【学习笔记】CS224W速记(图模型专题)
序言
本文是对2021年秋季CS224W课程slides的速记,没有作业的解答。
CS224W其实看下来更偏向于是理论计算机方向的研究(比如图论),而非重点在图神经网络,因此很多内容理论性很强,本文是笔者花两天时间速过了一遍记录的一些对自己有用的要点,更偏向于图神经网络应用方面的摘要,一些没看懂的部分暂时没有深入研讨,仅先留个印象。
课程链接:http://web.stanford.edu/class/cs224w/
文章目录
- 序言
-
- 节点中心度
- 图基元
- 计算两个节点之间路径总数的巧解
- 图核
- 节点嵌入之随机游走
- 整图嵌入
- PageRank算法
- 二分图推荐
- 节点分类之消息传递
- 置换等变异性
- GCN(mean-pool)
- 消息计算与消息聚合
- GraphSage(max-pool)
- GAT
- GNN使用技巧
- GIN
- 异构图
- RGCN
- 知识表示学习
- 知识图谱与多级推理
- 子图与Motif
- 神经子图匹配(没有看懂)
- 推荐系统
- Louvain算法
- GraphRNN
- 一些前沿研究
- LightGCN概述
节点中心度
给定无向图 G = ( V , E ) G=(V,E) G=(V,E),节点 v v v的中心度(centrality) c v c_v cv用于衡量节点 v v v的重要性,具体有如下几种计算方式:
-
特征向量中心度(eigenvector centrality):节点重要性由与它相邻节点的重要性决定
c v = 1 λ ∑ u ∈ N ( v ) c u ∈ R c_v=\frac1\lambda\sum_{u\in N(v)}c_u\in\R cv=λ1u∈N(v)∑cu∈R
其中 N ( v ) N(v) N(v)表示节点 v v v的邻接点, λ > 0 \lambda>0 λ>0为标准化系数。求解上式等价于求解 λ c = A c \lambda{\bf c}=A{\bf c} λc=Ac,其中 A A A为无向图 G G G的邻接矩阵,因此等价于求解 A A A的特征值与特征向量,根据Perron-Fronbenius定理可知, λ max \lambda_{\max} λmax必然为正,则通常使用最大特征值 λ max \lambda_{\max} λmax对应的特征向量 c max {\bf c}_{\max} cmax作为式 ( 1 ) (1) (1)的解。
-
中介中心度(betweenness centrality):节点重要性由它中转多少对节点之间的最短路径决定
c v = ∑ s ≠ v ≠ t count(shortest paths between s and t that contain v ) count(shortest paths between s and t ) (2) c_v=\sum_{s\neq v\neq t}\frac{\text{count(shortest paths between } s\text{ and }t\text{ that contain }v)}{\text{count(shortest paths between } s\text{ and }t)}\tag{2} cv=s=v=t∑count(shortest paths between s and t)count(shortest paths between s and t that contain v)(2)
如在无向图 ( A , C ) , ( B , C ) , ( C , D ) , ( B , D ) , ( D , E ) (A,C),(B,C),(C,D),(B,D),(D,E) (A,C),(B,C),(C,D),(B,D),(D,E)中, c A = c B = c E = 0 , c C = c D = 3 c_A=c_B=c_E=0,c_C=c_D=3 cA=cB=cE=0,cC=cD=3 -
紧密中心度(closeness centrality):节点重要性由它与所有其他节点的距离之和决定
c v = 1 ∑ u ≠ v shortest path length between u and v c_v=\frac1{\sum_{u\neq v}\text{shortest path length between } u\text{ and }v} cv=∑u=vshortest path length between u and v1
如在无向图 ( A , C ) , ( B , C ) , ( C , D ) , ( B , D ) , ( D , E ) (A,C),(B,C),(C,D),(B,D),(D,E) (A,C),(B,C),(C,D),(B,D),(D,E)中, c A = 1 / 8 , c D = 1 / 5 c_A=1/8,c_D=1/5 cA=1/8,cD=1/5
图基元
-
首先定义图的同形(isomorphism):称两个节点数相等的图 G 1 = ( V 1 , E 1 ) G_1=(V_1,E_1) G1=(V1,E1)与 G 2 = ( V 2 , E 2 ) G_2=(V_2,E_2) G2=(V2,E2)是同形的,若存在一一映射 f : V 1 → V 2 f:V_1\rightarrow V_2 f:V1→V2,使得 E 1 = E 2 E_1=E_2 E1=E2(比如五角星和五边形就是同形图)。
判断两个图是否同形是NP-hard
-
图基元(graphlets):非同形的图构成的集合。
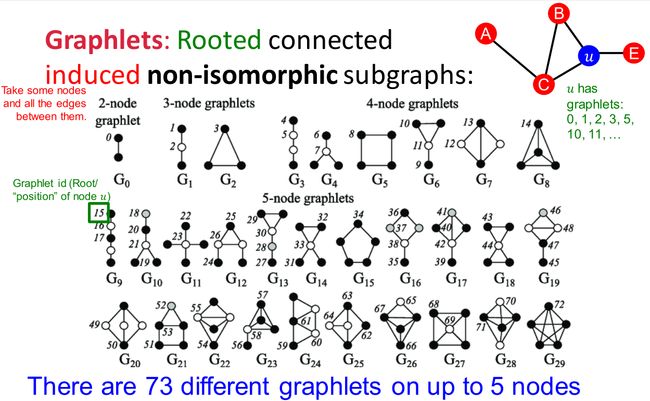
比如上图中陈列节点数不超过 5 5 5的所有图基元,节点上标号记录不同类型的图基元节点(如 G 8 G_8 G8中的 4 4 4个节点本质上是同类)。
节点数 图基元数量 累积不同图基元节点数量 2 2 2 1 1 1 1 1 1 3 3 3 2 2 2 4 4 4 4 4 4 6 6 6 15 15 15 5 5 5 21 21 21 73 73 73 事实上图基元未必一定是连通图,但是上图和上表中统计的都是连通情况下的计数。
-
图基元度向量(graphlet degree vectors,GDV):
节点 u u u的GDV由它所在的子图中不同图基元节点出现频率构成。
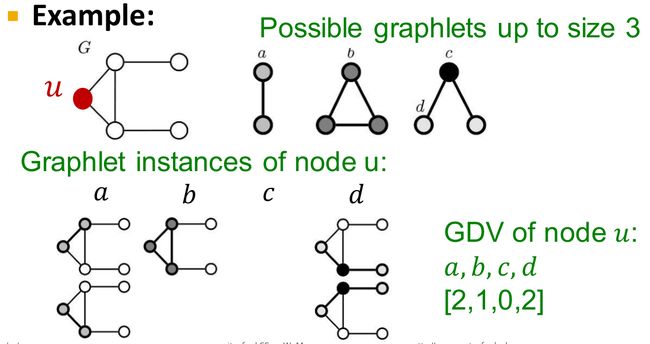
如上图所示,只考察节点数不超过 3 3 3的图基元,共计 4 4 4种不同的图基元节点 a , b , c , d a,b,c,d a,b,c,d,考察节点 u u u分别作为这四类节点出现的次数,得到的GDV为 [ 2 , 1 , 0 , 2 ] [2,1,0,2] [2,1,0,2]
计算两个节点之间路径总数的巧解
定义无向图 G = ( U , V ) G=(U,V) G=(U,V)邻接矩阵 A A A:
A u v = { 1 if u ∈ N ( v ) 0 if u ∉ N ( v ) A_{uv}=\left\{\begin{aligned} &1&&\text{if }u\in N(v)\\ &0&&\text{if }u\notin N(v) \end{aligned}\right. Auv={10if u∈N(v)if u∈/N(v)
定义路径计数矩阵 P ( n ) P^{(n)} P(n):
P u v ( n ) = count(paths of length n between u and v ) P^{(n)}_{uv}=\text{count(paths of length }n\text{ between} u\text{ and }v) Puv(n)=count(paths of length n betweenu and v)
则可以证明 P ( n ) = A n P^{(n)}=A^n P(n)=An,这里的路径可以不是简单路径(即路径重可以存在环或重复边)。
可以通过数学归纳法证明:
P u v ( n + 1 ) = ∑ w ∈ V A u w P w v ( n ) = ∑ w ∈ V A u w ( A n ) w v = A n + 1 P_{uv}^{(n+1)}=\sum_{w\in V}A_{uw}P_{wv}^{(n)}=\sum_{w\in V}A_{uw}(A^{n})_{wv}=A^{n+1} Puv(n+1)=w∈V∑AuwPwv(n)=w∈V∑Auw(An)wv=An+1
结论在有向图上同样适用,得到的 P ( 1 ) , P ( 2 ) , . . . P^{(1)},P^{(2)},... P(1),P(2),...称为Katz索引。
图核
图核(graph kernels)用于衡量图的相似性。
举个最简单的例子,对于两个图 G 1 = ( V 1 , E 1 ) G_1=(V_1,E_1) G1=(V1,E1)与 G 2 = ( V 2 , E 2 ) G_2=(V_2,E_2) G2=(V2,E2),执行某种图分解算法 F \mathcal{F} F:
F ( G 1 ) = { S 11 , S 12 , . . . , S 1 n 1 } F ( G 2 ) = { S 21 , S 22 , . . . , S 1 n 2 } \mathcal{F}(G_1)=\{S_{11},S_{12},...,S_{1n_1}\}\\ \mathcal{F}(G_2)=\{S_{21},S_{22},...,S_{1n_2}\}\\ F(G1)={S11,S12,...,S1n1}F(G2)={S21,S22,...,S1n2}
基于分解得到的子图,定义核值(kernel value):
k R ( G 1 , G 2 ) = ∑ i = 1 n 1 ∑ j = 1 n 2 δ ( S 1 i , S 2 j ) k_R(G_1,G_2)=\sum_{i=1}^{n_1}\sum_{j=1}^{n_2}\delta(S_{1i},S_{2j}) kR(G1,G2)=i=1∑n1j=1∑n2δ(S1i,S2j)
其中 δ \delta δ函数在两子图同构时取 1 1 1,否则取 0 0 0,这样就将大的图同构问题转化为小的图同构问题,不同的分解算法 F \mathcal{F} F和不同的同构定义 δ \delta δ可以得到不同的图核计算方式。
此外还可以使用一些其他的图特征向量表示手段:
-
统计图中不同度数的节点数量,构成一个特征向量;
-
统计图中不同图基元的数量,构成一个特征向量;
笔者注:图基元的统计是非常复杂的,若图节点度数不超过 d d d,则统计节点数不超过 k k k的图基元的时间复杂度为 O ( ∣ V ∣ d k − 1 ) O(|V|d^{k-1}) O(∣V∣dk−1);
然后计算特征向量之间的相似度。
最后一种经典的算法是重染色(color refinement):
-
首先给全图每一个节点都染上初始颜色 c ( 0 ) ( v ) c^{(0)}(v) c(0)(v)
-
然后进行 n n n轮迭代染色( n n n为超参数):
c ( k + 1 ) ( v ) = Hash ( { c ( k ) ( v ) , { c ( k ) ( u ) } u ∈ N ( v ) } ) c^{(k+1)}(v)=\text{Hash}(\{c^{(k)}(v),\{c^{(k)}(u)\}_{u\in N(v)}\}) c(k+1)(v)=Hash({c(k)(v),{c(k)(u)}u∈N(v)})
其中 H a s h \rm Hash Hash函数将不同的输入映射成不同的数值; -
最后将具有同样染色序列(即 { c ( 0 ) ( v ) , c ( 1 ) ( v ) , . . . , c ( n ) ( v ) } \{c^{(0)}(v),c^{(1)}(v),...,c^{(n)}(v)\} {c(0)(v),c(1)(v),...,c(n)(v)})的节点定义为同类型的节点,统计各类型节点的数量构成特征向量;
这种算法运行速度要远远快于统计图基元的做法。
节点嵌入之随机游走
随机游走(random walks)的思想源于如果从 u u u出发大概率能走到 v v v,那么这表明两个节点是相似的。
首先定义几个标记:
-
z u z_u zu:表示节点 u u u的嵌入;
-
P ( v ∣ z u ) P(v|z_u) P(v∣zu):从节点 u u u出发,随机游走到节点 v v v的(预测)概率;
那么我们认为 z u ⊤ z v z^\top_u z_v zu⊤zv近似等于 u u u和 v v v将会同时出现在一条随机游走路径中的概率。通常我们会固定随机游走的长度为一个固定值且不会太大,长度为 1 1 1时退化为邻接点搜索。
具体而言,从节点 u u u出发,根据某种随机游走的策略进行序列生成,然后优化各个节点的嵌入表示以拟合上述概率:
maximize f : u → R d ∑ u ∈ V log P ( N R ( u ) ∣ z u ) \text{maximize}_{f:u\rightarrow \R^d}\sum_{u\in V}\log P(N_R(u)|z_u) maximizef:u→Rdu∈V∑logP(NR(u)∣zu)
其中 f f f是节点嵌入映射, N R ( u ) N_R(u) NR(u)表示从节点 u u u出发,在策略 R R R下随机游走能够抵达的所有近邻(neighborhood),实际仿真中 N R ( u ) N_R(u) NR(u)就等于从节点 u u u出发抵达的节点集合。
上式中的目标函数本质上就是最大似然,即给定节点 u u u的情况下,预测它的近邻节点:
L = ∑ u ∈ V ∑ v ∈ N R ( u ) − log ( P ( v ∣ z u ) ) \mathcal{L}=\sum_{u\in V}\sum_{v\in N_R(u)}-\log(P(v|z_u)) L=u∈V∑v∈NR(u)∑−log(P(v∣zu))
我们可以使用softmax函数来计算上式中的概率值:
P ( v ∣ z u ) = exp ( z u ⊤ z v ) ∑ n ∈ V exp ( z u ⊤ z n ) P(v|z_u)=\frac{\exp(z_u^\top z_v)}{\sum_{n\in V}\exp(z_u^\top z_n)} P(v∣zu)=∑n∈Vexp(zu⊤zn)exp(zu⊤zv)
这里又提到计算softmax函数的复杂度很高(主要是分母的计算太复杂),因此需要做负采样:
log ( exp ( z u ⊤ z v ) ∑ n ∈ V exp ( z u ⊤ z n ) ) ≈ log ( σ ( z u ⊤ z v ) ) − ∑ i = 1 k log ( σ ( z u ⊤ z n i ) ) \log\left(\frac{\exp(z_u^\top z_v)}{\sum_{n\in V}\exp(z_u^\top z_n)}\right)\approx\log(\sigma(z_u^\top z_v))-\sum_{i=1}^k\log(\sigma(z_u^\top z_{n_i})) log(∑n∈Vexp(zu⊤zn)exp(zu⊤zv))≈log(σ(zu⊤zv))−i=1∑klog(σ(zu⊤zni))
其中 σ ( ⋅ ) \sigma(\cdot) σ(⋅)是sigmoid激活函数, n i ∼ P V n_i\sim P_V ni∼PV是随机采样得到的节点,此时无需计算softmax分母上所有节点的点积,只需要对采样得到的 k k k个随机负样本 n i n_i ni进行计算即可。负样本量 k k k的取值通常在 5 5 5到 20 20 20,采样概率分布与节点的度数成正比。
最后说明随机游走策略 R R R的选取,这里只介绍一种偏差随机游走(biased random walks)方法:
-
每次定义往回走(即回到前一个节点)的概率 1 / p 1/p 1/p和不往回走的概率 1 / q 1/q 1/q
-
对于偏向于广度优先搜索的随机游走,赋予 p p p以较低的值(即大概率往回走);
-
对于偏向于深度优先搜索的随机游走,赋予 q q q以较低的值(即大概率往下走);
这里的概率都是未经标准化过的概率,一般来说会在往下走的节点里面找到一个节点编号最小的(即深度优先搜索默认的下一个节点)来赋予它的概率权重为 1 1 1(同样是未经标准化的),然后将一大堆 1 / q 1/q 1/q和 1 , 1 / p 1,1/p 1,1/p进行标准化后得到最终的概率值。
一些其他随机游走方法的相关研究:
-
不同种类的偏差随机游走:
基于节点属性:参考文献
基于学习到的权重:参考文献
-
其他优化方法:
直接基于一级(one-hop)和二级(two-hop)的随机游走概率:参考文献
-
网络处理技术:
在各种原始网络变体上运行随机游走:参考文献,参考文献
整图嵌入
-
方法一:计算每个节点的嵌入并累和。
z G = ∑ v ∈ V z v z_G=\sum_{v\in V}z_v zG=v∈V∑zv
这个方法在参考文献中有使用。 -
方法二:引入一个虚拟节点来表示整图(或子图),然后计算虚拟节点的嵌入。
这个方法似乎只能用于子图嵌入的学习,整图就只有一个虚拟节点无法学习。在参考文献首次提出。
-
方法三:匿名游走嵌入(anonymous walk embeddings)。
参考文献首次提出,具体操作如下所示:
-
首先还是若干次随机游走采样,只不过这次记录随机游走的节点序列的方式稍有变化,一般情况下我们记录的是ABCBC,这里因为是匿名,所以记录为 12312 12312 12312,注意到在匿名的情况下ABCBC与DEFEF是完全没有区别的。
-
在匿名的条件下,不同长度的随机游走序列的数量如下图所示:
随机游走序列长度 不同随机游走序列数量 2 2 2 2 2 2 3 3 3 5 5 5 4 4 4 15 15 15 5 5 5 52 52 52 6 6 6 203 203 203 7 7 7 877 877 877 8 8 8 3 × 1 0 3 3\times 10^3 3×103 9 9 9 2.1 × 1 0 4 2.1\times 10^4 2.1×104 10 10 10 1.16 × 1 0 5 1.16\times 10^5 1.16×105 11 11 11 6.79 × 1 0 5 6.79\times 10^5 6.79×105 12 12 12 4 × 1 0 6 4\times 10^6 4×106 以长度为 3 3 3为例,不同的序列有 111 , 112 , 121 , 122 , 123 111,112,121,122,123 111,112,121,122,123
-
然后以匿名的方式,采样 m m m条随机游走路径(用于刻画图的一个概率分布):
m = ⌈ 2 ϵ 2 ( log ( 2 η − 2 ) − log ( δ ) ) ⌉ m=\left\lceil\frac2{\epsilon^2}(\log(2^\eta-2)-\log(\delta))\right\rceil m=⌈ϵ22(log(2η−2)−log(δ))⌉
其中 η \eta η是上表中给定长度的匿名随机游走序列的种类数(如采样长度为 7 7 7时 η = 877 \eta=877 η=877),并期望有不超过 δ \delta δ的概率得到的分布误差超过 ϵ \epsilon ϵ -
接着直接学习每一条匿名随机游走序列的嵌入表示 z i , i = 1 , . . . , η z_i,i=1,...,\eta zi,i=1,...,η
-
最后将学习得到的所有 z i z_i zi通过某种运算得到整图嵌入 z G z_G zG:
maximize z G ∑ t = Δ + 1 T log P ( w t ∣ w t − Δ , . . . , w t − 1 , z G ) \text{maximize}_{z_G}\sum_{t=\Delta+1}^T\log P(w_t|w_{t-\Delta},...,w_{t-1},z_G) maximizezGt=Δ+1∑TlogP(wt∣wt−Δ,...,wt−1,zG)
上式中目标函数的含义是来预测在一个大小为 Δ \Delta Δ的窗口内,同一个匿名随机游走序列同时出现的概率, T T T表示采样得到的随机游走序列的数量。举个例子,采样得到 w 1 = 1232 , w 2 = 1234 , w 3 = 1232 , w 4 = 1212 w_1=1232,w_2=1234,w_3=1232,w_4=1212 w1=1232,w2=1234,w3=1232,w4=1212,固定 Δ = 2 \Delta=2 Δ=2,则预测 w 3 w_3 w3在给定 w 1 , w 2 w_1,w_2 w1,w2下出现的概率。
-
但是提出文里的操作稍有区别,这里的采样通常是从一个固定节点 u u u出发,采样 T T T条长度为 l l l的随机游走序列:
N R ( u ) = { w 1 u , w 2 u . . . , w T u } N_R(u)=\{w_1^u,w_2^u...,w_T^u\} NR(u)={w1u,w2u...,wTu}
然后预测随机游走序列同时出现在大小为 Δ \Delta Δ的窗口内的概率, w i w_i wi的嵌入为 z i z_i zi:
maximize z i , z G 1 T ∑ t = Δ T log P ( w t ∣ w t − Δ , . . . , w t − 1 , z G ) \text{maximize}_{z_i,z_G}\frac1T\sum_{t=\Delta}^T\log P(w_t|w_{t-\Delta},...,w_{t-1},z_G) maximizezi,zGT1t=Δ∑TlogP(wt∣wt−Δ,...,wt−1,zG)
其中:
P ( w t ∣ w t − Δ , . . . , w t − 1 , z G ) = exp ( y ( w t ) ) ∑ i = 1 η exp ( y ( w i ) ) y ( w t ) = b + U ⋅ ( concat ( 1 Δ ∑ i = 1 Δ z i , z G ) ) P(w_t|w_{t-\Delta},...,w_{t-1},z_G)=\frac{\exp(y(w_t))}{\sum_{i=1}^\eta \exp(y(w_i))}\\ y(w_t)=b+U\cdot\left(\text{concat}\left(\frac1\Delta\sum_{i=1}^\Delta z_i,z_G\right)\right) P(wt∣wt−Δ,...,wt−1,zG)=∑i=1ηexp(y(wi))exp(y(wt))y(wt)=b+U⋅(concat(Δ1i=1∑Δzi,zG))
同理上式softmax概率的计算依然需要使用负采样来简化, concat \text{concat} concat部分的意思是先将各个随机游走序列的嵌入取均值,再和整图嵌入 z G z_G zG拼接起来, b ∈ R , U ∈ R D b\in \R,U\in\R^D b∈R,U∈RD是需要学习的参数,其实就是一个全连接层。 -
最终我们得到了整图嵌入 z G z_G zG,有人可能以为 z G z_G zG就是各个 z i z_i zi加权求和或者拼接得到的,提出文里说得很明确, z G z_G zG和 z i z_i zi一样,都是独立的决策变量。
-
PageRank算法
计算PageRank的方法有点类似计算马尔可夫链中的稳态概率,原始的PageRank做了一个很强的假定,即一个页面指出去的所有链接都是等权重的,这构成了一个特殊的马尔克夫矩阵 M M M。然后计算 r = M r r=Mr r=Mr即可得到所有页面的权重构成的权重向量 r r r
求解 r = M r r=Mr r=Mr有很多近似迭代算法,最简单的方法就是初始化 r r r是等权重的,然后每次迭代 r ← M r r\leftarrow Mr r←Mr即可收敛。
但是PageRank算法存在两个问题:
-
页面是死胡同(没有指出链接),就会造成页面重要性泄漏;
解决方案:让死胡同节点以等概率指向所有其他页面。
-
页面所有的指出链接都属于同一个group,即存在一大堆页面构成的孤岛区域,此时页面重要性就会被这个孤岛吸收掉,这称为蛛网陷阱(spider traps)。
解决方案:每次随机游走以小概率跳到随机页面中。
r j = ∑ i → j r i ( t ) d i ⟶ r j = ∑ i → j β ⋅ r i ( t ) d i + ( 1 − β ) ⋅ 1 N r = M r ⟶ β M + ( 1 − β ) [ 1 N ] N × N r_j=\sum_{i\rightarrow j}\frac{r_i^{(t)}}{d_i}\longrightarrow r_j=\sum_{i\rightarrow j}\beta\cdot\frac{r_i^{(t)}}{d_i}+(1-\beta)\cdot\frac1 N\\ r=Mr\longrightarrow\beta M+(1-\beta)\left[\frac1N\right]_{N\times N} rj=i→j∑diri(t)⟶rj=i→j∑β⋅diri(t)+(1−β)⋅N1r=Mr⟶βM+(1−β)[N1]N×N
一般 β = 0.8 , 0.9 \beta=0.8,0.9 β=0.8,0.9
非常简单的例子,两个页面, a → b a\rightarrow b a→b,此时就会发生死胡同问题;如果是 a → b , b → b a\rightarrow b,b\rightarrow b a→b,b→b,则会发生蛛网陷阱问题。
二分图推荐
常见的商品和用户(购买与评分)会构成二分图的关系,根据这样的关系可以对用户进行商品推荐,如查询与某个商品关联度最高的另一个商品。
从路径的角度来看,可以计算两个商品之间的距离,但是只看距离肯定是不够的,比如两个商品被同一个人购买,与两个商品被同一群人购买,这两个商品的相似度肯定是不一样的。
因此类似PageRank,我们认为每个商品都有一个重要性,可以通过随机游走来衡量这种重要性,算法代码如下:
item = QUERY_NODES.sample_by_weight()
for i in range(N_STEPS):
user = item.get_random_neighbor()
item = user.get_random_neighbor()
item.visit_count += 1
if random() < ALPHA: # 跳转
item = QUERY_NODES.sample_by_weight()
比如上面代码从 QUEY_NODES = { Q } \text{QUEY\_NODES}=\{Q\} QUEY_NODES={Q}出发,设定 ALPHA = 0.5 \text{ALPHA}=0.5 ALPHA=0.5,我们可以统计每个商品被访问的次数,然后即可得到与 Q Q Q相似度最高的商品集合。
这种算法考虑到了商品和用户之间的多重联系、多重路径,直接与间接联系,因此是具有很高可信度的。
节点分类之消息传递
-
场景:图中一些节点已有标签,如何给其他节点赋上标签?
-
算法:
P ( Y v = c ) = 1 ∑ ( v , u ) ∈ E A v , u ∑ ( v , u ) ∈ E A v , u P ( Y u = c ) P(Y_v=c)=\frac{1}{\sum_{(v,u)\in E}A_{v,u}}\sum_{(v,u)\in E}A_{v,u}P(Y_u=c) P(Yv=c)=∑(v,u)∈EAv,u1(v,u)∈E∑Av,uP(Yu=c)
其中 Y v Y_v Yv表示节点 v v v的标签, A A A是邻接矩阵(值可以是边的权重)。这样就将每个节点的标签信息进行了传播。
注意上式的收敛性不能得到保证。
-
具体而言,首先将每个节点的标签概率赋好,有标签的直接给对应标签赋确定概率,没有标签的给每个标签赋等概率值。然后通过上面的消息传递算法进行迭代。
当然节点分类也可以直接用节点的特征向量来表示(用 z v z_v zv来预测 Y c Y_c Yc),有一个经典算法是迭代分类器(iterative classifier),在迭代过程中不断修正 z v z_v zv和 Y c Y_c Yc,不过个人觉得直接用机器学习来得容易些。
后面还有一个Correct & Smooth的分类器,重点是预测分类完之后做的后处理算法,看起来很高端,但是我觉得好像没有什么用,感觉很像是对训练残差做二次训练。找到一篇论文精读和实现的博客,可以参考,不一定有用。
置换等变异性
置换等变异性(permutation equivariance)是说图节点本身没有次序可言,定义一个图 G = ( A , X ) G=(A,X) G=(A,X),其中 A A A是邻接矩阵, X X X是所有节点特征向量拼成的特征矩阵,对于不同次序的节点编号, A , X A,X A,X的行列可能是需要置换的,那么如果存在一个函数 f f f,使得对于任意两个不同次序的节点编号得到的 A i , X i A_i,X_i Ai,Xi和 A j , X j A_j,X_j Aj,Xj,都有 f ( A i , X i ) = f ( A j , X j ) f(A_i,X_i)=f(A_j,X_j) f(Ai,Xi)=f(Aj,Xj)成立,则称 f f f是置换等变异性函数。
GCN(mean-pool)
[Kipf & Welling, ICLR 2017]
-
思想:节点的近邻定义了一个计算图(computational graph),即每个节点可以根据近邻的边来聚合近邻的信息。
-
基本方法:对近邻节点的信息取平均实现消息传递。
h v ( k + 1 ) = σ ( W k ∑ u ∈ N ( v ) h u ( k ) ∣ N ( v ) ∣ + B k h v ( k ) ) k = 0 , 1 , . . . , K − 1 h_v^{(k+1)}=\sigma\left(W_k\sum_{u\in N(v)}\frac{h_u^{(k)}}{|N(v)|}+B_kh_v^{(k)}\right)\quad k=0,1,...,K-1 hv(k+1)=σ⎝⎛Wku∈N(v)∑∣N(v)∣hu(k)+Bkhv(k)⎠⎞k=0,1,...,K−1
其中 h v ( n ) h_v^{(n)} hv(n)是节点 v v v在网络第 n n n层的信息, K K K是总网络层数, W k W_k Wk和 B k B_k Bk是可学习的参数。通过某种方法初始化 h v ( 0 ) h_v^{(0)} hv(0),最后一层的输出作为节点嵌入 z v = h v ( K ) z_v=h_v^{(K)} zv=hv(K)
可以改写为矩阵形式:
H ( k + 1 ) = σ ( A ~ H ( k ) W k ⊤ + H ( k ) B k ⊤ ) H^{(k+1)}=\sigma(\tilde AH^{(k)}W_k^\top+H^{(k)}B_k^\top) H(k+1)=σ(A~H(k)Wk⊤+H(k)Bk⊤)
其中 H ( k ) = [ h 1 ( k ) , . . . , h ∣ V ∣ ( k ) ] ⊤ , A ~ = D − 1 A H^{(k)}=[h_1^{(k)},...,h_{|V|}^{(k)}]^\top,\tilde A=D^{-1}A H(k)=[h1(k),...,h∣V∣(k)]⊤,A~=D−1A, D D D是节点度数对角矩阵。 -
图卷积层是置换等变异性函数
-
一般损失函数可以定义为:
L = ∑ z u , z v CE ( y u , v , DEC ( z u , z v ) ) \mathcal{L}=\sum_{z_u,z_v}\text{CE}(y_{u,v},\text{DEC}(z_u,z_v)) L=zu,zv∑CE(yu,v,DEC(zu,zv))
其中 y u , v y_{u,v} yu,v是标签值,在 u , v u,v u,v相似时标注为 1 1 1,否则为 0 0 0(其实一般只有 u = v u=v u=v才标注为 1 1 1), DEC \text{DEC} DEC可以理解为向量内积,外面套着的是交叉熵。 -
与CNN的对比:显然CNN就是一种特殊的GNN。
-
与Transformer的对比:事实上Transformer也可以看作是一种特殊的GNN,它的计算图就是一个完全图(所有输入分词看作节点,节点之间相互有边相连)。
消息计算与消息聚合
广义上的GNN网络层的逻辑由消息计算和消息聚合两步组成,合在一起就是消息传递。
-
消息计算:
m u ( l ) = MSG ( l ) ( h u ( l − 1 ) ) u ∈ { N ( v ) ∪ v } m_u^{(l)}=\text{MSG}^{(l)}(h_u^{(l-1)})\quad u\in\{N(v)\cup v\} mu(l)=MSG(l)(hu(l−1))u∈{N(v)∪v}
每个节点生成信息,用于传递给其他节点,最简单的形式如 m u ( l ) = W ( l ) h u ( l − 1 ) m_u^{(l)}=W^{(l)}h_u^{(l-1)} mu(l)=W(l)hu(l−1) -
消息聚合:
h v ( l ) = AGG ( { m u ( l ) , u ∈ N ( v ) } ) h_v^{(l)}=\text{AGG}(\{m_u^{(l)},u\in N(v)\}) hv(l)=AGG({mu(l),u∈N(v)})
简单的聚合函数 AGG \text{AGG} AGG可以是求和、取平均、取最大值等。这里有一个问题就是我们可能担心节点 v v v自己的信息发生丢失,因此常见的改进可以是:
h v ( l ) = CONCAT ( AGG ( { m u ( l ) , u ∈ N ( v ) } ) , m v ( l ) ) h_v^{(l)}=\text{CONCAT}(\text{AGG}(\{m_u^{(l)},u\in N(v)\}),m_v^{(l)}) hv(l)=CONCAT(AGG({mu(l),u∈N(v)}),mv(l))
即直接把上一层节点 v v v产生的消息拼接进来。
通常来说GNN中进行BatchNorm和Dropout(随机丢弃图中节点,剩下节点构成子图)也是很必要的。
GraphSage(max-pool)
[NeurIPS 2017]
GCN显然可以套用上面的形式,记录一个常用的GraphSAGE层:
h v ( l ) = σ ( W ( l ) ⋅ CONCAT ( h v ( l − 1 ) , AGG ( { h u ( l − 1 ) , ∀ u ∈ N ( v ) } ) ) ) h_v^{(l)}=\sigma(W^{(l)}\cdot\text{CONCAT}(h_v^{(l-1)},\text{AGG}(\{h_u^{(l-1)},\forall u\in N(v)\}))) hv(l)=σ(W(l)⋅CONCAT(hv(l−1),AGG({hu(l−1),∀u∈N(v)})))
常用的聚合方法有:
-
平均:
AGG = ∑ u ∈ N ( v ) h u ( l − 1 ) ∣ N ( v ) ∣ \text{AGG}=\sum_{u\in N(v)}\frac{h_u^{(l-1)}}{|N(v)|} AGG=u∈N(v)∑∣N(v)∣hu(l−1) -
池化:
AGG = MEAN ( { MLP ( h u ( l − 1 ) , ∀ u ∈ N ( v ) ) } ) \text{AGG}=\text{MEAN}(\{\text{MLP}(h_u^{(l-1)},\forall u\in N(v))\}) AGG=MEAN({MLP(hu(l−1),∀u∈N(v))}) -
LSTM:
AGG = LSTM ( [ h u ( l − 1 ) , ∀ u ∈ π ( N ( v ) ) ] ) \text{AGG}=\text{LSTM}([h_u^{(l-1)},\forall u\in \pi(N(v))]) AGG=LSTM([hu(l−1),∀u∈π(N(v))])
π \pi π表示对近邻进行打乱顺序。
此外GraphSage中对隐层状态进行正则化:
h v ( l ) ← h v ( l ) ∥ h v ( l ) ∥ 2 h_v^{(l)}\leftarrow \frac{h_v^{(l)}}{\|h_v^{(l)}\|_2} hv(l)←∥hv(l)∥2hv(l)
否则生成的节点嵌入的尺度会不一样。
GAT
图注意力网络(Graph Attention Networks,GAT):
h v ( l ) = σ ( ∑ u ∈ N ( v ) α v u W ( l ) h u ( l − 1 ) ) h_v^{(l)}=\sigma\left(\sum_{u\in N(v)}\alpha_{vu}W^{(l)}h_u^{(l-1)}\right) hv(l)=σ⎝⎛u∈N(v)∑αvuW(l)hu(l−1)⎠⎞
在GCN或GraphSage中, α v u = 1 / ∣ N ( v ) ∣ \alpha_{vu}=1/|N(v)| αvu=1/∣N(v)∣是等权重的,这里会类似注意力机制,根据节点相似性一个注意力权重。
一些常见的做法:
-
定义注意力函数 a a a,得到一个得分值:
e v u = a ( W ( l ) h u ( l − 1 ) , W ( l ) h v ( l − 1 ) ) e_{vu}=a(W^{(l)}h_u^{(l-1)},W^{(l)}h_v^{(l-1)}) evu=a(W(l)hu(l−1),W(l)hv(l−1))
比如可以是:
e v u = Linear ( Concat ( W ( l ) h u ( l − 1 ) , W ( l ) h v ( l − 1 ) ) ) e_{vu}=\text{Linear}(\text{Concat}(W^{(l)}h_u^{(l-1)},W^{(l)}h_v^{(l-1)})) evu=Linear(Concat(W(l)hu(l−1),W(l)hv(l−1))) -
使用softmax函数计算得分值的权重分布:
α v u = exp ( e v u ) ∑ w ∈ N ( v ) exp ( e v w ) \alpha_{vu}=\frac{\exp(e_{vu})}{\sum_{w\in N(v)}\exp(e_{vw})} αvu=∑w∈N(v)exp(evw)exp(evu)
此外还可以是多头注意力,即多用几个不同的注意力函数 a a a,生成不同的权重 α v u \alpha_{vu} αvu,然后对结果取聚合:
h v 1 ( l ) = σ ( ∑ u ∈ N ( v ) α v u 1 W ( l ) h u ( l − 1 ) ) h v 2 ( l ) = σ ( ∑ u ∈ N ( v ) α v u 2 W ( l ) h u ( l − 1 ) ) h v 3 ( l ) = σ ( ∑ u ∈ N ( v ) α v u 3 W ( l ) h u ( l − 1 ) ) } ⇒ h v ( l ) = AGG ( h v 1 ( l ) , h v 2 ( l ) , h v 3 ( l ) ) \left.\begin{aligned} h_{v1}^{(l)}=\sigma\left(\sum_{u\in N(v)}\alpha_{vu}^{1}W^{(l)}h_u^{(l-1)}\right)\\ h_{v2}^{(l)}=\sigma\left(\sum_{u\in N(v)}\alpha_{vu}^{2}W^{(l)}h_u^{(l-1)}\right)\\ h_{v3}^{(l)}=\sigma\left(\sum_{u\in N(v)}\alpha_{vu}^{3}W^{(l)}h_u^{(l-1)}\right) \end{aligned}\right\}\Rightarrow h_v^{(l)}=\text{AGG}(h_{v1}^{(l)},h_{v2}^{(l)},h_{v3}^{(l)}) hv1(l)=σ⎝⎛u∈N(v)∑αvu1W(l)hu(l−1)⎠⎞hv2(l)=σ⎝⎛u∈N(v)∑αvu2W(l)hu(l−1)⎠⎞hv3(l)=σ⎝⎛u∈N(v)∑αvu3W(l)hu(l−1)⎠⎞⎭⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎫⇒hv(l)=AGG(hv1(l),hv2(l),hv3(l))
比如 AGG \text{AGG} AGG函数可以直接就是拼接,这样信息损失得最少。
GNN使用技巧
-
图结构增强:
① 图太稀疏,则添加虚拟节点或虚拟边(比如将二级近邻之间也连上边,或者直接 A + A 2 A+A^2 A+A2)。
② 图太稠密,则消息传递时选择对近邻进行采样。
③ 图太庞大,则采样子图计算子图的嵌入,如可以通过重复的随机游走来采样,但要尽可能保持原始图的连通性(从消息传递的角度来说是这样的)。
-
图特征增强:比如使用节点的度数、聚类稀疏、PageRank、中心度等。
-
GNN训练管道:输入图 → \rightarrow →GNN网络层迭代 → \rightarrow →得到节点嵌入(或每个节点的隐层表示) → \rightarrow →得到预测头(prediction head,节点级别、边级别、图级别的任务涉及不同的预测头,通常都由节点嵌入通过运算得到) → \rightarrow →得到预测结果 → \rightarrow →评估指标与损失函数。
-
节点级别的预测头:直接 Head ( z u ) = W z u \text{Head}(z_u)=Wz_u Head(zu)=Wzu(节点嵌入输入到一个全连接层)
-
边级别的预测头: Head ( z u , z v ) \text{Head}(z_u,z_v) Head(zu,zv),简单的方法就是拼起来然后输入到全连接层,即 Linear ( Concat ( ⋅ , ⋅ ) ) \text{Linear}(\text{Concat}(\cdot,\cdot)) Linear(Concat(⋅,⋅)),也可以取点积 z u ⊤ z v z_u^\top z_v zu⊤zv(这个只能输出一个标量),或是二次型 z u ⊤ W z v z_u^\top Wz_v zu⊤Wzv(这个可以多用几个不同的 W W W,将得到的标量结果拼起来,得到的是一个向量)
-
图级别的预测头:这个就与GNN网络层中的 AGG \text{AGG} AGG函数没什么两样了,取均值,最大值,求和等等。
-
层级图池化(hierarchical global pooling):
直接对所有节点嵌入的每一维进行池化是不合理的,这样嵌入的每一维都容易损失很多信息,因此可以两个两个进行池化,这样就少损失一些。
举个例子,对所有数字进行求和池化: Sum ( { − 1 , − 2 , 0 , 1 , 2 } ) = 0 \text{Sum}(\{-1,-2,0,1,2\})=0 Sum({−1,−2,0,1,2})=0, Sum ( { − 10 , − 20 , 0 , 10 , 20 } ) = 0 \text{Sum}(\{-10,-20,0,10,20\})=0 Sum({−10,−20,0,10,20})=0,这两个就没有区别了,但是两个两个使用 ReLU ( Sum ( ⋅ , ⋅ ) ) \text{ReLU}(\text{Sum}(\cdot,\cdot)) ReLU(Sum(⋅,⋅))来池化,就很不一样了。
-
图划分:用于划分训练集,验证集和测试集,对于那种很大的图上的分类问题,一般就是随机采样节点得到子图作为验证集和测试集,剩下的大部分节点构成的子图作为训练集(注意这种做法要多随机划分几次,报告不同随机种子下的训练情况),这种配置称为是Inductive的。
注意只用子图可能也会影响图结构,因此有时候会选择Transductive的配置,即训练、验证都用全图,只不过训练时只计算训练集中节点或边的计算损失函数,验证时用验证集中节点或边的标签计算评估指标。
GIN
[ICLR 2019]
图同形网络(graph isomorphsim network):
MLP Φ ( ∑ x ∈ S MLP f ( x ) ) \text{MLP}_{\Phi}\left(\sum_{x\in S}\text{MLP}_f(x)\right) MLPΦ(x∈S∑MLPf(x))
GIN的近邻聚合函数是单射(injective),GIN是目前最具有区分度的GNN(消息传递类型的GNN)!
GCN和GraphSAGE的聚合函数可能会将不同的multi-set输入映射成同样的输出,因此不是那么具有区分度,理想的那种将multi-set输入进行单射的函数应当形如:
Φ ( ∑ x ∈ S f ( x ) ) \Phi\left(\sum_{x\in S}f(x)\right) Φ(x∈S∑f(x))
其中 Φ \Phi Φ和 f f f都是非线性函数, S S S是multi-set输入(比如所有近邻的信息)。
记得前文提过的那个重染色法的 Hash \text{Hash} Hash函数就是一个单射,GIN相当于是用神经网络来模拟单射的 Hash \text{Hash} Hash函数:
c ( k + 1 ) ( v ) = Hash ( c ( k ) ( v ) , { c ( k ) ( u ) } u ∈ N ( v ) ) c^{(k+1)}(v)=\text{Hash}(c^{(k)}(v),\{c^{(k)}(u)\}_{u\in N(v)}) c(k+1)(v)=Hash(c(k)(v),{c(k)(u)}u∈N(v))
建模即为:
MLP Φ ( ( 1 + ϵ ) ⋅ MLP f ( c ( k ) ( v ) ) + ∑ u ∈ N ( v ) MLP f ( c ( k ) ( u ) ) ) \text{MLP}_{\Phi}\left((1+\epsilon)\cdot\text{MLP}_f(c^{(k)}(v))+\sum_{u\in N(v)}\text{MLP}_f(c^{(k)}(u))\right) MLPΦ⎝⎛(1+ϵ)⋅MLPf(c(k)(v))+u∈N(v)∑MLPf(c(k)(u))⎠⎞
上面这种单射提升的是GNN的expressive power
异构图
异构 G = ( V , E , R , T ) G=(V,E,R,T) G=(V,E,R,T):
- v i ∈ V v_i\in V vi∈V
- ( v i , r , v j ) ∈ E (v_i,r,v_j)\in E (vi,r,vj)∈E,带关系的边
- 节点类型: T ( v i ) T(v_i) T(vi)
- 关系类型 r ∈ R r\in R r∈R
RGCN
即关系型图卷积网络(Relational GCN),图的边上带有关系标签:
h v ( l + 1 ) = σ ( ∑ r ∈ R ∑ u ∈ N v r 1 c v , r W r ( l ) h u ( l ) + W o ( l ) h v ( l ) ) h_v^{(l+1)}=\sigma\left(\sum_{r\in R}\sum_{u\in N_v^r}\frac1{c_{v,r}}W_r^{(l)}h_u^{(l)}+W_o^{(l)}h_v^{(l)}\right) hv(l+1)=σ⎝⎛r∈R∑u∈Nvr∑cv,r1Wr(l)hu(l)+Wo(l)hv(l)⎠⎞
其中 c v , r = ∣ N v r ∣ c_{v,r}=|N_v^r| cv,r=∣Nvr∣,即以关系 r r r连接的邻接点数量。同样上式符合消息生成与消息聚合的形式。
每个关系 r r r对应 L L L个矩阵(网络共有 L L L层): W r ( 1 ) , . . . , W r ( L ) W_r^{(1)},...,W_r^{(L)} Wr(1),...,Wr(L),其中 W r ( l ) ∈ d ( l + 1 ) × d ( l ) W_r^{(l)}\in d^{(l+1)}\times d^{(l)} Wr(l)∈d(l+1)×d(l)
一般来说,需要对 W r ( l ) W_r^{(l)} Wr(l)进行贵正则化,比如令 W r ( l ) W_r^{(l)} Wr(l)是对角块矩阵,或是令 W r = ∑ b = 1 B a r b ⋅ V b W_r=\sum_{b=1}^Ba_{rb}\cdot V_b Wr=∑b=1Barb⋅Vb,其中 V b V_b Vb是所有关系共用的一个矩阵(基础矩阵)。
-
RGCN用于链接预测:
① 首先RGCN对训练监督的边 ( E , r 3 , A ) (E,r_3,A) (E,r3,A)进行评分
② 构建一个负边(negative edge,即加一条假边) ( E , r 3 , B ) (E,r_3,B) (E,r3,B)
③ RGCN对负边进行评分
④ 目标函数包括最大化训练监督的边的得分和最小化负边的得分:
l = − log σ ( f r 3 ( h E , h A ) ) − log ( 1 − σ ( f r 3 ( h E , h B ) ) ) l=-\log\sigma(f_{r_3}(h_E,h_A))-\log(1-\sigma(f_{r_3}(h_E,h_B))) l=−logσ(fr3(hE,hA))−log(1−σ(fr3(hE,hB)))
知识表示学习
知识图谱中关系类型:
- 对称关系(家人,室友):来回的关系一样;
- 互逆关系(导师,学生):来回的关系不一样;
- 复合关系(妈妈的爸爸是公公):关系叠加;
- 一对多关系(老师有多个学生): ( h , r ) (h,r) (h,r)指向多个 t t t
- 反对称(antisymmetric)关系:上位词(hypernym)和下位词, r ( h , t ) ⇒ not r ( t , h ) r(h,t)\Rightarrow\text{not }r(t,h) r(h,t)⇒not r(t,h),注意TransE可以建模反对称关系,即 h + r = t , t + r ≠ h h+r=t,t+r\neq h h+r=t,t+r=h
得分函数:
-
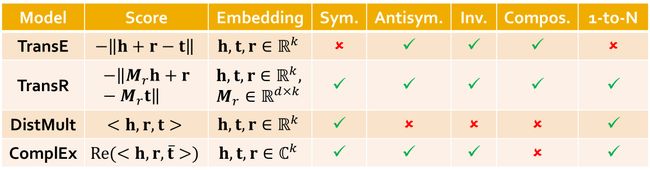
翻译类型的得分函数: f r ( h , r ) = − ∥ h + r − t ∥ ∗ f_r(h,r)=-\|h+r-t\|_* fr(h,r)=−∥h+r−t∥∗
-
TransE:
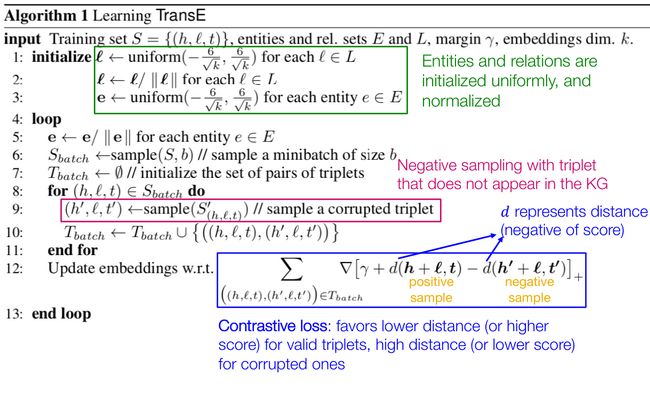
TransE可以建模互逆关系,复合关系,反对称关系,但无法建模对称关系和一对多关系。
训练的损失函数:
L = ∑ ( h , r , t ) ∈ G , ( h , r , t ′ ) ∉ G [ γ + f r ( h , t ) − f r ( h , t ′ ) ] + \mathcal{L}=\sum_{(h,r,t)\in G,(h,r,t')\notin G}[\gamma+f_r(h,t)-f_r(h,t')]_+ L=(h,r,t)∈G,(h,r,t′)∈/G∑[γ+fr(h,t)−fr(h,t′)]+ -
TransR:建模实体在空间 R d \R^d Rd中,关系在空间 R k \R^k Rk中,再来一个投影矩阵 M r ∈ R k × d M_r\in\R^{k\times d} Mr∈Rk×d(从实体空间映射到关系空间)。
① h ⊥ = M r h , t ⊥ = M r t h_{\perp}=M_rh,t_{\perp}=M_rt h⊥=Mrh,t⊥=Mrt,
② f r ( h , r ) = − ∥ h ⊥ + r − t ⊥ ∥ ∗ f_r(h,r)=-\|h_{\perp}+r-t_{\perp}\|_* fr(h,r)=−∥h⊥+r−t⊥∥∗
此时TransR可以建模对称关系,反对称关系,一对多关系互逆关系,复合关系。
-
DistMult: f r ( h , t ) = ∑ i h i r i t i f_r(h,t)=\sum_ih_ir_it_i fr(h,t)=∑ihiriti,即为连乘求和。
可以建模一对多关系,对称关系,不能建模反对称关系,互逆关系,复合关系。
-
ComplEx: f r ( h , t ) = Re ( ∑ i h i r i t ˉ i ) f_r(h,t)=\text{Re}(\sum_ih_ir_i\bar t_i) fr(h,t)=Re(∑ihiritˉi), Re \text{Re} Re表示取实部。
其中向量是在 C k \mathcal{C}^{k} Ck中建模,即是复数嵌入向量, t ˉ i \bar t_i tˉi是共轭复数。
可以建模一对多关系,对称关系,反对称关系(使用),互逆关系,但不能建模复合关系。
关于对称关系的推导:
f r ( h , t ) = Re ( ∑ i h i r i t ˉ i ) = ∑ i Re ( r i h i t ˉ i ) = ∑ i r i ⋅ Re ( h i ⋅ t ˉ i ) = ∑ i r i ⋅ Re ( h ˉ i t i ) = ∑ i Re ( r i h ˉ i t i ) = f r ( t , h ) f_r(h,t)=\text{Re}\left(\sum_ih_ir_i\bar t_i\right)=\sum_i\text{Re}(r_ih_i\bar t_i)=\sum_ir_i\cdot\text{Re}(h_i\cdot \bar t_i)=\sum_ir_i\cdot \text{Re}(\bar h_i t_i)=\sum_{i}\text{Re}(r_i\bar h_it_i)=f_r(t,h) fr(h,t)=Re(i∑hiritˉi)=i∑Re(rihitˉi)=i∑ri⋅Re(hi⋅tˉi)=i∑ri⋅Re(hˉiti)=i∑Re(rihˉiti)=fr(t,h)
知识图谱与多级推理
-
知识图谱中的查询类型:
① 一级(one-hop)查询: A → r B A\overset r\rightarrow B A→rB
② 路径查询: A → r 1 B → r 2 C A\overset {r_1}\rightarrow B\overset{r_2}\rightarrow C A→r1B→r2C(这种就是多级推理)
③ 联合(conjunctive)查询: A → r 1 C ← r 2 B A\overset{r_1}\rightarrow C\overset{r_2}\leftarrow B A→r1C←r2B
举个联合查询的例子:什么药物能够治疗乳腺癌并且引发头痛?
理想情况下,如果知识图谱足够完备,那么直接通过逻辑搜索即可解决查询问题,然而实际上知识图谱永远不可能是完整的(随着时间需要更新,人工编纂也必然遗漏信息)。
-
知识图谱补全(KGC):
遍历知识图谱中长度为 L L L路径的时间复杂度为 O ( d max L ) O(d_{\max}^L) O(dmaxL),其中 d max d_{\max} dmax为节点最大度数。
但是我们可以在向量空间中遍历知识图谱的所有关系和节点!
比如给定一级查询 ( h , r ) (h,r) (h,r),预测目标为 q = h + r q=h+r q=h+r,然后找个与 q q q最相近的 t t t即可。
多级查询 ( h , r 1 , r 2 , . . . ) (h,r_1,r_2,...) (h,r1,r2,...)同理,联合查询等价于 ( h 1 , r 1 , h 2 , r 2 ) (h_1,r_1,h_2,r_2) (h1,r1,h2,r2),那就是要找一个 t t t与 h 1 + r 1 h_1+r_1 h1+r1和 h 2 + r 2 h_2+r_2 h2+r2都接近(下面会告诉你具体怎么做)。
这种查询的思想也可以用于KGC。
-
盒嵌入(box embeddings):
可能有人注意到联合查询其实是不容易处理的,如果节点嵌入和关系嵌入学得不好,可能 h 1 + r 1 h_1+r_1 h1+r1与 h 2 + r 2 h_2+r_2 h2+r2差的很远,而且理论上 h 1 + r 1 h_1+r_1 h1+r1应该对应很多实体, h 2 + r 2 h_2+r_2 h2+r2也对应很多实体,我们要做的是在这两个集合的实体取交集。
因此可以考虑使用盒嵌入,即一类实体的嵌入(在超空间中就是一个超矩形的区域):
q = ( center ( q ) , offset ( q ) ) {\bf q}=(\text{center}(q),\text{offset}(q)) q=(center(q),offset(q))
记录这块超矩形区域的中心和边界即可,然后联合查询就化简为超矩形取交集(应该也是一块超矩形),最后的目标就是找一个实体 t t t,使得它与这块超矩形交集距离最近(需要定义点到空间的距离)。具体而言,关于盒嵌入有很多不同的做法,这里只举一种可行的做法:
① 实体嵌入都是向量,但关系嵌入是盒嵌入
② 那么 h + r h+r h+r就映射到了一块盒空间:
center ( q ′ ) = center ( q ) + center ( r ) offset ( q ′ ) = offset ( q ) + offset ( r ) \text{center}(q')=\text{center}(q)+\text{center}(r)\\ \text{offset}(q')=\text{offset}(q)+\text{offset}(r) center(q′)=center(q)+center(r)offset(q′)=offset(q)+offset(r)
③ 然后若干盒子的交集还是一个盒子(具体需要用神经网络训练这种映射):
center ( q i n t e r s e c t i o n ) = ∑ i w i ⊙ center ( q i ) w i = exp ( f c e n ( center ( q i ) ) ) ∑ j exp ( f cen ( center ( q j ) ) ) center ( q i ) ∈ R d , w i ∈ R d offset ( q i n t e r s e c t i o n ) = min ( offset ( q 1 ) , . . . , offset ( q n ) ) ⊙ σ ( f o f f ) ( offset ( q 1 ) , . . . offset ( q n ) ) ) where : ⊙ is hadamard product(element-wise product) f c e n and f o f f is neural networks w i is self-attention score \text{center}(q_{\rm intersection})=\sum_i w_i\odot \text{center}(q_i)\\ w_i=\frac{\exp(f_{\rm cen}(\text{center}(q_i)))}{\sum_j\exp(f_{\text{cen}}(\text{center}(q_j)))}\\ \text{center}(q_i)\in\R^d,w_i\in\R^d\\ \text{offset}(q_{\rm intersection})=\min(\text{offset}(q_1),...,\text{offset}(q_n))\odot\sigma(f_{\rm off})(\text{offset}(q_1),...\text{offset}(q_n)))\\ \begin{aligned} \text{where}:&\odot\text{ is hadamard product(element-wise product)}\\ &f_{cen}\text{ and }f_{\rm off} \text{ is neural networks}\\ &w_i\text{ is self-attention score} \end{aligned} center(qintersection)=i∑wi⊙center(qi)wi=∑jexp(fcen(center(qj)))exp(fcen(center(qi)))center(qi)∈Rd,wi∈Rdoffset(qintersection)=min(offset(q1),...,offset(qn))⊙σ(foff)(offset(q1),...offset(qn)))where:⊙ is hadamard product(element-wise product)fcen and foff is neural networkswi is self-attention score
④ 关于点到盒子的距离:
d box ( q , v ) = d o u t ( q , v ) + α d i n ( q , v ) d_{\text{box}}({\bf q},v)=d_{\rm out}({\bf q}, v)+\alpha d_{\rm in}({\bf q},v) dbox(q,v)=dout(q,v)+αdin(q,v)
其中 d o u t d_{\rm out} dout是点 v v v到盒子 q \bf q q边界的最短距离,然后 d i n d_{\rm in} din是从边界位置到盒子 q \bf q q中心的最短距离。 0 < α < 1 0<\alpha<1 0<α<1是正则系数。 -
与或查询(AND-OR queries):
上面这种联合查询是交集,即是与查询,那么还可能有取并集,即或查询。
注意在二维平面上,三个节点 v 1 , v 2 , v 3 v_1,v_2,v_3 v1,v2,v3构成锐角三角形时,我们总是可以两两画出盒子将两个点框起来而不框进第三个点,但是如果是钝角三角形,就无法满足这种情况了,推广到高维空间亦是如此。因此或查询要更加复杂。
结论是:对于任意 M M M个联合查询 q 1 , . . . , q M q_1,...,q_M q1,...,qM以及互不覆盖(non-overlapping)的答案,我们需要 Θ ( M ) \Theta(M) Θ(M)维的空间才能处理所有的或查询。
那么既然做与或查询这么困难,实际方法是先分别查询,然后在最后一步再取并集。
-
查询到盒子(query2box)的训练方法:
① 从训练图 G train G_{\text{train}} Gtrain中随机采样一个查询 q q q,以及答案 v ∈ [ q ] G t r a i n v\in[q]_{G_{\rm train}} v∈[q]Gtrain,以及一个负样本 v ′ ∉ [ q ] G t r a i n v'\notin[q]_{G_{\rm train}} v′∈/[q]Gtrain
② 嵌入查询 q q q
③ 计算 f q ( v ) f_q(v) fq(v)与 f q ( v ′ ) f_q(v') fq(v′)
④ 最优化损失函数 l l l(最大化 f q ( v ) f_q(v) fq(v)并最小化 f q ( v ′ ) f_q(v') fq(v′)):
l = − log σ ( f q ( v ) ) − log ( 1 − σ ( f q ( v ′ ) ) ) l=-\log\sigma(f_q(v))-\log(1-\sigma(f_q(v'))) l=−logσ(fq(v))−log(1−σ(fq(v′)))
子图与Motif
motif好像就是节点导出子图(induced subgraph),主要是用于刻画图的局部特征,motif可以视为图的一个子结构,这种子结构可能在图中有多次出现。
关于motif的几个指标
-
Z -score Z\text{-score} Z-score: Z i Z_i Zi用于刻画motif i的统计显著性
Z i = N i r e a l − N ˉ i r a n d std ( N i r a n d ) Z_i=\frac{N_i^{\rm real}-\bar N_i^{\rm rand}}{\text{std}(N_i^{\rm rand})} Zi=std(Nirand)Nireal−Nˉirand
其中 N i r e a l N_i^{\rm real} Nireal是图中motif i出现的次数, N ˉ i r a n d \bar N_i^{\rm rand} Nˉirand是在随机生成的图中motif i出现的平均次数 -
网络显著性(network significance profile):
S P i = Z i ∑ j Z j 2 SP_i=\frac{Z_i}{\sqrt{\sum_{j}Z_j^2}} SPi=∑jZj2Zi
总的来说,图越大, Z -score Z\text{-score} Z-score越高。
我们很多时候是想要在图中挖掘出出现频次很高的motif,有点类似数据挖掘里的频繁项集,但是寻找频繁motif是一个NP-hard的问题。
跟下面的神经子图匹配一样,也有通过神经方法来解决这个频繁motif挖掘的问题(但是我还是每太看懂,这两个的方法其实是很接近的,但是就是看不明白)。
神经子图匹配(没有看懂)
神经子图匹配(Neural subgraph matching)问题定义:给一个整图 G G G和一个小图 g g g,判断 g g g是否是 G G G的子图?
这个问题其实很复杂(要逐点逐边进行对比,显然是NP-hard),但我们可以使用神经网络的方法来解决(这倒是很新奇)。
思想是通过节点嵌入进行对比,但是原理每太看明白,感觉有点奇特。
推荐一篇其他人写的这章slide的博客,里面稍微记了一些笔记内容,但是不多,还是不太搞得明白。
推荐系统
问题抽象:给定用户与商品之间的交互信息,需要预测用户在将来会与哪些商品进行交互,这可以视为是链接预测问题。
TopK推荐:给每个用户至多推荐 K K K个商品,评估指标是Recall@K,即推荐的 K K K个商品中,正确的商品数占用户真实将来交互的商品数的比例( ∣ P u ∩ R u ∣ / ∣ P u ∣ |P_u\cap R_u|/|P_u| ∣Pu∩Ru∣/∣Pu∣)
-
基于嵌入的模型:定义 U U U是用户集合, V V V是商品集合, E E E是交互边
旨在计算 score ( u , v ) \text{score}(u,v) score(u,v),那么就是计算两个节点嵌入的相似度 f θ ( u , v ) f_{\theta}(u,v) fθ(u,v):
L = − 1 ∣ E ∣ ∑ ( u , v ) ∈ E log ( σ ( f θ ( u , v ) ) ) − 1 ∣ E n e g ∣ ∑ ( u , v ) ∈ E n e g log ( 1 − σ ( f θ ( u , v ) ) ) \mathcal{L}=-\frac1{|E|}\sum_{(u,v)\in E}\log(\sigma(f_{\theta}(u,v)))-\frac{1}{|E_{\rm neg}|}\sum_{(u,v)\in E_{\rm neg}}\log(1-\sigma(f_{\theta}(u,v))) L=−∣E∣1(u,v)∈E∑log(σ(fθ(u,v)))−∣Eneg∣1(u,v)∈Eneg∑log(1−σ(fθ(u,v)))
注意这种损失函数(称为Binary Loss)是非个性化的(non-personalized),因为所有正边和负边都是对于所有用户生效的,但是评价指标Recall@K是个性化的(要根据每个用户的 P u P_u Pu来定)。因此提出贝叶斯个性化排行损失:
L ( u ∗ ) = 1 ∣ E ∣ ⋅ ∣ E n e g ∣ ∑ ( u ∗ , v p o s ) ∈ E ( u ∗ ) ∑ ( u ∗ , v n e g ) ∈ E n e g ( u ∗ ) − log ( σ ( f θ ( u ∗ , v p o s ) − f θ ( u ∗ , v n e g ) ) ) \mathcal{L}(u^*)=\frac{1}{|E|\cdot|E_{\rm neg}|}\sum_{(u^*,v_{\rm pos})\in E(u^*)}\sum_{(u^*,v_{\rm neg})\in E_{\rm neg}(u^*)}-\log(\sigma(f_{\theta}(u^*,v_{\rm pos})-f_\theta(u^*,v_{\rm neg}))) L(u∗)=∣E∣⋅∣Eneg∣1(u∗,vpos)∈E(u∗)∑(u∗,vneg)∈Eneg(u∗)∑−log(σ(fθ(u∗,vpos)−fθ(u∗,vneg)))
总的损失函数定义为:
L = 1 ∣ U ∣ ∑ u ∗ ∈ U L ( u ∗ ) \mathcal{L}=\frac1{|U|}\sum_{u^*\in U}\mathcal{L}(u^*) L=∣U∣1u∗∈U∑L(u∗) -
基于GNN的模型:
-
[Wang et al. 2019] Neural Graph Collaborative Filtering (NGCF)
协同过滤的神经版本,根据节点的嵌入来做的协同过滤。
-
[He et al. 2020] LightGCN
这个后面有一个章节(LightGCN概述)是讲这个网络的原理的,这里不赘述。不过这里的slide讲得好像更详细一些。其实本质上还是用的用户嵌入和商品嵌入计算得分函数。
LightGCN里聚合就是简单的等权平均。
-
PinSAGE [Ying et al. 2018]
这个是用于图像处理的GNN,是目前GCN最大的工业应用。
-
Louvain算法
Louvain算法是基于模块度的社区发现算法,该算法在效率和效果上都表现较好,并且能够发现层次性的社区结构,其优化目标是最大化整个社区网络的模块度。
GraphRNN
转载自https://zhuanlan.zhihu.com/p/272854914
图由若干个点和边构成,一个很自然的想法是,逐个生成这些点和边,也就是生成节点和连边的序列,这正是RNN擅长的事,所以有了GraphRNN模型。
下图是一个GraphRNN的示意图, S i π S_i^\pi Siπ表示序列每一步生成的元素,与传统RNN不同的是,GraphRNN每一步不仅要生成节点,还要生成这个节点与其他节点之间的连边,而要生成若干个连边,需要另一个序列生成模型,所以GraphRNN生成的序列S是一个Seq of Seq,即,序列的序列,这也正是GraphRNN复杂的地方。

下面来看一个GraphRNN的示例,第一个unit是序列的其实状态,第二个unit生成了1号节点,然后生成了下一个节点与1号节点的连边关系,值是1,因此第三个unit生成了节点2,并且节点2与节点1相连,然后生成下一个节点与节点1和2的连边,即图中的 S 3 π S_3^\pi S3π,节点3和节点1连接,与节点2不连接,由此到下一个unit,生成了节点3,剩余unit可以以此类推。这里,Node-level的RNN只负责生成Edge-level RNN的初始状态,Edge-level RNN负责生成连边关系。
课程中还提到,训练时采用Teacher Forcing方式,即,下一个unit的输入不来自上一个unit的输出,而是上一个unit的label,这就保证了GraphRNN一定可以生成一张一模一样的图,但是这种过拟合的方法在实践中是否管用,笔者持保留意见。
一些前沿研究
-
位置感知(position-aware)的GNN:
相对概念的结构感知的图,结构感知的图会将图中的等价节点标注为一类(可以看Graphlet的那个图里,只标注的同类节点,未标注的其他节点在结构上都有同等的对应),位置感知的图则有点类似聚类的标注,比如同属于一个三角形的三个顶点会标为一类,另一个三角形的三个节点标为另一类。
GNN总是会在位置感知的任务上失败,因为GNN对位置并不敏感。
因此需要引入一个锚定点(Anchor),随机选取即可,以相对于锚定点的距离来判定不同节点的位置。
类似有推广到锚定集合,即选一群点作为锚定。
基于此可以训练得到带有位置信息的节点嵌入和边嵌入。
-
身份感知(identity-aware)的GNN:
这个考虑的问题是,在一些情况下,输入不同的图,但是它们的计算图是完全相同的。
这个问题感觉偏理论计算机研究的领域,由此衍生出的概念是ID-GNN
看到这里越来越觉得GNN真的没有看起来那么简单,相比于神经网络,GNN有更多需要发掘的理论问题,根源就是图论的复杂性,很多图论问题都可以拉到GNN里来考虑。
-
GNN的鲁棒性(robustness):即对图做微扰,预测结果发生的变化。
LightGCN概述
[Wu et al. ICML 2019],从原先的GCN模型中去除了非线性激活层。
数学标记定义:
- 邻接矩阵 A A A,这里做了一个自循环处理,即 A ← A + I A\leftarrow A+I A←A+I,这个在GCN里也是这么处理的;
- 节点度数矩阵 D D D
- 正则化的邻接矩阵 A ~ = D − 1 / 2 A D − 1 / 2 \tilde A=D^{-1/2}AD^{-1/2} A~=D−1/2AD−1/2
- E ( k ) E^{(k)} E(k)表示第 k k k层的嵌入矩阵;
- E E E表示输入的嵌入矩阵;
- E ( k + 1 ) = ReLU ( A ~ E ( k ) W ( k ) ) E^{(k+1)}=\text{ReLU}(\tilde AE^{(k)}W^{(k)}) E(k+1)=ReLU(A~E(k)W(k)), W ( k ) W^{(k)} W(k)为可学习得到参数;