无人驾驶车辆模型预测控制_【无人驾驶】车辆运动学模型验证及其线性化、离散化...
一、车辆运动学模型验证
上一篇文章我们得到车辆的运动学模型之后,就可以通过 Carsim/Simulink 联合仿真来验证车辆运动学模型的准确性, Simulink 模型如下图,车辆轴距 L 设置为 2.6m 。

输出结果对比如下图:

function [sys,x0,str,ts,simStateCompliance] = check(t,x,u,flag)switch flag, case 0, [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes; case 1, sys=mdlDerivatives(t,x,u); case 2, sys=mdlUpdate(t,x,u); case 3, sys=mdlOutputs(t,x,u); case 4, sys=mdlGetTimeOfNextVarHit(t,x,u); case 9, sys=mdlTerminate(t,x,u); otherwise DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));endfunction [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizessizes = simsizes;sizes.NumContStates = 0;sizes.NumDiscStates = 3; %输出量X、Y、Yaw为离散量,设置为3sizes.NumOutputs = 3; %输出量数量sizes.NumInputs = 2; %输入量数量sizes.DirFeedthrough = 1;sizes.NumSampleTimes = 1;sys = simsizes(sizes);x0 = [-450;-450;0]; %初始车辆状态str = [];Ts=0.05; %采样时间ts = [Ts 0];simStateCompliance = 'UnknownSimState';function sys=mdlDerivatives(t,x,u)sys = [];function sys=mdlUpdate(t,x,u)Ts=0.05; %采样时间L=2.6; %车辆轴距sys = x+[cos(x(3));sin(x(3));tan(u(1))/L]*u(2)*Ts; %验证车辆运动学模型function sys=mdlOutputs(t,x,u)sys = [x(1);x(2);x(3)];function sys=mdlGetTimeOfNextVarHit(t,x,u)sampleTime = 1; sys = t + sampleTime;function sys=mdlTerminate(t,x,u)sys = [];背景:泰勒展开式可以看作是将一条曲线在某一点处,将其用多项式来表示,只要其一阶导、二阶导···n阶导都和原曲线相同即可。
公式:

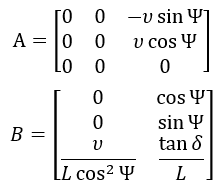
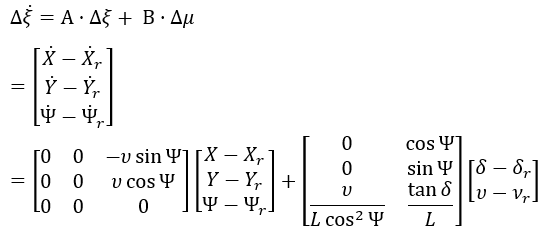
三、车辆运动学模型线性化
假设如下一阶线性微分方程



![]()

 ,因此求得:
,因此求得:
四、车辆运动学模型离散化
离散化其实也是对模型的一种简化,虽然运算数据会变得很多,但变为了离散化模型之后对非线性模型的描述也会更加贴合一些。 此处进行近似离散化,将![]()

至此完成对车辆运动学模型的离散化,依据上述公式便可以控制车辆对期望轨迹进行跟踪。
五、延伸
近似离散化、精确离散化、轨迹跟踪、路径跟踪