Coursera 多伦多自动驾驶课程之行为规划behaviour planning(处理一个具有动态障碍物的路口场景)
Coursera 多伦多自动驾驶课程之行为规划behaviour planning(处理一个具有动态障碍物的路口场景)
参考Coursera上多伦多大学self-driving car 自动驾驶课程4.5.3
截取关键的PPT翻译并加上自己的理解,作为自己学习的笔记,也可供大家共同交流学习。
Page1 学习目标
-回顾带有动态障碍物的路口
-建立包含动态障碍物的状态机
-理解处理带有动态障碍物的复杂度以及边缘案例
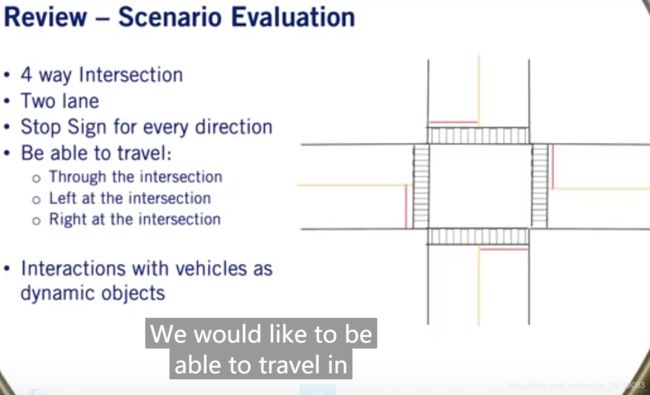
Page2 回顾-场景评估
路口有四个通道
每个通道有两个车道
每个方向都有停止线
要完成路口的直行/左转/右转
路口有动态障碍物-其他车辆
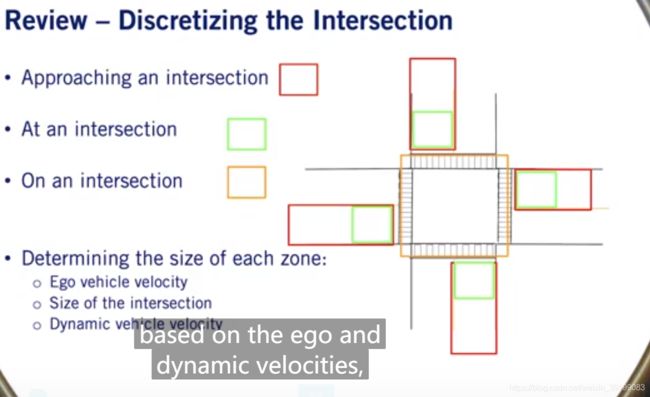
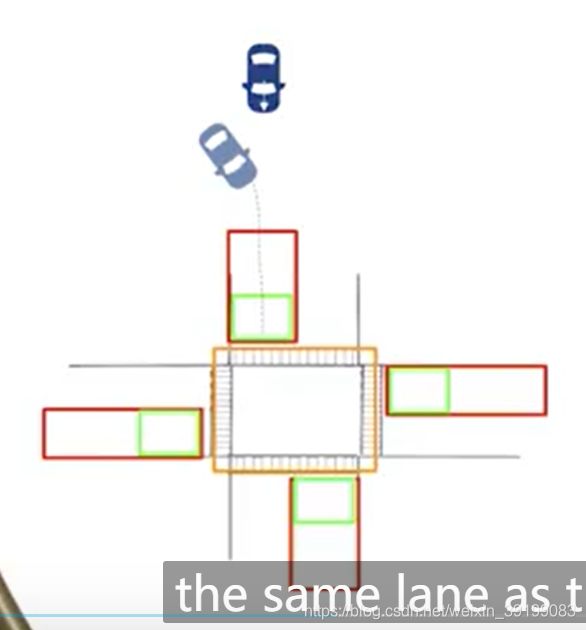
Page3 回顾-路口区域划分
如图划分为路口的接近区(红色),停止区(绿色),路口区(橙色)
决定每个区域的尺寸:
ego车车速
路口本身的尺寸
动态汽车障碍物的速度
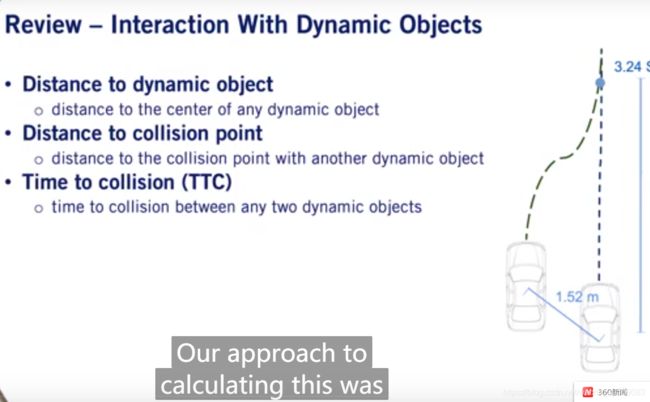
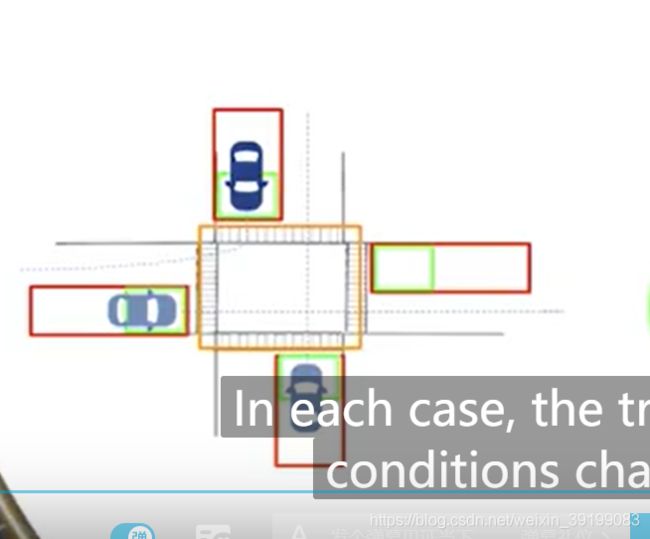
Page4回顾-具有动态障碍物的路口
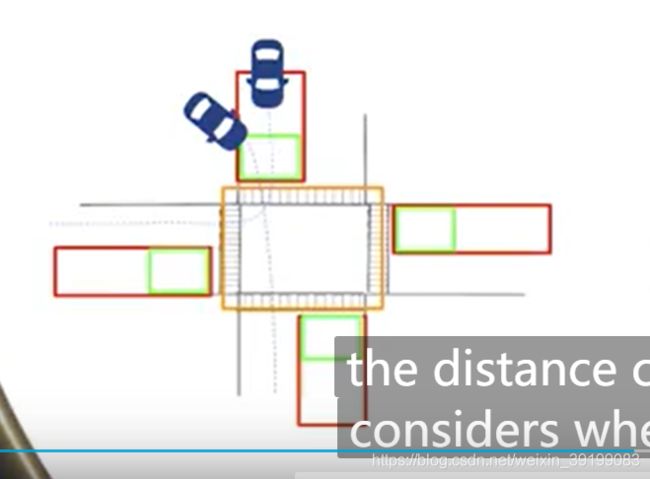
-距动态障碍物的距离
都是中心与中心的距离,如图
到碰撞点的距离
到和动态障碍物碰撞点的距离
碰撞时间TTC
两个动态物体的碰撞时间
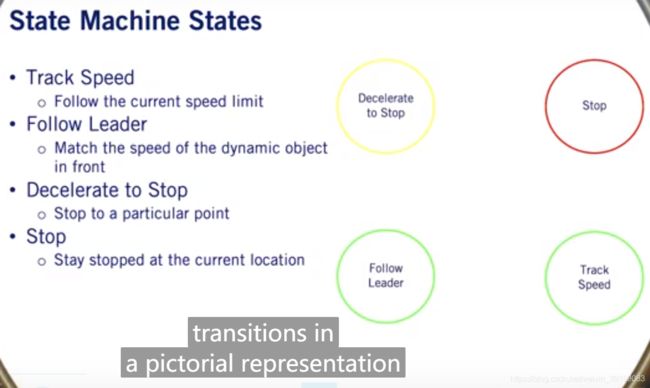
首先状态机相比之前的不具有动态障碍物的路口场景,增加了一个跟随前车的状态
前方突然有车,没到接近区,TTC碰撞时间小于跟踪阈值,从速度跟踪变成前车跟踪状态
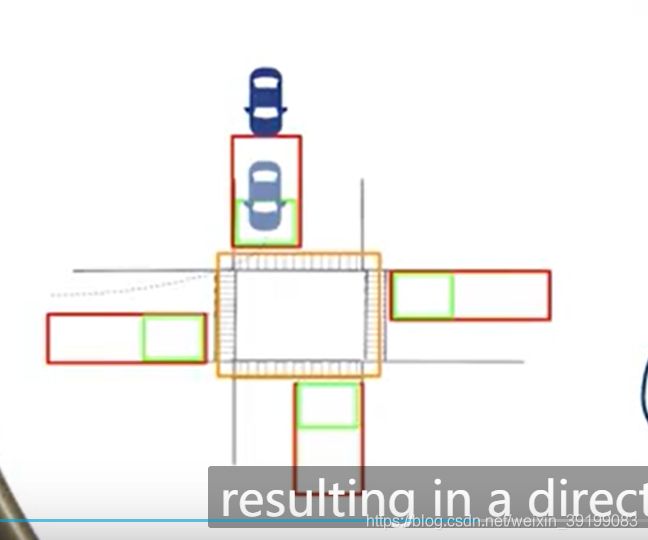
前方突然有车,到达接近区,TTC碰撞时间小于跟踪阈值,从跟车变成刹停状态
极端案例
若车辆已经在接近区开始刹停,同样进行碰撞检测,一旦TTC小于阈值进入跟车模式。
一旦车辆停止在路口的停车线前。为了简单起见,我们将采用一种非常保守的驾驶方式,自动驾驶汽车会等到所有车辆都驶过接近、交叉口或交叉口区域后才能通过。
此外,我们将定义直线交叉口的简单检查,用四个简单的标签标识所有车辆的行驶方向,并且只考虑其他车辆直行交叉口。
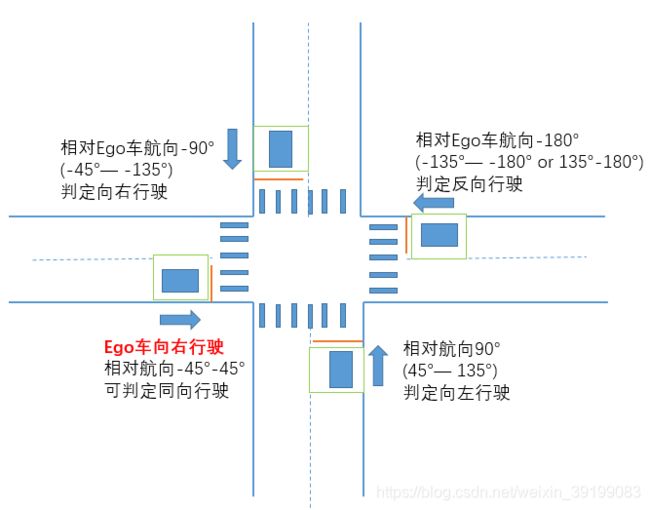
简单标签标识车辆行驶方向
使用动态对象的预测路径可以改进这种简化,特别是如果可以使用额外的感知信息来改进通过交叉口的行驶方向的预测。
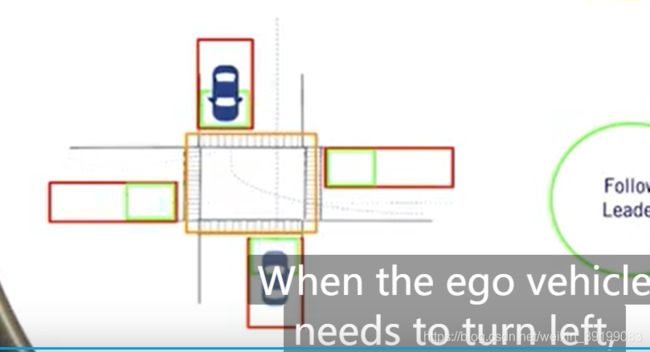
当ego车辆需要左转时,任何从左侧、右侧接近的车辆或任何迎面而来的车辆必须在ego车辆行驶前驶离交叉口区域。此时ego车在上方车道
当车辆需要直行时,只有从左侧或右侧接近的车辆才需要驶离交叉口。
最后,当ego车辆需要右转时,只有从左侧接近的车辆需要驶离交叉口。

生成的完整状态机包括状态和转换。虽然由于我们所依赖的过于简单化,这种状态机无法用于真正的自主车辆,但它很好地演示了将给定的操作设计域转换为功能有限状态机的过程。
在创建状态机的过程中,我们对动态对象的行为做出了一个特别有力的假设。也就是说,所有动态对象都遵守道路规则。然而,情况并非总是如此,这种困难导致许多edge case也需要考虑:
1.第一个例子是当一个司机无意中转向迎面而来的ego车辆,进入ego车辆的车道。
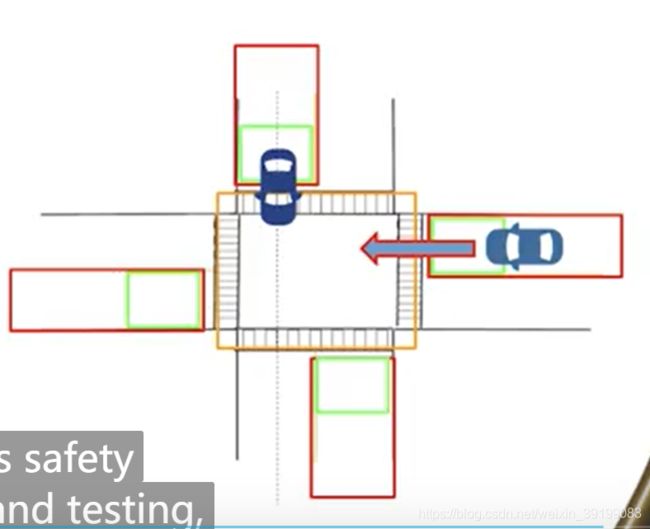
2.一个aggressive的司机在一个十字路口疾驰而过,甚至当ego车已经开始驶过十字路口时。
3.另一个常见的例子是,当其他车辆在交叉口没有停住车越过了停止线才停下时。最后,我将以一辆停在十字路口附近的车辆作为结束。如果此车辆未标记为已停放,因此它可能被视为静态对象而不是动态对象,则我们的行为规划器可能会陷入死锁状态,等待此停放的车辆移动。
这并不是所有可能性的完整集合,行为安全评估和测试的主要目标之一是尽可能多地揭示意外行为的变化,以便它们也可以被检测、分类并纳入行为规划设计过程。然而,仅仅揭露edge case是不够的。相反,我们必须定义自动驾驶汽车应该如何应对每一种情况。为此,需要紧急机动,如急转弯或急刹车,需要更多的过渡和条件来确定。这是一个活跃的研究和开发领域,
如果你想了解更多,我们在补充材料中加入了一些额外的资源。
总之,在今天的视频中,我们学习了如何创建一个有限状态机,能够与遵循规则的动态对象进行交互。通过观察动态对象可以创建的许多可能的边缘情况中的一些,我们了解了为什么处理动态对象如此具有挑战性。在下一课中,我们将了解如何继续构建能够同时处理多个场景的行为规划器。我们下次见