无人驾驶技术——雷达Clutter, CFAR,AoA
文章目录
- Clutter
-
- 杂波阈值 (Clutter Thresholding)
- 动态阈值(Clutter Thresholding)
- 知识问答
- CFAR
- CA-CFAR
- 2D CFAR
- AoA
Clutter
雷达不仅接收感兴趣物体的反射信号,还接收环境和不需要的物体的反射信号。来自这些无用源的后向散射称为杂波。
这些无用信号通常由地面、海洋、建筑物、树木、雨水、雾等的反射产生。杂波信号的大小取决于:
地面、水、雪的性质(例如沙漠的反射率较低,而冰冻雪的反射率较高)
表面光滑度
掠射角-雷达波束与地面的夹角
雷达频率

杂波阈值 (Clutter Thresholding)
为了成功地检测目标,滤除杂波是非常重要的。这在驾驶场景中非常重要,以避免车辆在没有有效目标的情况下突然刹车。当雷达探测到杂波产生的反射时,就会发生这种突然的刹车。
去除杂波的一种方法是去除多普勒速度为0的信号。由于驱动场景中的杂波通常是由静止目标造成的,因此0多普勒滤波可以帮助消除杂波。
0多普勒滤波的缺点是雷达无法探测到其路径中的静止目标。这将导致检测失败。
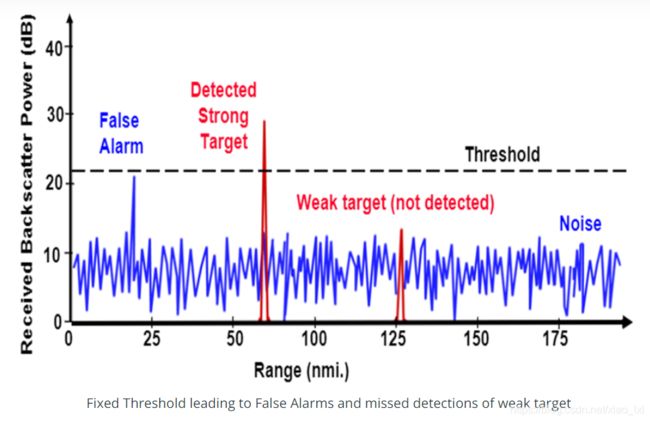
另一种技术是使用固定杂波阈值。对于固定阈值,低于阈值的信号被拒绝。使用这种方法,如果检测阈值设置得太高,将很少有错误报警,但也会掩盖有效目标。如果阈值设置得太低,则会导致太多的错误警报。换句话说,错误的警报率会太高。
误报率是雷达通过噪声或其他干扰信号检测到的错误率。它是在没有有效目标存在的情况下,对探测到的雷达目标存在的一种度量。
动态阈值(Clutter Thresholding)
杂波阈值的另一种方法是使用动态阈值。动态阈值包括改变阈值水平以降低错误的警报率。
在本课的其余部分中,您将学习一种称为cfar(恒虚警率)的动态阈值技术。利用该技术,对每一个或每组测距/多普勒站的噪声进行监测,并将信号与局部噪声水平进行比较。此比较用于创建一个阈值,该阈值保持假警报速率常数。让我们来看看下一个概念!
知识问答


CFAR
Constant False-Alarm Rate的缩写。在雷达信号检测中,当外界干扰强度变化时,雷达能自动调整其灵敏度,使雷达的虚警概率保持不变。具有这种特性的接收机称为恒虚警接收机。雷达信号的检测总是在干扰背景下进行的,这些干扰包括接收机内部的热噪声,以及地物、雨雪、海浪等杂波干扰,有时还有敌人施放的有源和无源干扰。杂波和敌人施放干扰的强度常比接收机内部噪声电平高得多。因此,在强干扰中提取信号,不仅要求有一定的信噪比,而且必须对信号作恒虚警处理。在自动检测系统中,对一定的检测门限来说,当干扰电平增大几分贝,虚警率就会大大增加,致使显示器画面饱和或计算机过载,这时即使有足够大的信噪比,也不可能做出正确的判决。为此在自动检测雷达中,必须具备恒虚警处理设备,使之在强杂波干扰下仍能继续工作。
恒虚警率的获得方法有两种:参量法和非参量法。
恒虚警率检测是雷达目标自动检测的一个重要组成部分,可以作为从SAR图像中提取目标的第一步,是进一步识别目标的基础。虚警率是指侦察设备在单位时间内将噪声或其他干扰信号误判为威胁辐射源信号的概率。而恒虚警率检测则证明了检测算法的稳定性和可靠性。

实现恒虚警率可以解决虚警问题。cfar根据车辆周围环境改变检测阈值。CFAR技术估计雷达距离和多普勒信元“训练信元”的干扰水平,在“测试信元”的一侧或两侧。然后使用估计值来确定目标是否在被测单元中(剪切)。
该过程在所有距离单元中循环,并根据噪声估计确定目标的存在。该过程的基础是,当存在噪声时,感兴趣单元周围的单元将包含对噪声的良好估计,即假定噪声或干扰是空间或暂时均匀的。从理论上讲,它将产生一个与噪声或杂波水平无关的恒定虚警率。
CFAR有多种类型:
细胞平均CFAR(CA-CFAR)
有序统计CFAR(OS CFAR)
最大最小统计(MAMIS CFAR)
以及多个CA-CFAR变体。
在这里,我们将介绍基本的CA-CFAR。
CA-CFAR
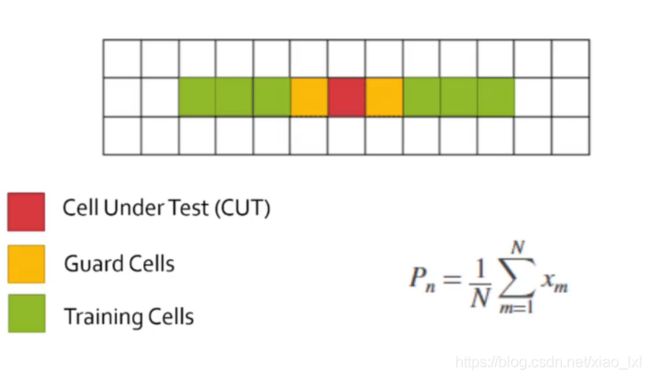
CA-CFAR是最常用的CFAR检测技术。如上一节中所述,在通过chirps实现距离和多普勒FFT时生成FFT块。CFAR过程包括一个窗口在FFT块中滑过单元。每个窗口由以下单元格组成。
被测信元:通过比较信号水平与噪声估计值(阈值)来检测目标存在的信元。
训练单元:在训练单元上测量噪音水平。训练单元可分为两个区域,一个是落后于切割的单元,称为落后训练单元,另一个是领先于切割的单元,称为领先训练单元。通过对训练单元下的噪声进行平均来估计噪声。在某些情况下,取超前或滞后单元平均值,而在另一种情况下,结合超前和滞后单元平均值,并考虑两者中较高者作为噪声级估计值。
训练单元的数量应根据环境决定。如果是密集的交通情况,则应使用较少的训练单元,因为密集的目标可能会影响噪声估计。
保护单元(Guard Cell):紧邻切割的单元被指定为保护单元。保护单元的目的是避免目标信号泄漏到训练单元中,从而对噪声估计产生不利影响。保护单元的数量应根据被测单元的目标信号泄漏情况来确定。如果目标反射很强,通常会进入周围的垃圾桶。
阈值因子(偏移):使用偏移值来缩放噪声阈值。如果信号强度以对数形式定义,则将该偏移值添加到平均噪声估计中,否则将其相乘。

% Implement 1D CFAR using lagging cells on the given noise and target scenario.
% Close and delete all currently open figures
close all;
% Data_points
Ns = 1000;
% Generate random noise
s=randn(Ns,1);
%Targets location. Assigning bin 100, 200, 300 and 700 as Targets with the amplitudes of 8, 9, 4, 11.
s([100 ,200, 300, 700])=[8 9 4 11];
%plot the output
plot(s);
% TODO: Apply CFAR to detect the targets by filtering the noise.
% 1. Define the following:
% 1a. Training Cells
% 1b. Guard Cells
T = 12
G = 12;
% Offset : Adding room above noise threshold for desired SNR
offset=3;
% Vector to hold threshold values
threshold_cfar = [];
%Vector to hold final signal after thresholding
signal_cfar = [];
% 2. Slide window across the signal length
for i = 1:(Ns-(G+T))
% 2. - 5. Determine the noise threshold by measuring it within the training cells
noise_level = sum(s(i:i+T-1));
threshold = (noise_level /T) * offset;
threshold_cfar = [threshold_cfar, {threshold}];
signal = s(i+T+G);
if (signal < threshold)
signal = 0;
end
% 6. Measuring the signal within the CUT
% 8. Filter the signal above the threshold
signal_cfar = [signal_cfar, {signal}];
end
% plot the filtered signal
plot (cell2mat(signal_cfar),'g--');
% plot original sig, threshold and filtered signal within the same figure.
figure,plot(s);
hold on,plot(cell2mat(circshift(threshold_cfar,G)),'r--','LineWidth',2)
hold on, plot (cell2mat(circshift(signal_cfar,(T+G))),'g--','LineWidth',4);
legend('Signal','CFAR Threshold','detection')

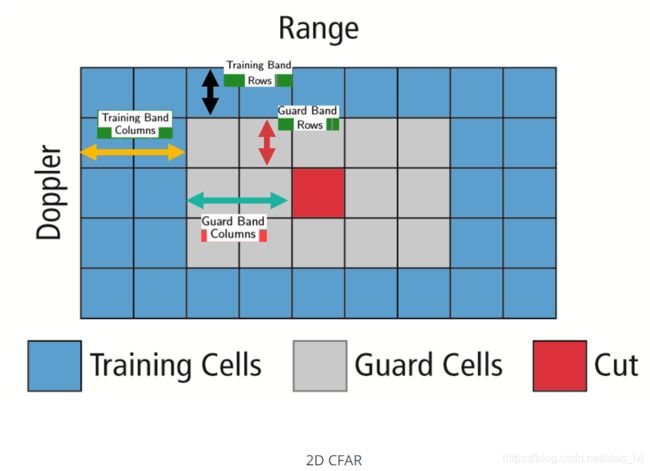
2D CFAR
二维CFAR类似于一维CFAR,但在距离多普勒块的两个维度中都实现了。二维CA-CFAR的实现包括训练单元占用测试单元周围的单元,中间有一个防护网格,以防止目标信号对噪声估计的影响。
二维CFAR步骤
您还不需要实现一个二维CFAR,但您将实现一个二维CFAR的范围多普勒输出为您的最终项目!以下步骤可用于在Matlab中实现二维CFAR:
1.确定每个维度tr和td的训练单元数。同样,选择保护单元gr和gd的数量。
2. 在整个单元矩阵上滑动被测单元(切割)
3. 选择包含训练、防护和测试单元的网格。网格大小=(2tr+2gr+1)(2td+2gd+1)。
4.保护区和被测单元中的单元总数。(2GR+1)(2GD+1)。
5.给定的训练单元:(2tr+2gr+1)(2td+2gd+1)-(2gr+1)(2gd+1)
6..测量并平均所有训练单元的噪音。这给出了阈值
7.将偏移量(如果为信号强度,单位为dB)添加到阈值,以将错误警报保持在最小值。
8.确定被测单元的信号电平。
9.如果clutter信号电平大于阈值,则指定值1,否则等于零。
10.由于被测单元不在边缘,由于训练单元占据边缘,我们将边缘抑制为零。任何既不是1也不是0的单元格值,请为其赋值为零。
AoA
Angle of Arrival,到达角。
相控阵天线是以电子方式将波束导向所需方向的天线阵列。如果阵列中的每个天线元件都受到具有特定相位值的信号的激励,则阵列将控制波束。这种现象称为光束扫描。

为了使天线波束转向所需的方向,移相器被编程为具有恒定的相位增量。如果天线由六个辐射元件组成,并且在给定方向上控制光束所需的相位增量为15度,则以下是每个元件的相位值[0,15,30,45,60,75]。增量相移以及天线元件之间的间距(d)使用以下公式确定天线的转向角.
当雷达通过按设定的角度操纵光束扫描周围环境时,它可以感知返回信号的角度。这有助于雷达对环境产生空间感知。

当雷达通过控制光束以编程角度扫描周围环境时,它可以测量空间上不同角度目标反射信号的信噪比。这有助于创建雷达空间感知的到达角与信噪比网格。
