Apollo课程学习5——规划
Apollo课程学习5——规划
- 学习前言
- 什么是运动规划
-
- 一、运动规划概述
- 二、基本的运动规划
-
- 1、地图路线规划——高等级
- 2、轨迹生成——低等级
- 三、A-star算法
- 四、D-star算法
- 五、总结
-
- 1、ST图最终状态
- 2、SL图最终状态
- 优化问题
-
- 一、目标函数的构建
-
- 1、运动规划的方法
- 2、总结
- 二、约束条件(环境变化)
-
- 1、运动规划概述
- 2、车辆模型的建立
- 3、曲线坐标系转换
- 4、轨迹平滑的方法
- 5、轨迹的评估
- 三、求解方法
-
- 1、路径-速度解耦规划
- 1.1 动态规划
- 1.2 二次规划问题
- 2、总结
- Apollo EM Planner
-
- 一、Apollo EM规划框架
- 二、优化决策问题
- 三、非线性优化问题
学习前言
今天的学习内容是规划。

什么是运动规划
一、运动规划概述
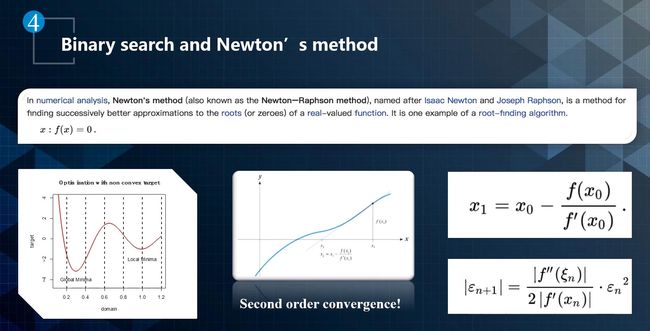
规划问题本质上是一个搜索问题,即对一个给定的函数,寻找最优解。相对于无人车而言,规划问题就是给定现在的状态,找到无人车移动的最优解,通常最优解目标函数F(x)定义。
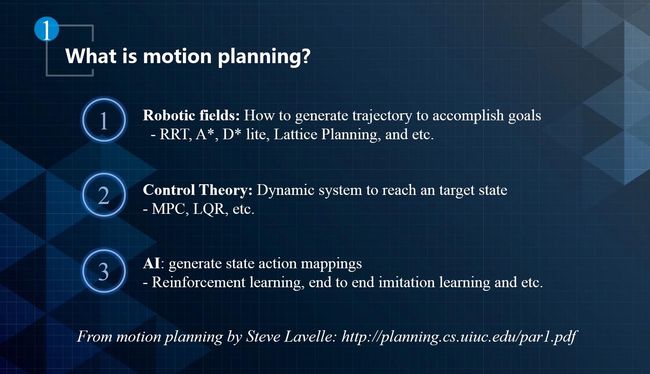
从内容考虑,规划问题涉及三个领域,机器人领域,控制领域和人工智能。
车辆状态、交通灯信息、障碍以及障碍轨迹、导航、高精地图都是规划模块能获得的信息。规划就是在这样的部分可见信息中给无人车找到一条轨迹,它不仅是一条路径,还包含路径信息和速度配置文件,需要保证速度和路径变化都是平滑的。

二、基本的运动规划
1、地图路线规划——高等级
路线规划的目标是找到从地图上的A前往B的最佳路径,路线规划使用了三个输入:地图、当前在地图上的位置、目的地。
在Apollo开始使用搜索算法查找路线之前,先将地图数据重新格式化为“图形”的数据结构,该图形由 “节点”(路段)和“边缘”(路段之间的连接) 组成。因为在计算机科学领域,人们已发现许多用于在图形中查找路径的快速算法,可以轻松地将图形上的路径重新转换为地图上的路径。
2、轨迹生成——低等级
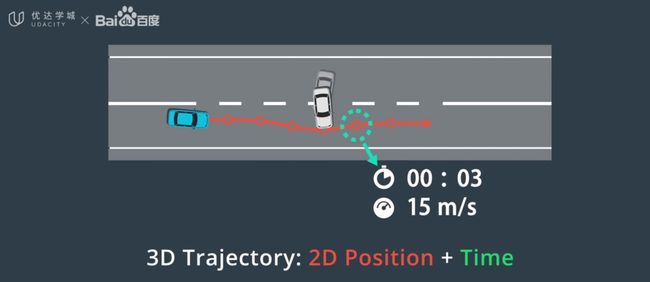
处理不属于地图上的物体(如其他车辆、行人和自行车等),这些场景需要更低等级、更高精度的规划。轨迹规划的目标是生成免碰撞和舒适的可执行轨迹,该轨迹由一系列点定义。我们为每个路径点分配了一个时间戳和速度。
- 时间戳。将时间戳与预测模块的输出相结合,以确保我们计划通过时,轨迹上的每个路径点均未被占用。这些时间戳创建了一个3D轨迹。
- 速度。确保车辆按时到达每个路径点。
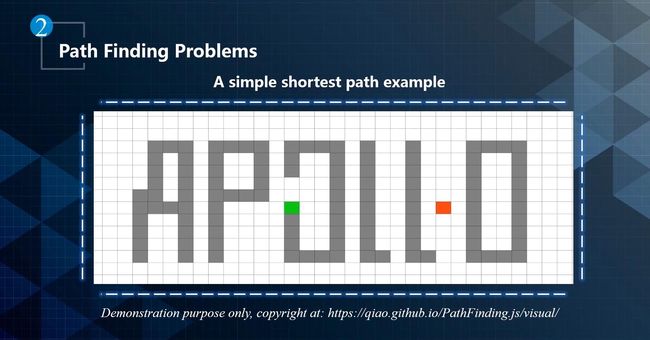
从最简单问题出发,把运动规划抽象成一个路径查找问题,只关心无人车怎样走,周围环境是不变的。如下图所示,我们将其抽象成无数的网格,从绿色的点到红色的点的路径规划就是一个path finding problem 。
三、A-star算法
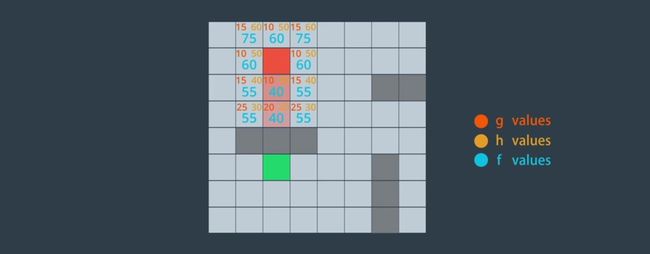
如下如所示,我们将网格中的每个单元格视为一个节点,网格中也包含一些阻挡潜在路径的墙壁(灰色部分)。从初始节点开始,我们需要确定8个相邻节点中最有希望的候选节点。根据具体情况可自定义成本估算方式。
- g值:从开始节点前往候选节点的成本。
- h值:从候选节点前往目的地的估计成本(启发式成本)。
- f 值:g值和h值的计算和,最佳候选节点是f 值最小的节点。
每当抵达新节点时,将重复此过程来选择下一个候选节点(尚未访问过且具有最小f值的节点)。
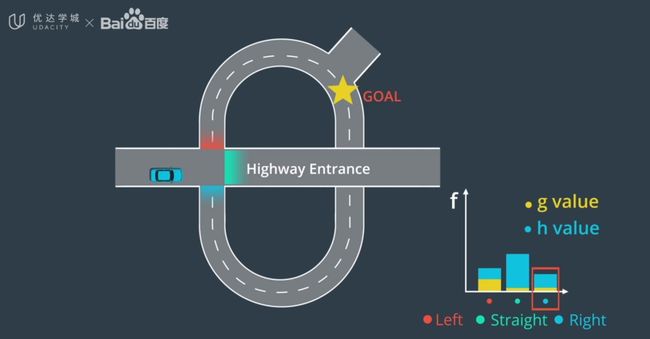
可以通过启发式方式对搜索问题进行优化。A-star算法是大概知道红点在右边,定义一个启发式函数,该函数猜测距离目标还有多远,通过这种方法先搜索一些比较近的点,然后从这个点出发逐渐扩大搜索圈,如下图所示。
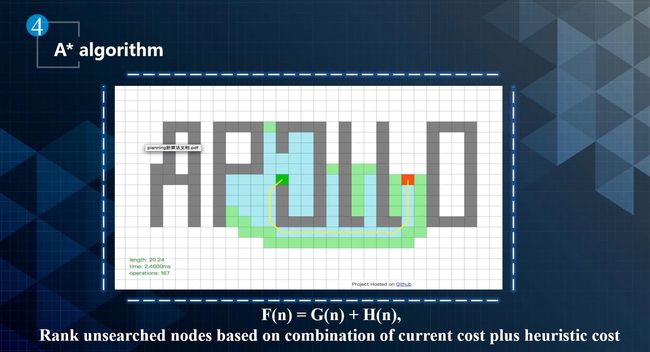
A-star花费时间比广度优先算法时间更短,因为它有信息支持,现在的一些路径搜索算法本质上都是从A-star算法出发,需要知道目标函数的样子。目前,A-star算法还不能直接用在规划模块上,因为A-star算法本身要求对整个环境全知。而自动驾驶对周围环境是部分观察的,如下图所示。
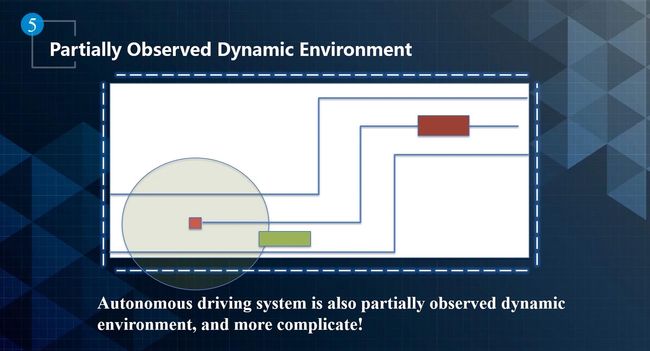
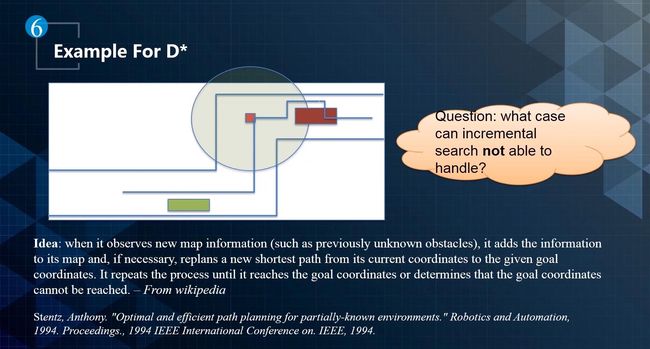
四、D-star算法
对于部分观察我们可以使用贪心算法,其实就是一个增量搜索,就是在看见的情况下尽量走好。
如下图所示,D-star算法利用当前能够看到的信息进行增量规划,D-star的特点是处理在看到的有限范围的条件下,如何到达预定地点的搜索问题方法,这种增量搜索很难通过一步步的迭代达到全局最优解。
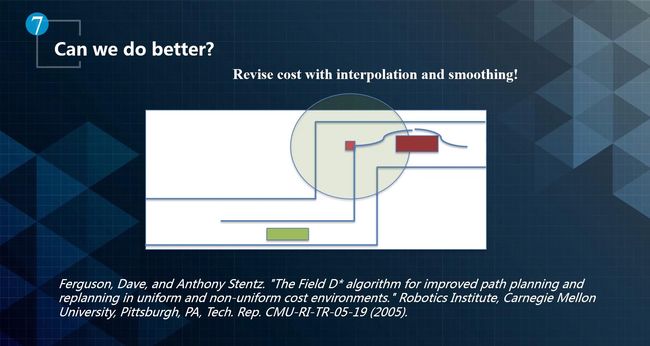
在现实生活中,人类开车是很少做90度直角转弯的,这样的折线并没有考虑无人车运动过程中的运动模型和动力学模型。可以通过平滑性曲线的方式来优化折线,如下图所示。
五、总结
1、ST图最终状态
- 巡航。车辆将在完成规划步骤后定速行驶,在时间 t 点以s点的速度巡航,最终状态的加速度为0。
- 跟随。在时间 t 时出现在某辆车后面,在跟随车辆时,需要与前方的车保持安全距离,速度和加速度将取决于我们要跟随的车辆。
- 停止。加速度和速度会被修正为0。
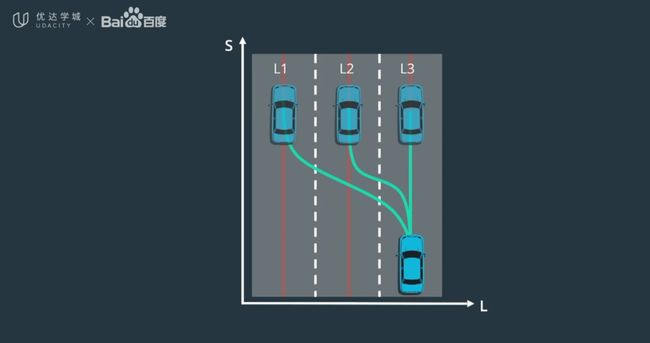
2、SL图最终状态
为了确保稳定性,汽车驶向的终止状态应该与车道中心一致,ST图轨迹应该车辆与车道线对齐并直线行驶而结束,如下图所示。为了达到这种终止状态,车的朝向和位置的一阶和二阶导数都应该为0,这意味着车辆既不是横向移动的,也不是横向加速的。
优化问题
一、目标函数的构建
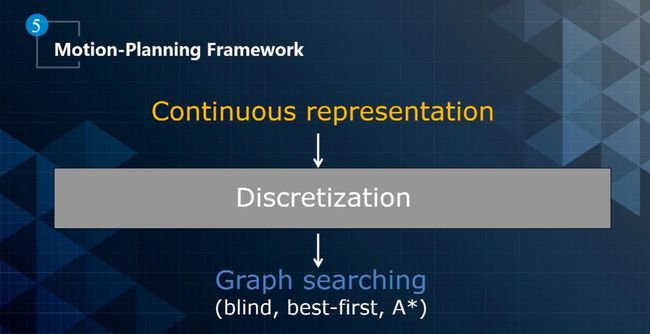
1、运动规划的方法
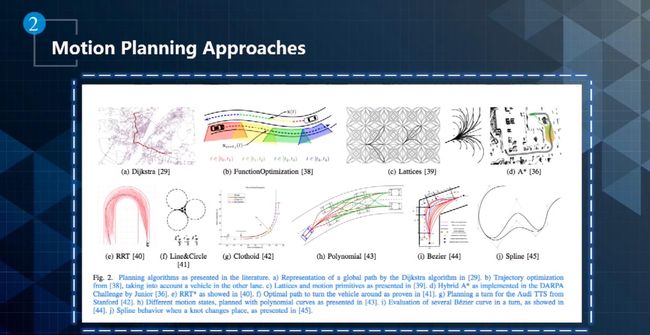
运动规划是在连续空间的一种优化,对于连续空间过程的优化往往比较难。因此,通常先将连续空间问题离散化表示,然后寻找对应的解决方案。如下图所示,可以使用图搜索的方法对离散空间问题进行求解。
规划问题中涉及到一些约束条件:
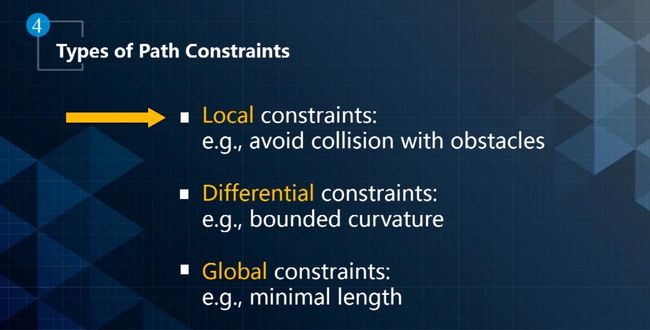
- Configuration Space (构造空间)
- 质点模型将运动轨迹当成一个点,在数学定义上是点和点没有交集,是不相撞的。但是不能把无人车看成一个点,因为在实际生活中一个车和一个车可是会相撞。
- 对于刚体而言,不仅是XY坐标,还要有heading信息才能研究跟障碍物之间的关系。对于无人车来说有更多的变量。其复杂性主要体现在两个方面(如图所示):
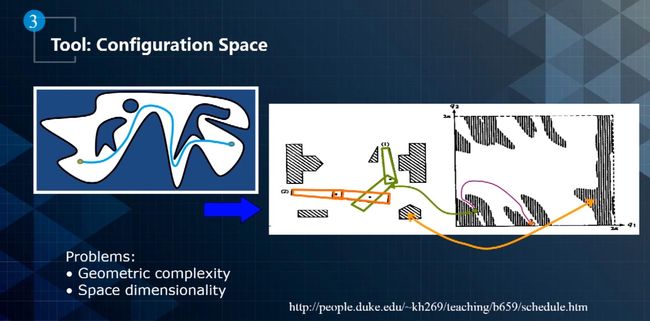
例如bounding box跟bounding box之间怎么相交,一个多面体跟一个多面体之间怎么检测出路径,以避免跟另一个障碍物相交。
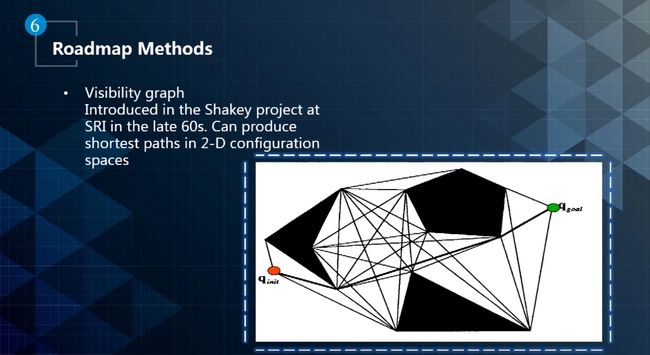
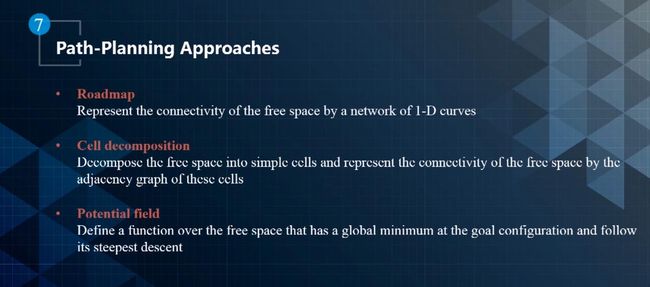
- Roadmap
- 这个方法使用简单的连通图表示配置空间,类似于城市如何用地铁图表示。其中Visibility Graph是一种常用的Roadmap方法,如下图所示。Visibility Graph将起始节点,所有障碍物的顶点和目标节点相互连接来构建路线图。我们会发现,从红点到绿点的最短路径一定会通过靠近障碍物边界的折线。
- Cell decomposition(网格分解方法):将整个空间分割成一个个cell,通过cell的连接图表示自由空间的连接属性。
- Potential field(势场法):直接用微分方法处理。
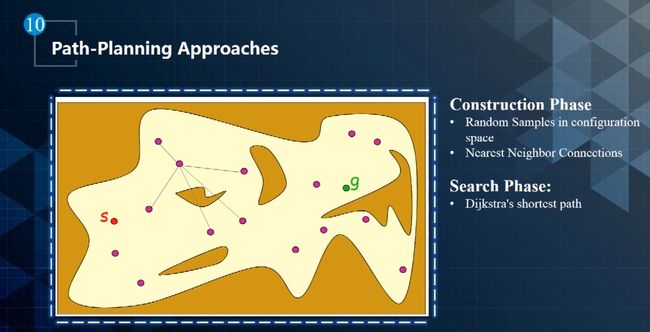
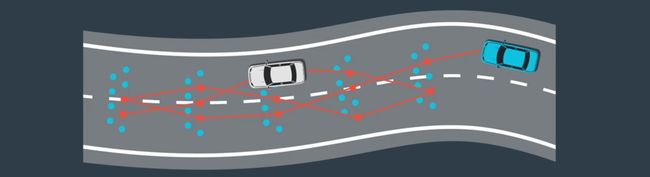
- PRM:
- 在整个配置空间随机采样一些点,如果点在障碍物上则去掉,然后将这些点连接起来,如下图所示的紫色点。从点s到g的最短路径就可以利用A-Star算法进行求解。但是该方法要求是对全局感知,而无人车是一个部分感知的应用场景,因此有RRT的改进方法。
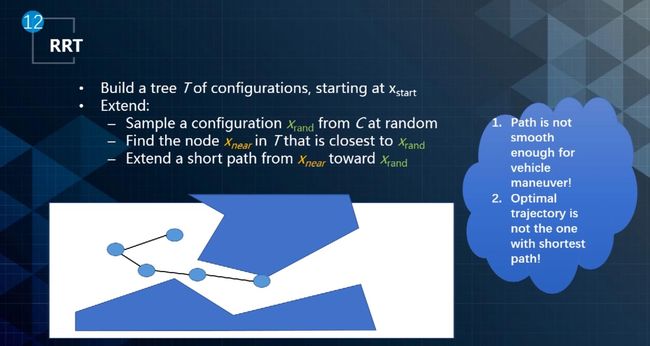
- RRT(基于快速扩展随机树算法):
- 如下图所示,它构造一个根结点为起始点的配置空间树,通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树中的叶子节点包含了目标点或进入了目标区域,便可以在随机树中找到一条由从初始点到目标点的路径。如果叶子节点和目标节点之间的连接被障碍物阻挡,则需要重新采样。
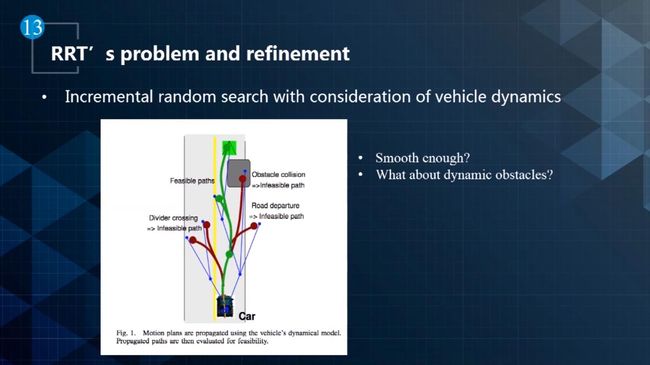
通过这种方式离散化的线是不适合无人车行驶的,因为这些线的curvature不连续,甚至curvature都没有。针对这一问题MIT提出使用平滑曲线进行连接的方法,如下图所示。但是该方法得到的路径可能还是不够平滑,另外对动态障碍物的处理也存在问题。
- Lattice网格方法
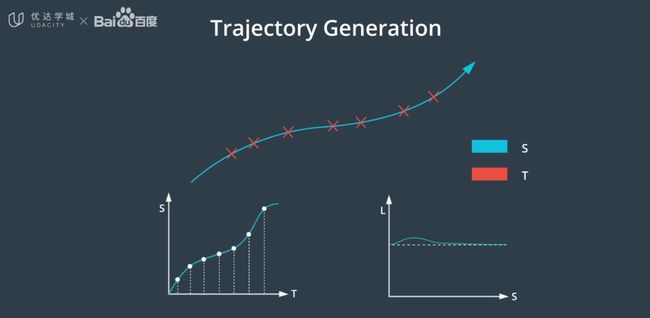
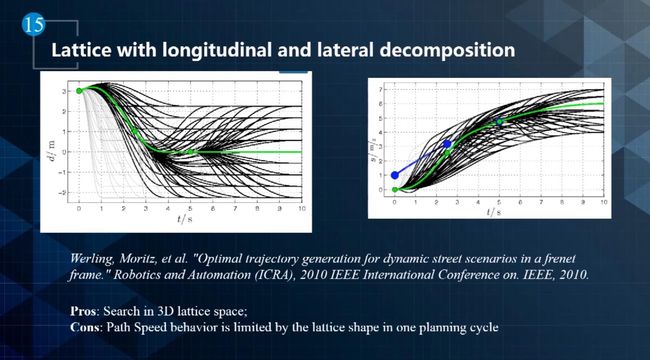
通过使用Frenet坐标,我们可以将环境投射到纵轴和横轴上,将三维问题分解成两个单独的二维问题。 - ST轨迹:具有时间戳的纵向轨迹。
- SL轨迹:相对于纵向轨迹的横向偏移。
Lattice规划首先分别建立ST和SL轨迹,然后通过s值进行匹配来合并轨迹,构建由二维路径点和一维时间戳组成的三维轨迹,最后对预选模式中的多个候选最终状态进行采样,使用成本函数对这些轨迹进行评估,并选择成本最低的轨迹。
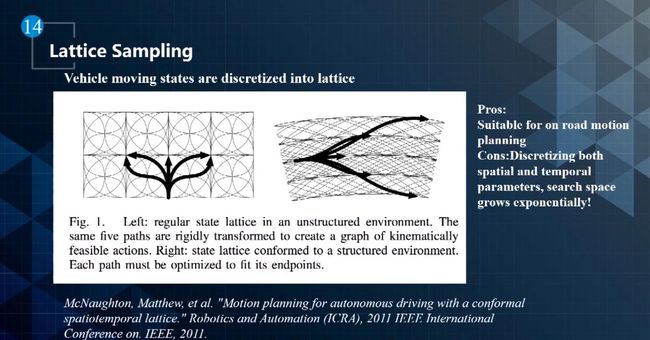
- 如下图所示,最原始的 Lattice网格方法非常简单,它在XY世界坐标系中,以1米为单位进行网格划分,然后用无人车可以行进的、曲率连续的曲线将起始点和目标点连接起来。
- 但是对于道路来说,这种抽象方式并不合适。Lattice Sampling撒点不能在规则化坐标系下去撒点,因为道路并不是一个完全XY的坐标系。因此提出了在sl坐标系下进行离散的方法Lattice in Frenet Frame。
当抽象出这些点之后,要使用平化曲线连接。
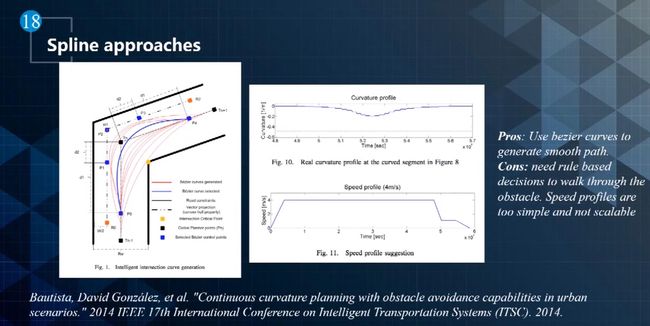
- Splines方法:使用螺旋曲线的方法。
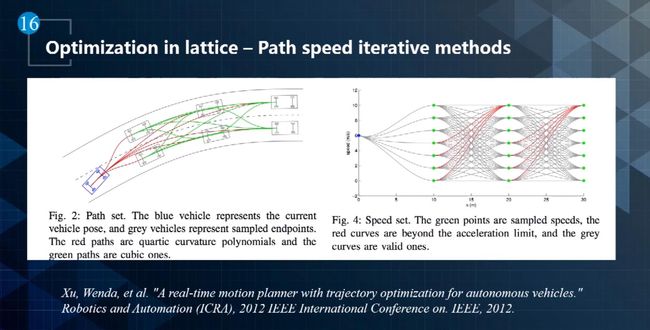
- Polynomial方法:使用路径-速度迭代优化的方法对Lattice方法进行优化,它将问题降维,分成了path 和 speed两个维度逐渐优化,这是一种iterative的处理方式。
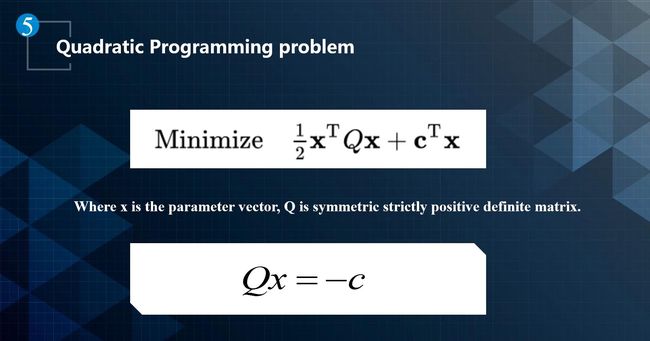
还可以用Functional Optimization方法对运动规划进行处理,对整个问题建模,设计相应的代价函数。二次规划就是其中一种常用的方法。

2、总结
二、约束条件(环境变化)
1、运动规划概述
运动规划根据环境的变化在算法和处理方法上有很大的不同,涉及到模型建立、平滑优化和坐标转换以及障碍物投影等。如下图所示。
2、车辆模型的建立
对于汽车而言,质点模型是远远不够的,无人车是前轮转向的车,前后位置的变化是不一样的。
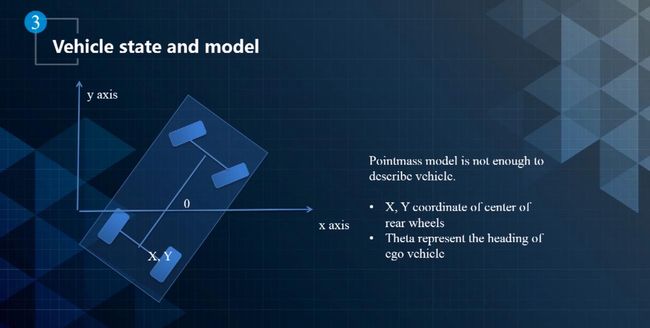
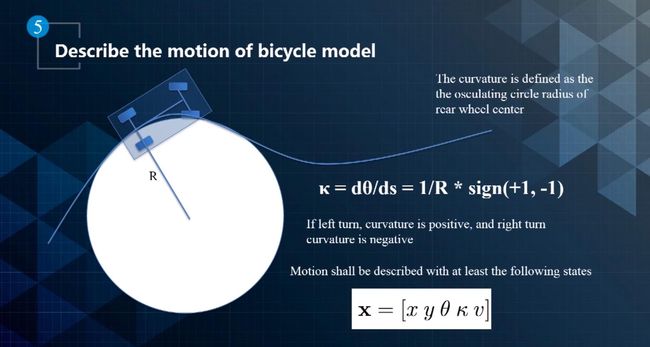
- 自行车模型:
- 可以将汽车的四轮抽象成两个轮子,前轮中心和后轮中心的运动方向和自行车一样。车辆在垂直方向的运动被忽略掉,用一个二维平面上的运动物体来描述车辆的运动模型。
- 自行车运动的时候具有以下特点,旋转车头的时候,前轮和后轮都围绕一个中心点转动,并且后轮的转向半径(1/k)(1/k)与方向盘转动角度w满足下图所示关系,其中L为前轮中心和后轮中心的距离。
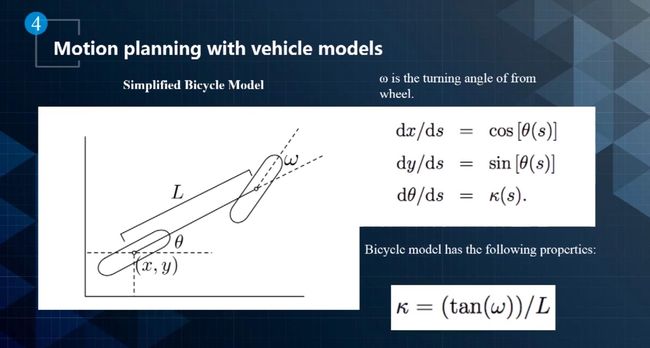
在实际的自行车运动模型中,后轴中心是沿着如下图所示的一条平滑的轨迹运行,该轨迹对应的曲率(k)表示调整方向盘的度数,如果为正,表示向左转,反之则向右转。
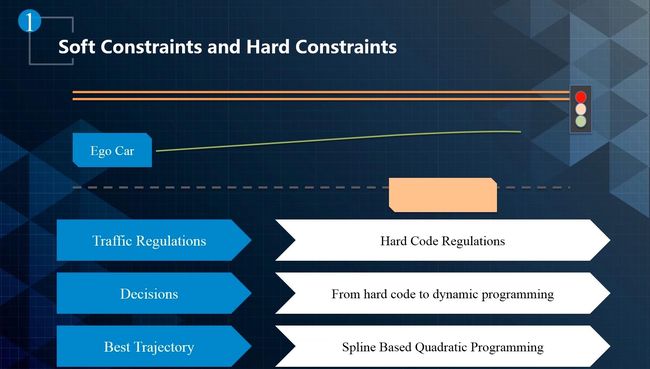
- 在实际过程中无人车的去抽象约束:
- 在这个场景中,有三类约束,这些限制又分为硬限制和软限制,例如交通规则属于硬性限制。
3、曲线坐标系转换
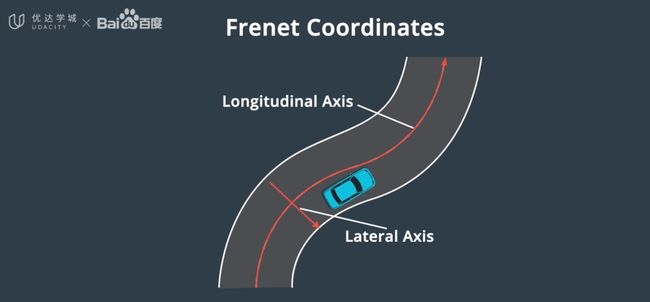
- Frenet坐标
我们常用的笛卡尔坐标系对车辆来说并不是最佳选择,所以选用可描述汽车相对于道路的位置的Frenet坐标。 - 纵坐标s:代表沿道路的距离。
- 横坐标d:表示汽车偏离中心线的距离。
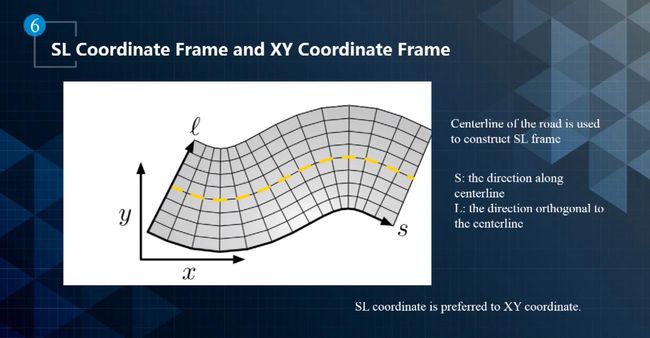
- SL坐标系也称为frenet frame。
- 它以道路中心线为参考,S表示道路中心线的方向,L表示与道路中心线垂直的方向。
- 在结构化道路上行驶的时候,SL坐标系比XY坐标系更加贴合实际需求。
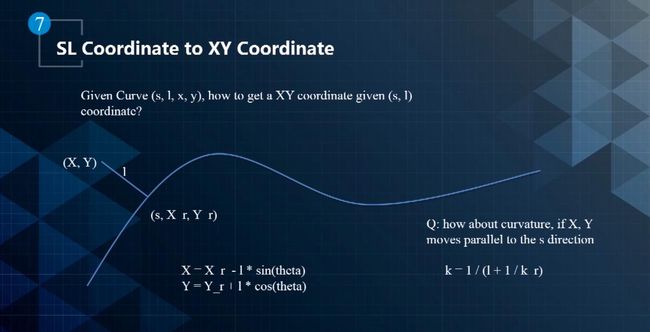
- SL坐标系到XY坐标系的投影:
- 之所以要投影到世界坐标系,是因为很多信息是全局的,例如红绿灯位置,参考的是XY世界坐标系。
- 在给定SL坐标系时,每一个点的S坐标本身对应一个(x-r,y-r)坐标,根据该点的横向偏移距离,可以求出给定点在世界坐标系中的XY位置,如下图所示。其中theta是参考线的方向,也就是切线方向。
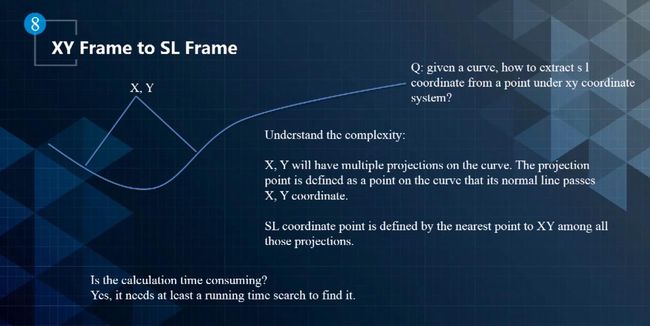
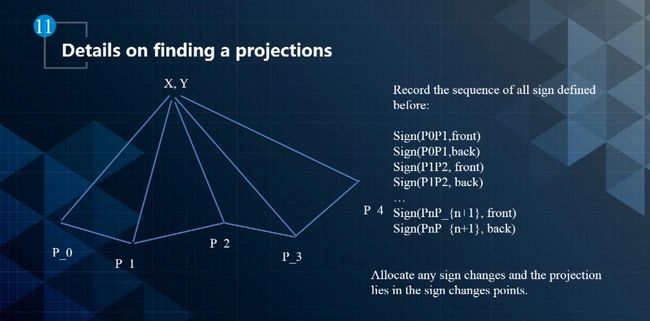
- XY坐标系到SL坐标系的投影
- 投影点是经过XY坐标,且垂直于曲线的线段与曲线的交点。因为SL坐标系并不是唯一的,XY会在曲线上产生很多投影,如下图所示XY就有两个投影点。通常情况下会增加一些限制,例如投影距离不能超曲率值。需要注意的是,掉头的时候还是需要特殊处理的。
4、轨迹平滑的方法
在自动驾驶中,我们将环境抽象成 SL 坐标系,在此坐标系下的曲线光滑度是有要求的。首先,曲线本身要平滑,其次曲率也要满足平滑的特性。因此需要对轨迹线进行平滑处理。
也不能先生成一条线,然后再进行平滑;不能对 Curvature 进行一个后期的平滑,因为 XY 坐标本身与 Curvature 是有联系的,不能单独平滑曲率,也不能单独平滑 X 或者 Y。
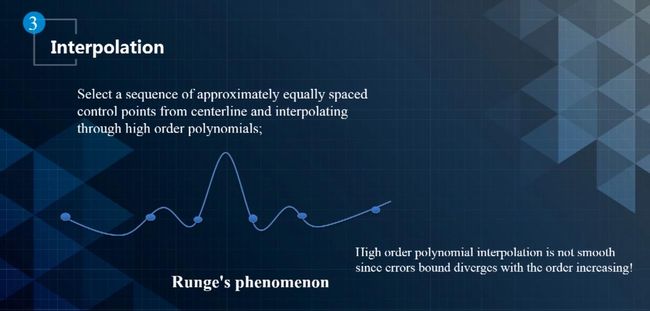
- 多项式:
- 首先,可以在轨迹上以等距离的方式随机选择一些点,然后用高阶多项插值的方式来近似表示轨迹,对多项式进行优化。但是高阶多项式不能用于平滑,因为高阶的多项式抖动太大,没有办法控制幅度,这就是常说的龙格现象,如下图所示。
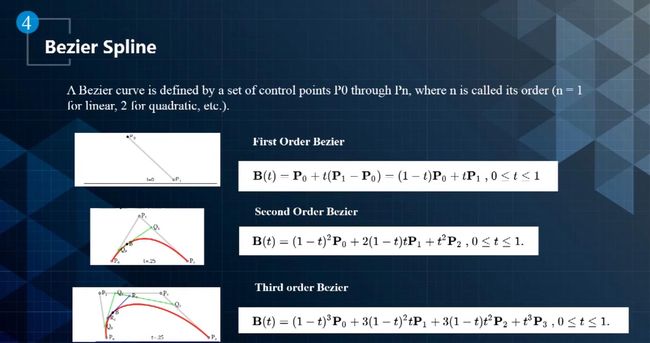
- Bezier Spline:
- Bezier Spline 曲线是由一系列控制点定义的,其中n代表曲线的阶数。如下图所示,分别给1阶、2阶、3阶Bezier Spline曲线的表示形式。通过对它们做平滑,得到平滑的曲线,例如二阶平滑保证曲线的曲率平滑。
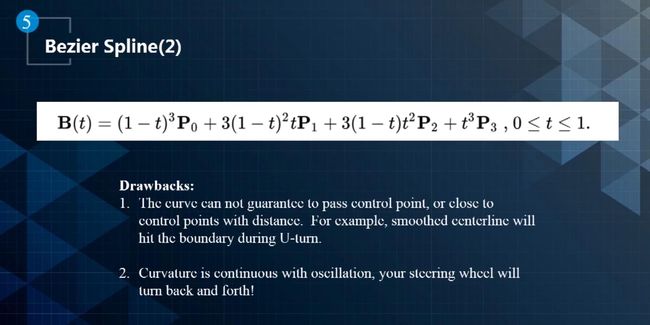
- Bezier Spline方法的缺点:
- Smoothing Spline:
- 定义平滑最简单的方法就是最短路径,但是路径最短还不能保证平滑性,因此会对其不同阶导数进行 Minimize 求解,保证导数空间的连续,这就是Smoothing Spline最初的思想。
- 一维平滑度定义:
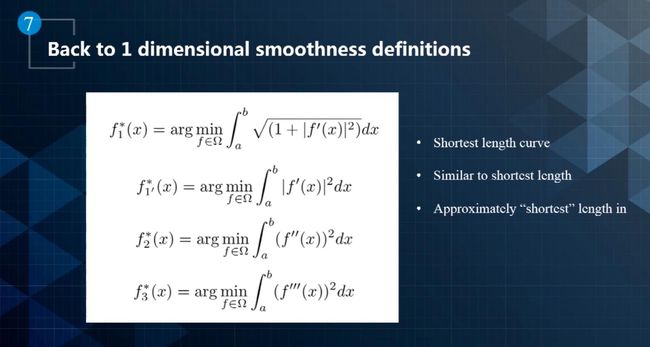
- Smoothing Spline 具有一些特殊的性质,在给定边界的条件下,它是一个多项式,可以找到最优解。但是它的 Boundary Constraint 只考虑了起点和终点,如果中间有障碍物就不是最优解。
- 这种情况下可以使用 Piecewise Polynomial(分段多项式) 来处理:
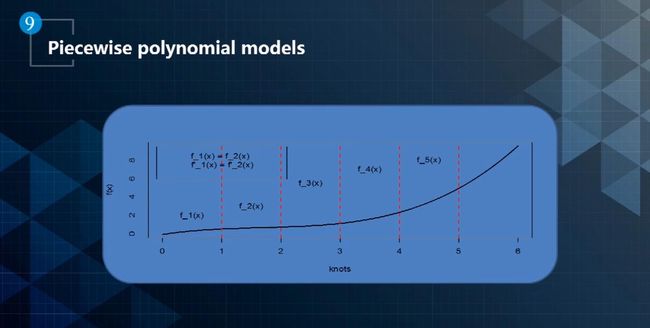
- 一个 Piecewise Polynomial 是一维的函数,描述二维曲线是不够的。
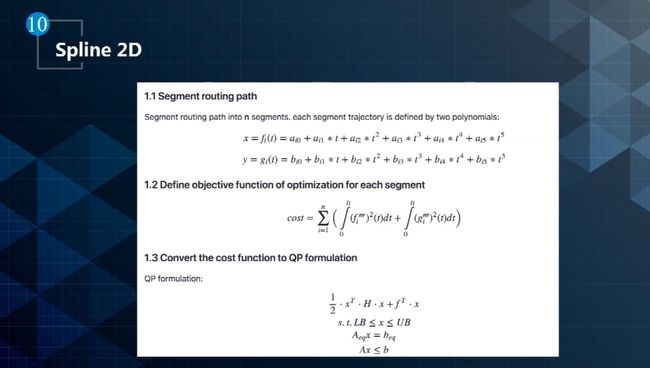
- Spline 2D:
- 假设我们把曲线分成 N 截,每节曲线段它的 X 坐标是一个 Polynomial ,Y 坐标也是一个 Polynomial 。如下图所示,用 5 阶多项式来表示 X 和Y,称之为 Quintic Spline(五次样条),每一节都是这样的函数。这种表示有一个很好的特性,就是目标函数具有旋转不变性。
- 我们让它在 X 坐标上的变化率,也就是三阶导的平方是最小的,Y 上的变化率三阶导也是最小的,代价函数就是这两个变化率的和。代价函数的求解就是一个二次规划问题。
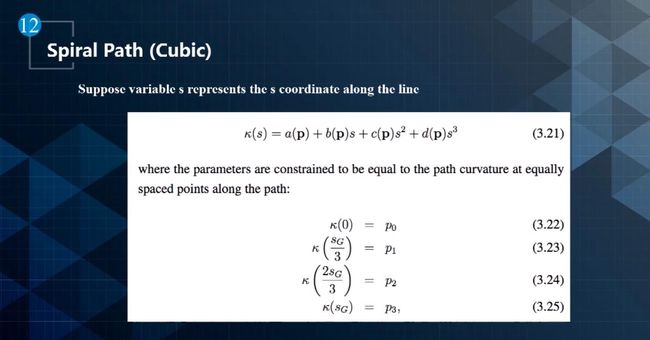
- 螺旋曲线:
- 通过一个极坐标形式定义,比如说沿着一条曲线,如果一个点 S 的曲率是知道的,可以唯一定义出一条经过 S 的曲线,也就是 Spiral Path 。那么可以让 Spiral Path 满足起点、终点约束条件生成一条螺旋曲线。
- 方法比较:
- 任何的曲线在足够密的时候都可以用Piecewise Spiral path 或者是 Piecewise Polynomial 表示。
- 但是它们的出发点不一样,Polynomial 计算很快很简单,Spline 2D 是一个凸空间里面生成一个 Spline 曲线。Spiral Path 是从 Configuration Space 出发。
- 理论上来讲,螺旋曲线生成的线是要比 Spline 更好处理,对一些极端情况处理更好。
5、轨迹的评估
- 轨迹应能免于碰撞,必须无障碍物。
- 要让乘客感到舒适,路径点之间的过渡以及速度的任何变化都必须平滑。
- 路径点对车辆实际可行,不能构建包含不可行机动的轨迹。
- 轨迹应合法,我们需要了解每个路径点的交通规律,并确保轨迹遵守这些法律法规。
车辆在不同的环境中使用不同的成本函数选择最佳轨迹。
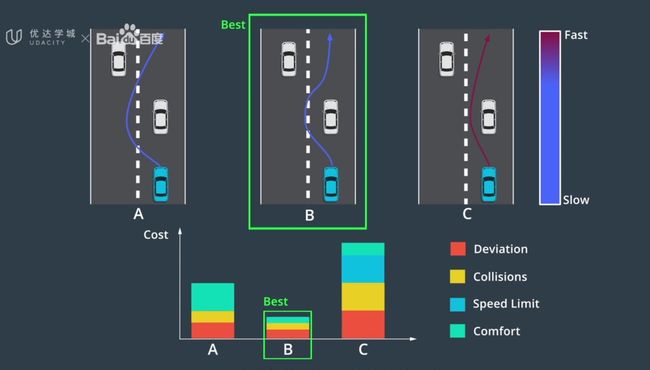
三、求解方法
1、路径-速度解耦规划
1.1 动态规划
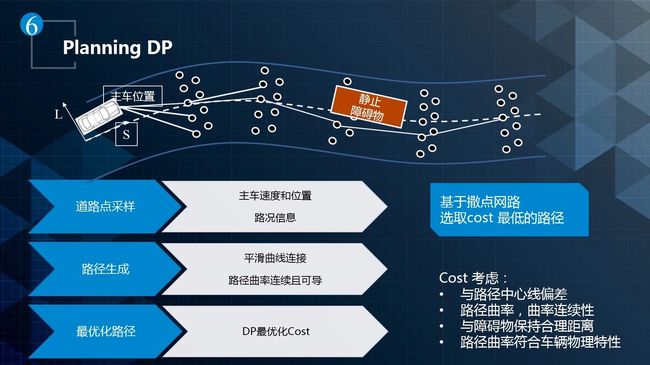
- 路径规划:
- 我们首先将路段分割成单元格,然后对这些单元格中的点进行随机采样,通过从每个单元格中取一个点并将点连接,通过重复此过程,我们就创建了多个候选路径。然后使用自定义的成本函数对每条路径进行评估,选择成本最低的路径。
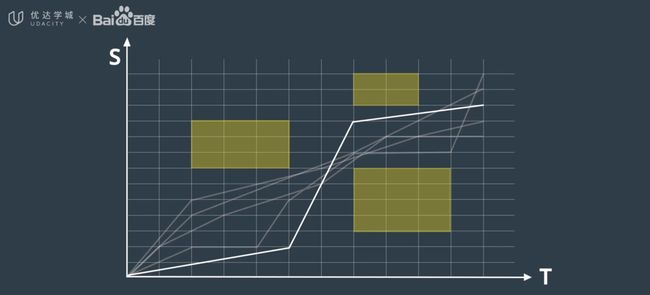
- 速度规划:
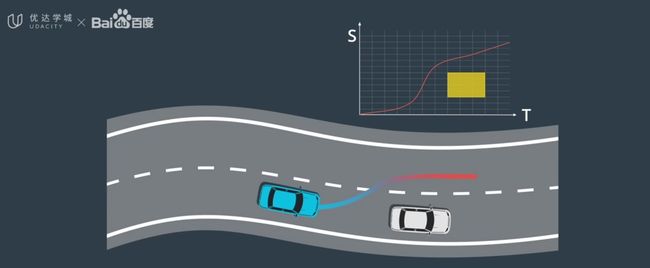
- 我们首先将ST图离散成多个单元格,单元格之间的速度有所变化,但每个单元格内速度保持不变。将障碍物绘制为在特定时间段内阻挡道路的某些部分的矩形(黄色部分),为避免碰撞,速度曲线不能与此矩形相交。接着,我们便可以使用优化引擎来搜索受到各种限制的低成本解决方案,选择最佳的速度曲线。
- 动态规划通过类似于有限元的方式,把问题从连续空间抽象成离散空间,然后在离散空间中进行优化。
- 虽然这种方法可以逼近连续空间中的最优解,但是计算复杂度很高,计算时间长。
1.2 二次规划问题
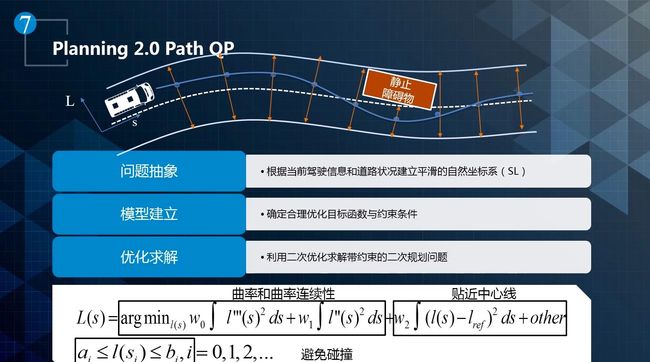
路径-速度解耦规划很大程度取决于离散化,尽管离散化使这些问题更容易解决,但生成的轨迹并不平滑,我们使用二次规划将平滑的非线性曲线与这些分段式线性段拟合,可将离散解决方案转换为平滑轨迹。最后我们将路径和速度曲线合并构建轨迹。
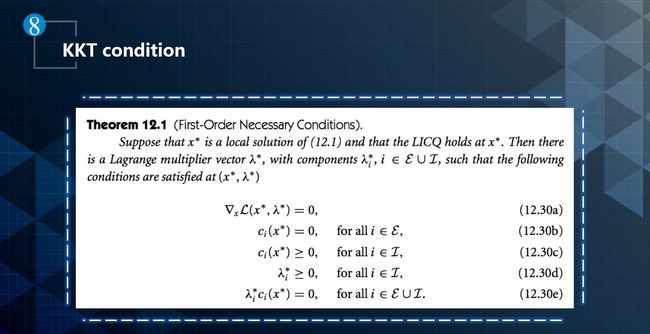
- 带约束的二次规划问题:
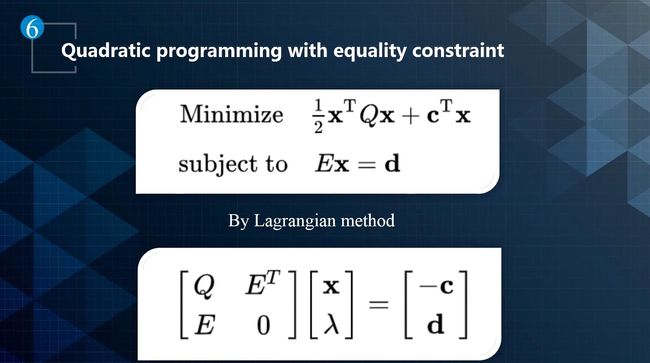
求解二次规划问题的方法 KKT:
2、总结
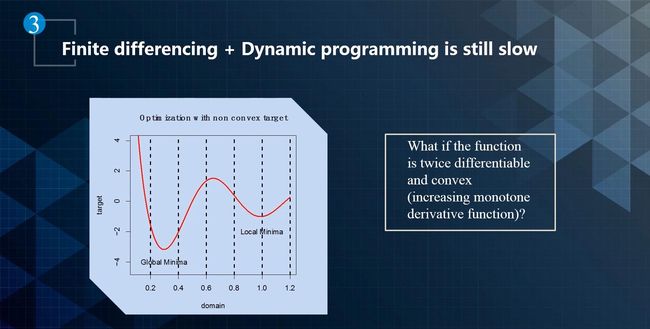
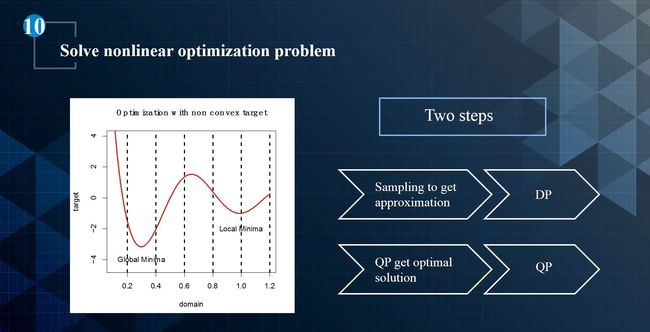
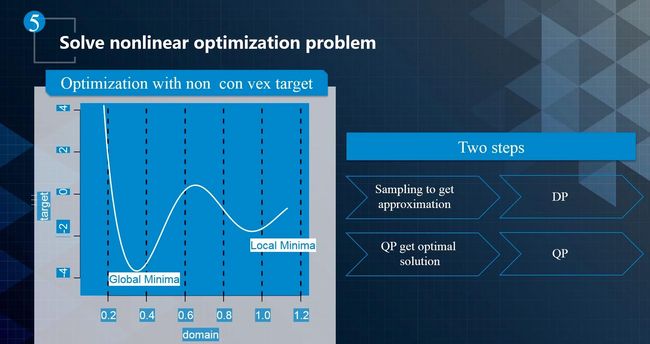
总的来说,对于求解非线性优化问题(自动驾驶中的规划基本都是非线性的),通常就是用启发式方法来求解。先用动态规划给出一个粗略解,给出一个凸空间。然后用二次规划方法在凸空间里去寻找最优解,如下图所示。
Apollo EM Planner
一、Apollo EM规划框架
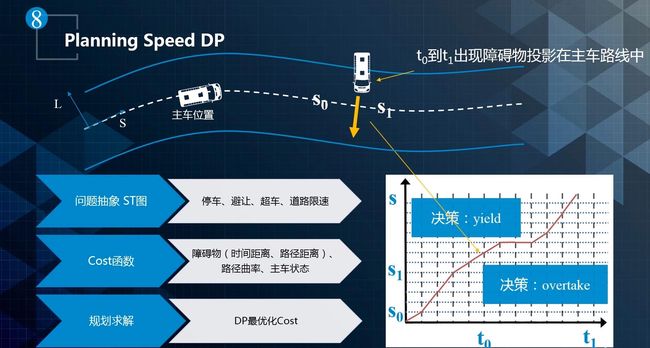
Apollo 设计了一个 EM 规划框架来处理不同的场景,如下图所示,展示处理一个换道场景。
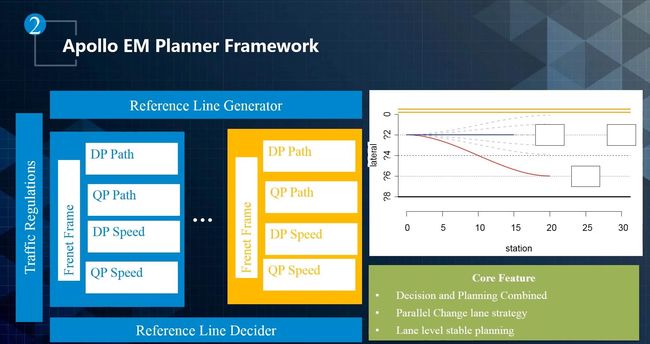
在蓝线和红线交点处发现前方有车辆行驶缓慢,可能要进行换道处理。在 Apollo EM 规划框架中,会对换道和继续在本车道行驶分别规划出一条轨迹,只有换道之后的 Trajectory 要比本车道的 Trajectory 好的情况下才换道。
在 Apollo 的 EM planner中,决定哪个道比较好的模块叫做 Reference Line Decider,中间的并行模块是通过 Path Speed Iterative 的方式并行实现的。
二、优化决策问题
优化决策问题本身是一个 3D optimization 问题,其中包含了三个维度,需要生成 SLT 。三维空间的优化相对比较复杂,常用的方法有两种:
- 一种就是离散化的方式去处理。
- 另一种方法是 Expectation Maximization(期望最大化)。其基本思想是降维处理,先在一个维度上进行优化,然后在优化的基础上再对其它维度进行优化,并持续迭代以获得局部最优解。
对于无人车,Apollo 上的 EM planner 对 Path-Speed 进行迭代优化,如下图所示:
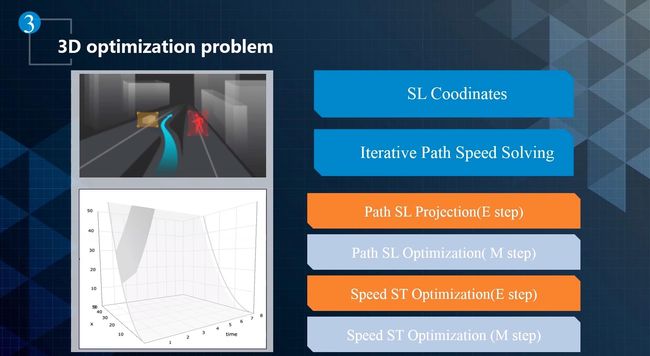
首先,生成一条 Optimal Path ,在最优路径的基础上生成 Optimal Speed Profile 。在下一个迭代周期,在优化后的 Speed 的基础上,进一步优化 Path,依次类推。它分了四步走,其中分为两步 E step 和 M step 。这种算法的缺点是不一定能收敛到全局最优解。
- 优化问题的关键步骤:
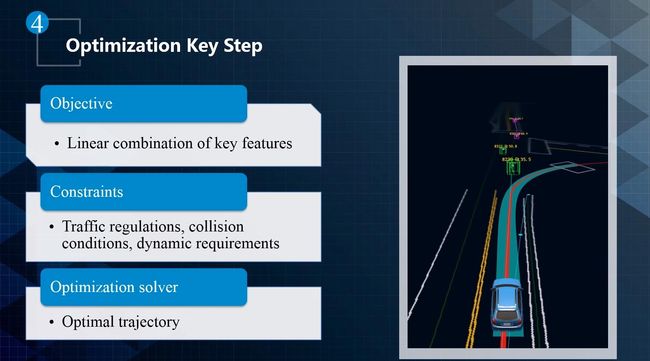
三、非线性优化问题
对于非线性优化问题,通常都是分两步走:一是动态规划,先找一个粗略解。然后再是二次规划,从粗略解出发,找出一个最优解。
- 以路径规划为例,假设前方有一个障碍物,首先做出从左边还是右边的避让决策,然后通过 QP 生成一条平滑的曲线去避让障碍物。
- 对于速度而言,先通过动态规划的方式给出一个粗略的解,然后再通过二次规划的方式给出一个更平滑的解。