值面上一点处的切向量与由这个点指向极小点的向量关于A共轭 x(1)是在某个等值面上的一点s(1)是Rn中的一个方向x(0)沿着s(1)以最优步长搜索得到点x(1)则S(1)是点x(1)所在的等值面的切向量法向量为▽f(x(1))=A(x(1)−x)S(1)T▽f(x(1))=0S(2)=x−x(1)s(1)TAs(2)=0等值面上一点处的切向量与由这个点指向极小点的向量关于A共轭
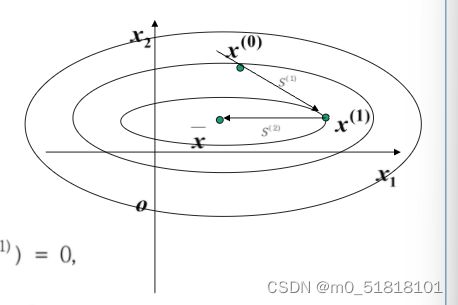
同心椭圆簇的几何性质:任意做两条平行线,与椭圆组中的两椭圆切于点 x(1),x(2) 。该两点必通过椭圆的中心;或者说,过椭圆中心做任意直线与任意两个椭圆相交,通过交点作椭圆切线必互相平行
共轭方向法对于n阶对称正定矩阵A,至多需要n次迭代就可以得到最优解
如何选取一组共轭方向?
利用已知迭代点处的梯度方向构造一组共轭方向,并且沿此方向进行搜索,求出函数的极小点
(1)搜索步长的确定
已知迭代点 x ( k ) x^{(k)} x(k)和搜索方向 d ( k ) d^{(k)} d(k),利用一维搜索确定最优步长 λ k \lambda_k λk
求 解 m i n f ( x ( k ) + λ d ( k ) ) φ ( λ ) = f ( x ( k ) + λ d ( k ) ) 令 φ ( λ ) ′ = ▽ f ( x ( k ) + λ d ( k ) ) T d ( k ) = 0 已 知 ▽ f ( x ) = A x + b 即 有 ∣ A ( x ( k ) + λ d ( k ) ) + b ∣ T d ( k ) = 0 令 g k = ▽ f ( x ( k ) ) = A x ( k ) + b , 则 有 ∣ g k + λ A d ( k ) ∣ T d ( k ) = 0 解 得 λ k = − g k T d ( k ) d ( k ) T A d ( k ) 求解min \quad f(x^{(k)}+\lambda d^{(k)}) \\ \varphi(\lambda)=f(x^{(k)}+\lambda d^{(k)}) \\ 令 \varphi(\lambda)'=\bigtriangledown f(x^{(k)}+\lambda d^{(k)})^Td^{(k)}=0 \\ 已知 \bigtriangledown f(x)=Ax+b \\ 即有 |A(x^{(k)}+\lambda d^{(k)})+b|^T d^{(k)}=0 \\ 令 g_k=\bigtriangledown f(x^{(k)})=Ax^{(k)}+b ,则有 \\ |g_k+\lambda A d^{(k)}|^Td^{(k)}=0 \\ 解得 \lambda _k=-\frac{g_k^Td^{(k)}}{d^{(k)^T}Ad^{(k)}} 求解minf(x(k)+λd(k))φ(λ)=f(x(k)+λd(k))令φ(λ)′=▽f(x(k)+λd(k))Td(k)=0已知▽f(x)=Ax+b即有∣A(x(k)+λd(k))+b∣Td(k)=0令gk=▽f(x(k))=Ax(k)+b,则有∣gk+λAd(k)∣Td(k)=0解得λk=−d(k)TAd(k)gkTd(k)
(2)搜索方向的确定
- 任意取得初始点 x ( 1 ) x^{(1)} x(1),第一个搜索方向取为 d ( 1 ) = − ▽ f ( x ( 1 ) ) d^{(1)}=-\bigtriangledown f(x^{(1)}) d(1)=−▽f(x(1));
- 设已求得点 x ( k + 1 ) , 若 ▽ f ( x ( k + 1 ) ) 不 等 于 0 , 令 x^{(k+1)},若\bigtriangledown f(x^{(k+1)}) 不等于0,令 x(k+1),若▽f(x(k+1))不等于0,令 g k + 1 = ▽ f ( x ( k + 1 ) ) g_{k+1}= \bigtriangledown f(x^{(k+1)}) gk+1=▽f(x(k+1))
则 下 一 个 搜 索 方 向 按 照 如 下 方 式 确 定 : 令 d ( k + 1 ) = − g k + 1 + β k d ( k ) 其 中 d k + 1 和 d k 关 于 A 共 轭 d ( k ) T A d ( k + 1 ) = 0 解 得 β k = d ( k ) T A g k + 1 d ( k ) T A d ( k ) 则下一个搜索方向按照如下方式确定: \\ 令 \quad d^{(k+1)}=-g_{k+1}+ \beta_k d^{(k)} \\ 其中 d^{k+1} 和 d^{k} 关于A共轭 \\ d^{(k)^T} A d^{(k+1)}=0 \\ 解得 \beta_k = \frac{d^{(k)^T}Ag_{k+1}}{d^{(k)^T}Ad^{(k)}} 则下一个搜索方向按照如下方式确定:令d(k+1)=−gk+1+βkd(k)其中dk+1和dk关于A共轭d(k)TAd(k+1)=0解得βk=d(k)TAd(k)d(k)TAgk+1
共轭梯度算法性质
对于正定二次函数 f ( x ) = 1 2 x T A x + b T + c f(x) = \frac{1}{2} x^{T} A x + b^{T} +c f(x)=21xTAx+bT+c,FR算法在n次以内搜索终止。
- 搜索方向 d ( 1 ) , d ( 2 ) , … d ( m ) d^{(1)},d^{(2)},\dots d^{(m)} d(1),d(2),…d(m)关于A共轭。
共轭梯度算法步骤(正定二次函数)
-
任取初始点 x ( 1 ) x^{(1)} x(1),精度要求 ε \varepsilon ε,令k=1
-
令 g 1 = ▽ f ( x ( 1 ) ) g_1=\bigtriangledown f(x^{(1)}) g1=▽f(x(1)),如果|| g 1 g_1 g1||< ε \varepsilon ε,停止, x ( 1 ) x^{(1)} x(1)为所求的极小点,否则,令 d ( 1 ) = − g 1 d^{(1)}=-g_1 d(1)=−g1,利用公式(3)计算 λ 1 , 令 x 2 = x 1 + λ 1 d ( 1 ) \lambda_1,令x_2=x_1+\lambda_1d^{(1)} λ1,令x2=x1+λ1d(1)
-
计算 g k + 1 , 如 果 g k + 1 小 于 精 度 , 停 止 g_{k+1},如果g_{k+1}小于精度,停止 gk+1,如果gk+1小于精度,停止
否则, 令 d ( k + 1 ) = − g k + 1 + β k d ( k ) d^{(k+1)}=-g_{k+1}+\beta_kd^{(k)} d(k+1)=−gk+1+βkd(k),其中 β k \beta_k βk用 β i = ∣ ∣ g i + 1 ∣ ∣ 2 ∣ ∣ g i ∣ ∣ 2 \beta_i=\frac{||g_{i+1}||^2}{||g_i||^2} βi=∣∣gi∣∣2∣∣gi+1∣∣2 k=k+1
-
利用公式(3)计算 λ k \lambda_k λk, 算出 x k + 1 x_{k+1} xk+1
对于一般函数,搜索步长 λ i \lambda_i λi需要一维搜索确定
注意:PPT上求解步长公式推导使用了正定二次函数性质,但方向推导没有,所以方向公式适用于一般函数。
算法在有限步迭代后不一定能满足停止条件:以n次迭代为一轮,每次完成一维搜索后,如果还没有求得极小值,则以上一轮的最后一个迭代点作为新的初始点,取最速下降方向为第一个搜索方向,开始下一轮搜索
线性规划
基本概念
在一组线性约束条件下,求解目标函数的最优解
线性规划标准形式:
- 目标函数求最大值,注意一维搜索是寻找最小值
- 所有的约束条件均由等式表示
- 每个约束条件右端常数常为非负值
- 所有决策变量为非负值
若不满足,改造方法如下:
- 若目标函数求最小值,添加负号改为求最大值
- 约束条件中,某些常数项bi为负数,则在约束条件两边乘以负号。
- 约束条件为不等式:
- <= 左边加上非负数
- >= 左边减去非负数
- 若某一变量 x j < = 0 , 则 令 x j ′ = x j x_j<=0,则令 x_j' = x_j xj<=0,则令xj′=xj
- 若某一变量无符号限制,则需要添加两个非负变量吗 V k , U k , 令 x k = V k − U k V_k ,U_k,令 x_k = V_k - U_k Vk,Uk,令xk=Vk−Uk
设线性规划约束方程组的系数矩阵 A m ∗ n A_{m*n} Am∗n的秩为m,则A中某m列组成的任一个m阶可逆矩B称之为该线性规划问题的一个基矩阵。
当Ax=b式中A确定一个基B后,与基向量 p k p_{k} pk相对于的决策变量 x k x_k xk称为关于基B的一个基变量。
设 B = p k 1 , p k 2 , … , p k m B = {p_{k1},p_{k2},\dots,p_{km}} B=pk1,pk2,…,pkm 是A中的一个基,对应的基变量为 x k 1 , x k 2 , x k 3 , … , x k m x_{k1},x_{k2},x_{k3},\dots,x_{km} xk1,xk2,xk3,…,xkm,我们称非基变量取值均为0且满足约束条件的一个解x为基B的一个基本解。
三条重要定理:
- 若线性规划问题存在可行解,则该问题的可行域是凸集。
- 线性规划问题的基本可行解X对应可行域(凸集)的顶点
- 若问题存在最优解,一定存在一个基本可行解是最优解。
单纯形法
迭代原理:
- 选择初始基,确定初始基本可行解。
- 判断当前解是否是最优解
- 将基变量用非基变量表示,并用非基变量表示目标函数
- 当目标函数中所有非基变量系数小于等于0时,才是最优解。若某一个非基变量等于0,由无穷多个最优解
- 解的改进,找出目标函数中贡献最大的非基变量,让非基变量的取值从0变为整数,即将x2从非基变量转换为基变量,称之为进基变量。再从原来基变量中选择一个离开。
- 用非基变量(此时还未替换)去表示基变量(马上有人要退出了),让进基变量从0开始增加,使得有一个基变量减少到0就停止,此时变为0的基变量称之为离基变量。
最优解判定定理
对于求最大目标函数的问题中,对于某个可行的基本可行解,所有的检验数 σ < = 0 \sigma <= 0 σ<=0,这个基本可行解才是最优解
- 当非基变量的检验数都小于0,存在唯一最优解
- 非基变量的检验数存在等于0,则有无穷多最优解
- 存在某非基变量的检验数大于0,但该变量对应的所有系数都小于等于0,是无界解。
- 添加人工变量之后,当所有的非基变量的检验数都小于等于0,而基变量中有人工变量时,则问题无可行解。
单纯形表值得注意的地方: 找出基变量找检验数最大所对应的变量,找离基变量时找对应系数最小的变量。
为了避免退化问题造成反复循环,在选出基和入基变量的时候:
- 在所有检验数大于0且相同的非基变量中,选一个下标最小的作为入基变量
- 在存在两个和两个以上相同比值时,选一个下标最小的基变量为出基变量。
动态规划
引例
任务选择问题
opt(i) 表示完成前 i 个任务的最优解
状态转移方程:
o p t [ i ] = m a x { v ( i ) + o p t [ p r e v ( i ) ] , o p t ( i − 1 ) } 终 止 条 件 : o p t [ 0 ] = 0 opt [i] = max \{v(i) + opt [prev(i)] ,opt(i-1)\} \\ 终止条件:opt[0] = 0 opt[i]=max{v(i)+opt[prev(i)],opt(i−1)}终止条件:opt[0]=0
不相邻数选择
opt[i] 表示选择前i个数的最大和
状态转移方程:
o p t [ i ] = m a x { a [ i ] + o p t [ i − 2 ] , o p t [ i − 1 ] } 出 口 : o p t [ 0 ] = a [ 0 ] , o p t [ 1 ] = m a x { a [ 0 ] , a [ 1 ] } opt[i] = max\{ a[i] + opt [i-2] , opt[i-1]\} \\ 出口: opt [0] = a[0] , opt [1] = max \{a[0] , a[1] \} opt[i]=max{a[i]+opt[i−2],opt[i−1]}出口:opt[0]=a[0],opt[1]=max{a[0],a[1]}
动态规划问题的特征
最优子结构
问题的最优解包含了其他子问题的最优解
重叠子问题
投资分配问题
将a万元分给n个工厂,xi为分给第i个工厂资金,gi(xi)为第i个工厂得到资金后提供的利润值
令 fk(x)表示将x万元资金分给前k个工厂所得到的最大利润, gk(y)表示将y万元资金分给第k个工厂所获得的利润。
状态转移方程:
f 1 ( x ) = g 1 ( x ) f k k ( x ) = m a x { f k − 1 ( x − y ) + g k ( y ) } , 其 中 0 < = y < = x f1(x) = g1(x) f_kk (x) = max \{ f_{k-1}(x-y) + gk(y) \},\quad其中 0 <= y<=x f1(x)=g1(x)fkk(x)=max{fk−1(x−y)+gk(y)},其中0<=y<=x
背包问题
有一个徒步旅行者,其可携带物品重量的限度为a 公斤,设有n 种物品可供他选择装入包中。已知每种物品的重量及使用价值(作用),问此人应如何选择携带的物品(各几件),使所起作用(使用价值)最大?
令 fk(y) 表示只带前k种物品,重量不超过y所获得的最大利润。 求解 fn(a).
状态转移方程
f k ( y ) = m a x { f k − 1 ( y − a k x k ) + c k x k } , 其 中 0 < = x k < = y a k 当 k = 1 , f 1 ( y ) = c 1 ( y 1 a 1 ) f _k (y) = max \{f_{k-1}(y-a_kx_k) + c_kx_k \}, \quad 其中 0<= x_k <= \frac{y}{a_k} \\ 当k=1,f_1(y) = c_1 (\frac{y_1}{a_1}) fk(y)=max{fk−1(y−akxk)+ckxk},其中0<=xk<=aky当k=1,f1(y)=c1(a1y1)
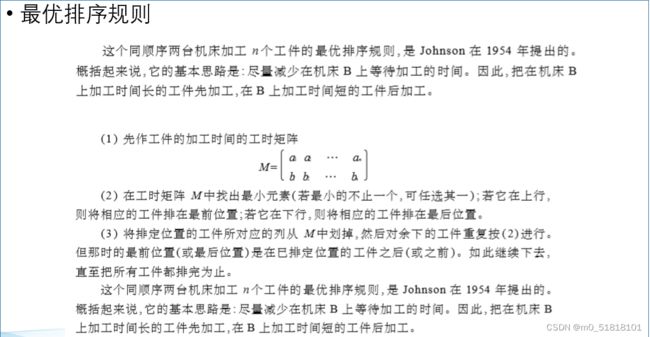
排序问题
状态变量 (X,t)
X:在机床A上等待加工的工件集合
x:不属于X的在A上最后加工完的工件
t:在A上加工完x的时刻算起到B上加工完x所需的时间
指标最优值函数:
f(X,t) : 由状态(X,t)出发,对未加工的工件采取最优加工顺序后,将X所有工件加工所需时间。
f(X,t,i):由状态(X,t)出发,在A上加工i,然后对未加工工件采取最优加工顺序后,将X中所有工件加工完所需时间
f(X,t,i,j):由状态(X,t)出发,在A上加工工件i,j,然后再对未加工工件采取最优加工顺序后,将X中所有工件加工完所需要的时间。
状态转移方程 : (X,t) ----> (X-i, z i ( t ) z_i(t) zi(t)) Zi(t)表示从 状态(X,t)出发,从A上加工完i工件时刻算起到B上加工完i工件所用的时间。
f ( X , t , i ) = { a i + f ( X / i , t − a i + b i ) t ≥ a i a i + f ( x / i , b i ) t ≤ a i f (X,t,i) = \left\{ \begin{matrix} a_i + f(X/i,t-a_i+b_i) \quad t \geq a_i\\ a_i + f(x/i,b_i) \quad t\leq a_i \end{matrix} \right. f(X,t,i)={ai+f(X/i,t−ai+bi)t≥aiai+f(x/i,bi)t≤ai
是不是看不懂?,我也是哈哈,然而看到下面你就会了,上面建议跳过,非常坑人
加工总周期 : $ T = \sum t_{Ai} + t_{Bmin}$
n × \times × 3排序问题
将 n × 3 n \times 3 n×3排序问题转换为$n \times 2 $排序问题。
just don’t bi bi. show me the example

加工总周期: T = ∑ t A i + t B m i n + t C m i n T = \sum t_{Ai} + t_{Bmin} + t_{Cmin} T=∑tAi+tBmin+tCmin
遗传算法
遗传算法是一种通过模拟自然进化 过程搜索最优解的方法
轮盘赌选择法
参考文档:https://blog.csdn.net/weixin_39068956/article/details/105121469
目的:有若干个备选方案,而且每个方案都有自己的潜力分值,但是在选择的时候并不完全按照分值的高低来选,而是有一定的概率接受,分值高的接受概率高,分值较低接受的概率也低。
思想
各个个体的被选择概率和其适应度值成比例,适应度越大,被选中的概率也就越大。
每个部分被选中的概率与其适应度成比例。设一部分x(i)的适应度表示为f(xi),被选中的概率为p(xi),累计概率为q(xi),对应的计算公式如下:
P ( x i ) = f ( x i ) ∑ j = 1 N f j q ( x i ) = ∑ j = 1 i p ( x j ) P(x_i)=\frac{f(x_i)}{\sum_{j=1}^{N}fj} \\ q(xi)=\sum_{j=1}^{i}p(x_j) P(xi)=∑j=1Nfjf(xi)q(xi)=j=1∑ip(xj)
过程
- 计算每个个体被选中的概率
- 计算每个部分的累计概率
- 随机生成一个数组m,数组中的元素取值范围在0到1之间,并将其按照从大到小的方式进行排序,若累计概率q(xi)大于数组中的元素,则个体x(i)被选中,若小于m(i),则比较下一个个体,直至选出一个个体为止。
交叉算子
参考文档:https://blog.csdn.net/u010743448/article/details/108445588
- 一点交叉
- 二点交叉
- 多点交叉
- 部分匹配交叉
部分匹配交叉(PMX)
参考文档:https://blog.csdn.net/Juuunn/article/details/108948237
保证了每个染色体中的基因仅仅出现一次,常用于旅行商和其他排序问题
- 随机选择一对染色体中几个基因的起始位置
- 交换这两组基因的位置
- 做冲突检测,根据交换的两组基因建立一个映射关系,所有冲突的基因都会经过映射,保证下一代基因无冲突
顺序交叉(OX)
- 与PMX相同,随机选择一对染色体(父代)中几个基因起止位置
- 生成一个子代,并保证子代被选中的基因的位置与父代相同
- 首先找出第一步选中的基因在另一个父代中的位置,再将其余基因按照顺序放入上一步生成的子代当中
基于位置的交叉(PBX)
在两个父代染色体中随机选择几个位置,位置可以不连续,将父代染色体1这些位置上的基因复制到子代1相同位置上,再在父代染色体2上将子代1中缺少的基因按照顺序填入。另一个子代以类似方式得到。PBX与OX的不同在于选取的位置可以不连续。
遗传算法基本思想:在求解问题时从多个解开始,然后通过一定的法则进行逐步迭代以产生新的解
基本流程
- 通过随机的方式产生若干个确定长度编码的初始群体
- 通过适应度函数对每个个体进行评价,选择适应度高的个体参与遗传操作,适应度低的被淘汰
- 经过遗传操作(复制,交叉,变异)的个体形成新的一代种群,直到满足停机准则。
- 然后将后代表现好的个体做为遗传算法的执行结果。
人工神经网络(ANN)
参考博客:https://www.cnblogs.com/mantch/p/11298290.html#:~:text=%E6%AD%A3%E5%90%91%E4%BC%A0%E6%92%AD,%28forward-propagation%29%E6%98%AF%E6%8C%87%E5%AF%B9%E7%A5%9E%E7%BB%8F%E7%BD%91%E7%BB%9C%E6%B2%BF%E7%9D%80%E4%BB%8E%E8%BE%93%E5%85%A5%E5%B1%82%E5%88%B0%E8%BE%93%E5%87%BA%E5%B1%82%E7%9A%84%E9%A1%BA%E5%BA%8F%EF%BC%8C%E4%BE%9D%E6%AC%A1%E8%AE%A1%E7%AE%97%E5%B9%B6%E5%AD%98%E5%82%A8%E6%A8%A1%E5%9E%8B%E7%9A%84%E4%B8%AD%E9%97%B4%E5%8F%98%E9%87%8F%20%28%E5%8C%85%E6%8B%AC%E8%BE%93%E5%87%BA%29%E3%80%82
概述
- 外部刺激通过神经末梢,转换为电信号,转导到神经细胞(神经元)
- 无数神经元构成神经中枢
- 神经中枢综合各种信号,对外部刺激做出反应
- 人体根据神经中枢的指令,对外部的刺激做出反应。
激活函数
功能:判断从多个神经元传递过来的信号之和是否超过阈值,不超过不做出任何反应
实例:
单位阶跃函数
输入小于等于0时,输出0;当输出大于0,输出1;
Sigmoid型函数
σ ( x ) = 1 1 + e x p ( − x ) \sigma(x)=\frac{1}{1+exp(-x)} σ(x)=1+exp(−x)1
Tanh函数
t a n h ( x ) = e x p ( x ) − e x p ( − x ) e x p ( x ) + e x p ( − x ) tanh(x)=\frac{exp(x)-exp(-x)}{exp(x)+exp(-x)} tanh(x)=exp(x)+exp(−x)exp(x)−exp(−x)
ReLU函数(常用)
R e L U ( x ) = m a x ( 0 , x ) ReLU(x)=max(0,x) ReLU(x)=max(0,x)
交叉熵损失函数
L i = − l o g ( e S y i ∑ j e s j ) L_i=-log(\frac{e^{S_{yi}}}{\sum j e^{sj}}) Li=−log(∑jesjeSyi)
注意:神经网络的激活函数必须使用非线性函数
原因:如果使用线性函数,那么不管如何加深层数,总是存在与之等效的”无隐藏层神经网络“。
人工神经网络
-
输入层:网络输入层的每个神经元代表了一个特征
-
输出层:输出层个数代表分类标签的个数(在做二分类的时候,如果采用sigmoid分类器,输出层的神经元为1个;如果采用softmax分类器,输出层神经元个数为2个)
神经网络主要用于解决监督学习中的分类问题,主要通过带标记的数据集训练神经网络,不断调节权重,使得误差最小后。利用训练好的权重对数据进行分类。
1+exp(-x)}
$$
Tanh函数
t a n h ( x ) = e x p ( x ) − e x p ( − x ) e x p ( x ) + e x p ( − x ) tanh(x)=\frac{exp(x)-exp(-x)}{exp(x)+exp(-x)} tanh(x)=exp(x)+exp(−x)exp(x)−exp(−x)
ReLU函数(常用)
R e L U ( x ) = m a x ( 0 , x ) ReLU(x)=max(0,x) ReLU(x)=max(0,x)
交叉熵损失函数
L i = − l o g ( e S y i ∑ j e s j ) L_i=-log(\frac{e^{S_{yi}}}{\sum j e^{sj}}) Li=−log(∑jesjeSyi)
注意:神经网络的激活函数必须使用非线性函数
原因:如果使用线性函数,那么不管如何加深层数,总是存在与之等效的”无隐藏层神经网络“。
人工神经网络
-
输入层:网络输入层的每个神经元代表了一个特征
-
输出层:输出层个数代表分类标签的个数(在做二分类的时候,如果采用sigmoid分类器,输出层的神经元为1个;如果采用softmax分类器,输出层神经元个数为2个)
神经网络主要用于解决监督学习中的分类问题,主要通过带标记的数据集训练神经网络,不断调节权重,使得误差最小后。利用训练好的权重对数据进行分类。