智能机器人-(三)轮式,足式机器人的基本概念
文章目录
- 一、机器人的移动方式设计
- 二、足式移动机器人
-
- 1.足的规模
- 2.足的稳定性
- 3.足的自由度
- 4.足行步态
- 5.动力学考虑
- 6.平衡控制
- 7.常见足式机器人实例
- 8.静态步行与动态步行
- 9.ZMP行走模型
- 三、轮式机器人
-
- 1.轮子结构
- 2.轮式移动平台的特征
- 3.轮子的部署
- 四、移动机器人的空间坐标变换
一、机器人的移动方式设计
仿生足式机器人:点/面接触大,动静态稳定,爬坡/跨越障碍做功大,控制复杂度高。
人工轮式机器人:点接触,硬地板平面移动,动静态稳定,做功小,控制复杂度低。
二、足式移动机器人
1.足的规模

足数目越少,运动模式越复杂。
2.足的稳定性
静态稳定至少需要三条腿
(动态稳定)行进间稳定至少需要四条腿
3.足的自由度
足式机器人向前迈动至少需要2个自由度
一个对应抬起,一个对应摆动(x,z)
但只有两个自由度,在多个方向上的自由滑动是不可行的,因此多数情况下每条腿需要三个自由度。
踝关节是四个自由度
通过控制脚底板姿态,更好与地板接触,改善行走能力
增加运动自由度随之会增加控制设计的复杂度
毛虫利用液压使各退伸展,每个腿只有一个自由度
人腿有7个以上自由度,15个以上肌肉群。
4.足行步态
支持状态:腿处于支持状态时,腿的末端与地面接触,支持机器人的部分重量,并且能够通过蹬腿使机器人的重心移动。
转移状态:处于转移状态时,腿悬空,不和地面接触,向前或向后摆动。
步态:机器人各条腿的支持状态与转移状态随着时间变化的顺序集合。
周期步态:对于匀速前进的机器人,步态呈周期性变化。
实时步态:机器人能够根据传感器获取地面状况和自身的姿态,进而产生实时的步态。
对于多足移动机器人,存在运动时腿的协调或步态控制问题。其步态数目依赖于腿的数目。
对单条腿而言,步态是抬起与放下事件的序列,对于一个具有K条腿的的移动机器人,步行机器可能事件的总数N为

5.动力学考虑
传输代价:机器人行走一段距离所消耗的能量
大部分能量损失在腿的运动,启停间,加速和减速交叉阶段频繁能量传递,无法全部回收。
通过弹簧能储能元件减少能量消耗。
6.平衡控制
静态平衡,机器人的质心始终位于地面上的脚构成的支撑区域上,或是当两只脚都在地面上时的组合支撑区域上。
动态平衡,在步态的某个阶段,机器人的质心可能在脚的支撑区域外,典型的算法有:
零力矩点(ZMP)
倒立摆
神经网络
PID控制
7.常见足式机器人实例
双足仿人机器人智能行走系统
人体在行走的过程中,其重心不断地周期性移动和改变,在任何时刻至少有一只脚与地面接触,而其中一段是两只脚同时着地。单支撑和双支撑交替进行,但只有单支撑和双支撑在行走周期中所占比例合理,才能保持身体平衡。
双足行走周期的三个阶段:
1.单脚支撑阶段,摆腿阶段
2.双脚支撑阶段
3.移动过渡阶段
8.静态步行与动态步行
当机器人做静态步行运动时,身体的各个部分运动速度很小,机器人的整体稳定性较易控制。
如果机器人采用的是一种高速运动的步行方式,则称之为动态步行。
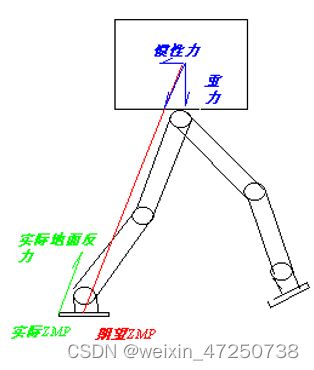
9.ZMP行走模型
重力和惯性力构成机器人的广义力,广义力的延长线落在地面上的点,即为期望的ZMP,对该点的广义力矩为零。
如果作用在机器人脚底的实际地面反力中心与期望ZMP重合,并落在支撑面上,则对于机器人无翻转力矩,从而使机器人处于稳定行走状态。
如果不重合则可能存在翻转力矩。
零力矩点(ZMP)和CoP(压力中心)是评价双足机构行走稳定性的重要参数。
支撑多边形
对于单腿支撑,支撑多边形就是支撑腿的足底接触面
对于双腿支撑,分为两种情况
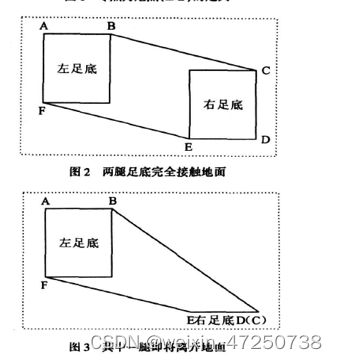
零力矩点始终落在支撑多边形内而不能落到边缘之外。
可以利用传感器检测ZMP的位置与支撑多边形边界进行比较判断行走是否趋于稳定。
当双足机构处于动态平衡时,ZMP和脚底所受地面反力的压力中心CoP时重合的。
在机器人脚掌放置FSR,用于测算实际行走中的ZMP。

计算整个机器人系统的实际ZMP按以下公式:

式子中X1、X2、Y1、Y2分别为左右脚ZMP点在参考坐标系中的坐标。Fz1、Fz2分别为左右脚4个压力传感器计算出的竖直方向的合力。
ZMP(零力矩点)控制是目前应用比较成功的双足机器人平衡理论,它要求ZMP点必须位于支撑面内。
根据任务要求设计双足机器人结构,得到重力的大小,再由运动轨迹规划确定重力的位置和惯性力,计算出期望ZMP位置,并进行稳定性分析和验证。保证期望ZMP落入支撑面内。
由于建模和计算误差,实际ZMP与期望ZMP会存在一定误差,可能会造成双足机器人的失稳,因此,必须实时监控期望ZMP与实际ZMP的偏差,并进行相应的补偿。
三、轮式机器人
轮式移动的效率高,轮式移动适用于大多应用场合,三轮足以保证移动平台的平衡。
1.轮子结构
标准轮:两个自由度(定向),绕轮轴和接触点旋转。
脚轮:三个自由度(万向),绕轮轴,接触点和脚轮轴旋转。
标准轮操纵独立完成,无副作用
脚轮操纵会引起附加力作用底盘
瑞典轮:三个自由度
球形轮
2.轮式移动平台的特征
(1)三个轮子可以保证平台的稳定性(静态)
重心要在三个轮子接触点组成的三角形内
更多的轮子可以增强稳定性(静动态)
需要柔性的悬挂系统
(2)大尺寸的轮子可以跨越更高的障碍
3.轮子的部署


差速驱动:转弯行驶或在不平路面上行驶时,使左右车轮以不同转速滚动,即保证两侧驱动车轮作纯滚动运动。
同步驱动:
所有的轮子转动被同一马达驱动- - -定义平台的移动速度
所有轮子的转向被同一马达驱动- - -设定平台的前进方向
四、移动机器人的空间坐标变换
未完待续…