前言
看到一个很有意思的项目,其实在之前就在百度飞浆等平台上看到类似的实现效果。
可以将照片按照视频的表情,动起来。看一下项目给出的效果。
项目地址:first-order-model项目地址
还是老样子,不管作者给出的种种效果,自己测试一下。
资源下载和安装
我们先看一下README关于项目的基本信息,可以看出除了表情驱动照片,还可以姿态迁移。
模型文件提供了线上的下载地址。

文件很大而且难下,我下好了放到我的云盘上,可以从下面云盘下载。
链接 提取码:ikix
模型文件放到根目录下新建的checkpoint文件夹下。
将requirements.txt中的依赖安装一下。
安装补充
在测试README中的命令的时候,如果出现一下报错。
Traceback (most recent call last):
File "demo.py", line 17, in
from animate import normalize_kp
File "D:\spyder\first-order-model\animate.py", line 7, in
from frames_dataset import PairedDataset
File "D:\spyder\first-order-model\frames_dataset.py", line 10, in
from augmentation import AllAugmentationTransform
File "D:\spyder\first-order-model\augmentation.py", line 13, in
import torchvision
File "C:\Users\huyi\.conda\envs\fom\lib\site-packages\torchvision\__init__.py", line 2, in
from torchvision import datasets
File "C:\Users\huyi\.conda\envs\fom\lib\site-packages\torchvision\datasets\__init__.py", line 9, in
from .fakedata import FakeData
File "C:\Users\huyi\.conda\envs\fom\lib\site-packages\torchvision\datasets\fakedata.py", line 3, in
from .. import transforms
File "C:\Users\huyi\.conda\envs\fom\lib\site-packages\torchvision\transforms\__init__.py", line 1, in
from .transforms import *
File "C:\Users\huyi\.conda\envs\fom\lib\site-packages\torchvision\transforms\transforms.py", line 16, in
from . import functional as F
File "C:\Users\huyi\.conda\envs\fom\lib\site-packages\torchvision\transforms\functional.py", line 5, in
from PIL import Image, ImageOps, ImageEnhance, PILLOW_VERSION
ImportError: cannot import name 'PILLOW_VERSION' from 'PIL' (C:\Users\huyi\.conda\envs\fom\lib\site-packages\PIL\__init__.py)
这个问题主要是我使用的pillow版本过高的原因,如果不想找对应的低版本,可以按照我的方式解决。
1、修改functional.py代码,将PILLOW_VERSION调整为__version__。
2、将imageio升级。
pip install --upgrade imageio -i https://pypi.douban.com/simple
3、安装imageio_ffmpeg模块。
pip install imageio-ffmpeg -i https://pypi.douban.com/simple
工具代码验证
官方给出的使用方法我就不重复测试,大家可以按照下面的命令去测试一下。

这里我推荐一个可视化的库gradio,下面我将demo.py的代码改造了一下。
新的工具文件代码如下:
#!/user/bin/env python
# coding=utf-8
"""
@project : first-order-model
@author : 剑客阿良_ALiang
@file : hy_gradio.py
@ide : PyCharm
@time : 2022-06-23 14:35:28
"""
import uuid
from typing import Optional
import gradio as gr
import matplotlib
matplotlib.use('Agg')
import os, sys
import yaml
from argparse import ArgumentParser
from tqdm import tqdm
import imageio
import numpy as np
from skimage.transform import resize
from skimage import img_as_ubyte
import torch
from sync_batchnorm import DataParallelWithCallback
from modules.generator import OcclusionAwareGenerator
from modules.keypoint_detector import KPDetector
from animate import normalize_kp
from scipy.spatial import ConvexHull
if sys.version_info[0] < 3:
raise Exception("You must use Python 3 or higher. Recommended version is Python 3.7")
def load_checkpoints(config_path, checkpoint_path, cpu=False):
with open(config_path) as f:
config = yaml.load(f)
generator = OcclusionAwareGenerator(**config['model_params']['generator_params'],
**config['model_params']['common_params'])
if not cpu:
generator.cuda()
kp_detector = KPDetector(**config['model_params']['kp_detector_params'],
**config['model_params']['common_params'])
if not cpu:
kp_detector.cuda()
if cpu:
checkpoint = torch.load(checkpoint_path, map_location=torch.device('cpu'))
else:
checkpoint = torch.load(checkpoint_path)
generator.load_state_dict(checkpoint['generator'])
kp_detector.load_state_dict(checkpoint['kp_detector'])
if not cpu:
generator = DataParallelWithCallback(generator)
kp_detector = DataParallelWithCallback(kp_detector)
generator.eval()
kp_detector.eval()
return generator, kp_detector
def make_animation(source_image, driving_video, generator, kp_detector, relative=True, adapt_movement_scale=True,
cpu=False):
with torch.no_grad():
predictions = []
source = torch.tensor(source_image[np.newaxis].astype(np.float32)).permute(0, 3, 1, 2)
if not cpu:
source = source.cuda()
driving = torch.tensor(np.array(driving_video)[np.newaxis].astype(np.float32)).permute(0, 4, 1, 2, 3)
kp_source = kp_detector(source)
kp_driving_initial = kp_detector(driving[:, :, 0])
for frame_idx in tqdm(range(driving.shape[2])):
driving_frame = driving[:, :, frame_idx]
if not cpu:
driving_frame = driving_frame.cuda()
kp_driving = kp_detector(driving_frame)
kp_norm = normalize_kp(kp_source=kp_source, kp_driving=kp_driving,
kp_driving_initial=kp_driving_initial, use_relative_movement=relative,
use_relative_jacobian=relative, adapt_movement_scale=adapt_movement_scale)
out = generator(source, kp_source=kp_source, kp_driving=kp_norm)
predictions.append(np.transpose(out['prediction'].data.cpu().numpy(), [0, 2, 3, 1])[0])
return predictions
def find_best_frame(source, driving, cpu=False):
import face_alignment
def normalize_kp(kp):
kp = kp - kp.mean(axis=0, keepdims=True)
area = ConvexHull(kp[:, :2]).volume
area = np.sqrt(area)
kp[:, :2] = kp[:, :2] / area
return kp
fa = face_alignment.FaceAlignment(face_alignment.LandmarksType._2D, flip_input=True,
device='cpu' if cpu else 'cuda')
kp_source = fa.get_landmarks(255 * source)[0]
kp_source = normalize_kp(kp_source)
norm = float('inf')
frame_num = 0
for i, image in tqdm(enumerate(driving)):
kp_driving = fa.get_landmarks(255 * image)[0]
kp_driving = normalize_kp(kp_driving)
new_norm = (np.abs(kp_source - kp_driving) ** 2).sum()
if new_norm < norm:
norm = new_norm
frame_num = i
return frame_num
def h_interface(input_image: str):
parser = ArgumentParser()
opt = parser.parse_args()
opt.config = "./config/vox-256.yaml"
opt.checkpoint = "./checkpoint/vox-cpk.pth.tar"
opt.source_image = input_image
opt.driving_video = "./data/input/ts.mp4"
opt.result_video = "./data/result/{}.mp4".format(uuid.uuid1().hex)
opt.relative = True
opt.adapt_scale = True
opt.cpu = True
opt.find_best_frame = False
opt.best_frame = False
# source_image = imageio.imread(opt.source_image)
source_image = opt.source_image
reader = imageio.get_reader(opt.driving_video)
fps = reader.get_meta_data()['fps']
driving_video = []
try:
for im in reader:
driving_video.append(im)
except RuntimeError:
pass
reader.close()
source_image = resize(source_image, (256, 256))[..., :3]
driving_video = [resize(frame, (256, 256))[..., :3] for frame in driving_video]
generator, kp_detector = load_checkpoints(config_path=opt.config, checkpoint_path=opt.checkpoint, cpu=opt.cpu)
if opt.find_best_frame or opt.best_frame is not None:
i = opt.best_frame if opt.best_frame is not None else find_best_frame(source_image, driving_video, cpu=opt.cpu)
print("Best frame: " + str(i))
driving_forward = driving_video[i:]
driving_backward = driving_video[:(i + 1)][::-1]
predictions_forward = make_animation(source_image, driving_forward, generator, kp_detector,
relative=opt.relative, adapt_movement_scale=opt.adapt_scale, cpu=opt.cpu)
predictions_backward = make_animation(source_image, driving_backward, generator, kp_detector,
relative=opt.relative, adapt_movement_scale=opt.adapt_scale, cpu=opt.cpu)
predictions = predictions_backward[::-1] + predictions_forward[1:]
else:
predictions = make_animation(source_image, driving_video, generator, kp_detector, relative=opt.relative,
adapt_movement_scale=opt.adapt_scale, cpu=opt.cpu)
imageio.mimsave(opt.result_video, [img_as_ubyte(frame) for frame in predictions], fps=fps)
return opt.result_video
if __name__ == "__main__":
demo = gr.Interface(h_interface, inputs=[gr.Image(shape=(500, 500))], outputs=[gr.Video()])
demo.launch()
# h_interface("C:\\Users\\huyi\\Desktop\\xx3.jpg")
代码说明
1、将原demo.py中的main函数内容,重新编辑为h_interface方法,输入是想要驱动的图片。
2、其中driving_video参数使用了我自己录制的一段表情视频ts.mp4,我建议在使用的时候可以自己用手机录制一段替换。
3、使用gradio来生成方法的页面,下面会展示给大家看。
4、使用uuid为结果视频命名。
执行结果如下
Running on local URL: http://127.0.0.1:7860/
To create a public link, set `share=True` in `launch()`.
打开本地的地址:http://localhost:7860/
可以看到我们实现的交互界面如下:
我们上传一下我准备的样例图片,提交制作。

看一下执行的日志,如下图。

看一下制作结果。
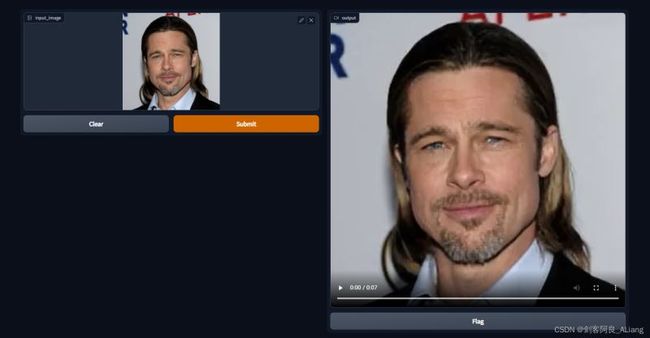
由于上传不了视频,我将视频转成了gif。
还是蛮有意思的,具体的参数调优我就不弄了,大家可能根据需要调整我提供的方法里面的参数。
以上就是Python first-order-model实现让照片动起来的详细内容,更多关于Python 照片动起来的资料请关注脚本之家其它相关文章!