园区自动驾驶实车平台决策规划控制系统(一)——基于纯追踪算法的横向控制(C++实现)
总结一下自己这一年的项目经验,由于本人技术水平有限,写作内容难免有错,如果发现还请不吝赐教~
在项目中本人负责的是自动驾驶的决策规划控制算法部分,在研发过程中负责对接上层感知定位模块和下层线控系统,项目实现了在园区场景下的自动驾驶。实现的场景包括单障碍物换道避障,多障碍物换道避障,跟车行驶,停车等待行人等。
接下来准备把项目中用到的横向控制、纵向控制、换道轨迹规划和决策模型分别记录,并附上核心代码,本文是第一篇。先放几个测试场景的视频作为预告。
园区自动驾驶(一)——基于Pure Pursuit的横向控制
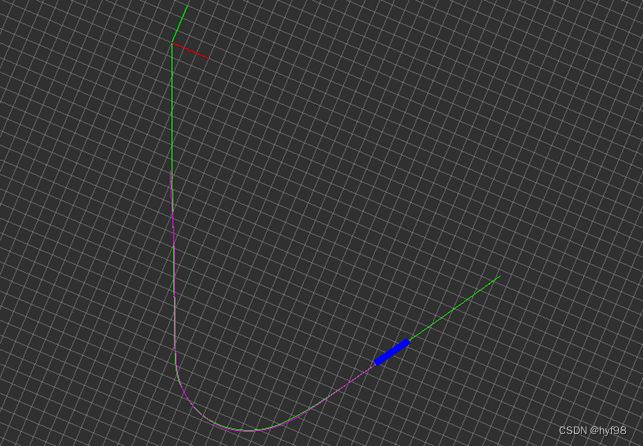
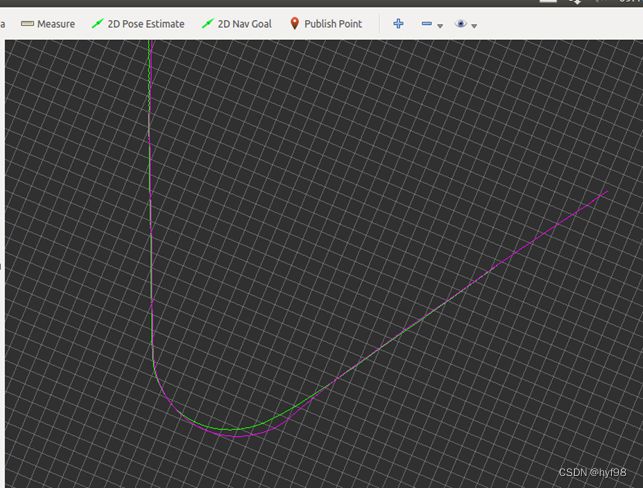
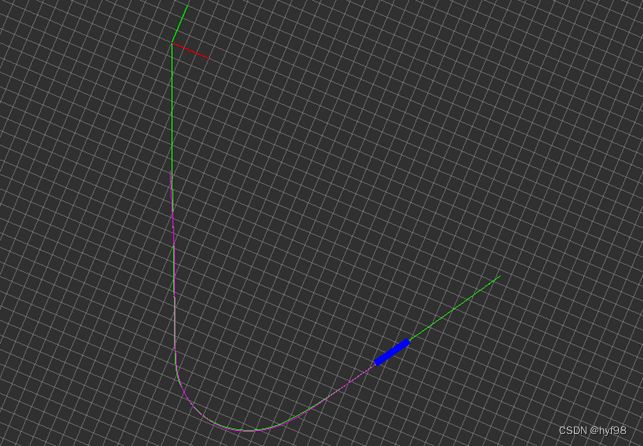
由于本文是针对园区的自动驾驶,车速较低,且循迹路径是一条固定的路线,测试路径如下图所示,图中:绿色路径是录制的离线路径,录制方法是手动开车时记录下组合惯导系统的实时定位,并保存;紫色的路径是实际行驶路径;蓝色长条不是车辆模型,长度也不是车身长度,蓝条后端是车辆当前位置(后轴),蓝条前端是纯追踪算法当前的目标点。
在讲纯追踪算法之前,先陈述下使用纯追踪算法对车辆运动学和动力学模型的简化。
车辆运动学和动力学模型简化
无人驾驶-控制-自行车模型_0->oo的博客-CSDN博客
二自由度车辆运动学模型和动力学模型这位大佬讲的很清楚,总结一下结论,简化包括:
-
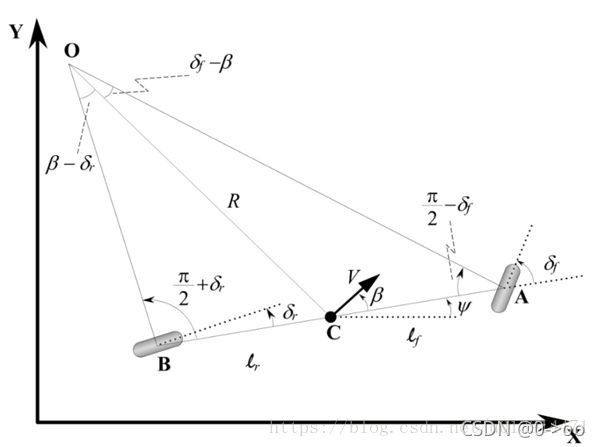
不考虑车辆在Z轴方向的运动,只考虑XY水平面的运动,如下图所示;
-
左右侧车轮转角一致,这样可将左右侧轮胎合并为一个轮胎,以便于搭建单车模型,如图2所示;
-
车辆行驶速度变化缓慢,忽略前后轴载荷的转移;
-
车身及悬架系统是刚性的;
-
简化结论有 :
1、一般条件下:![]() ,其中 航向角为yaw,横摆角为
,其中 航向角为yaw,横摆角为![]() ;
;
但低速条件下,认为车不会发生侧向滑动(漂移),因此质心侧偏角 β ≈ 0,可得: 航向角yaw=横摆角![]() 。
。
2、一般条件下,轮胎由于是胶体,会在压力下发生形变,导致轮胎侧偏;
但低速条件下,将轮胎视为完全刚体,不会发生变形,不考虑轮胎侧偏,且后轮一般不转向,因此后轮转角 ![]() 。
。
bicycle模型
在以上简化假设都成立的情况下,才能将四轮akerman转向模型简化为二轮bicycle模型。
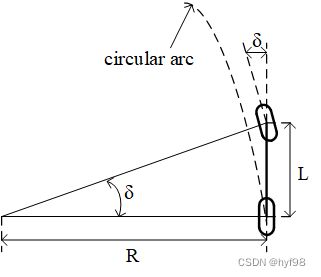
如上图所示,bicycle模型中,L是车的轴距,R是当前转向角下,车辆遵循的转弯半径,可以得到前轮转角δ 为:
![]()
纯追踪算法推导
接下来就是老生常谈的推导了,图懒得用visio画了,手画快些。
将四轮akerman模型简化成bicycle模型后,从录制的离线路径中选取下一个要追踪的目标点G(gx,gy),控制目标是让车辆的后轴中点S(组合惯导系统位于车辆后轴,因此定位得到的车辆当前位置其实是车辆后轴的位置)经过该目标点G。
目标点G,车辆位置S和转向圆圆心三个点构成了一个等腰三角形,根据正弦定理,可以推出以下三个公式:
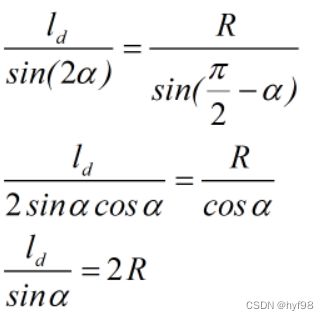
其中R为转向圆半径; ![]() 是希望控制车辆到达的下一个位置,即 look-ahead distance(前视距离):人类驾驶员开车时,眼睛看向道路前方的位置就是想开到的地方;纯追踪算法也一样,变成了在离线轨迹上寻找下一个期望到达的位置;夹角 α 为车身坐标系的x轴与车身坐标系原点与目标点的夹角,夹角 α 如下图所示。
是希望控制车辆到达的下一个位置,即 look-ahead distance(前视距离):人类驾驶员开车时,眼睛看向道路前方的位置就是想开到的地方;纯追踪算法也一样,变成了在离线轨迹上寻找下一个期望到达的位置;夹角 α 为车身坐标系的x轴与车身坐标系原点与目标点的夹角,夹角 α 如下图所示。
1/R也就是这段圆弧的曲率,为:
将1/R带入到bicycle模型的前轮转角公式![]() 中,可得:
中,可得:
将转角 δ 视作时间 t 的函数,可得:
上式就是纯跟踪算法的输出表达式,输出量为车辆前轮转角 δ 。
为了更好的理解影响纯跟踪算法精度的因素,定义车辆当前位姿 S 和目标点 G 的横向误差 ![]() ,可得夹角 α 正弦:
,可得夹角 α 正弦:
转角 δ 可以重写为:
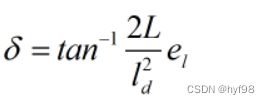
由于轴距 L 是常数,横向误差 ![]() 是自变量,因此因变量 δ 的控制效果主要取决于前视距离
是自变量,因此因变量 δ 的控制效果主要取决于前视距离 ![]() 。
。
通常来说,![]() 被认为是车速的函数,需要根据车速传感器反馈的当前车速来实时更新当前的前视距离。
被认为是车速的函数,需要根据车速传感器反馈的当前车速来实时更新当前的前视距离。
除了车速外,道路曲率也是影响循迹精度的关键。在弯道下,前视距离如果太大,可能导致循迹精度下降。
因此,本文将前视距离![]() 视作是车速和道路曲率的一次函数,即
视作是车速和道路曲率的一次函数,即 ![]() ,那么前轮的转角公式就变为:
,那么前轮的转角公式就变为:

其中,![]() 为最小前视距离,本文的最小前视距离大小根据道路曲率设置:如果道路曲率太大,则减小
为最小前视距离,本文的最小前视距离大小根据道路曲率设置:如果道路曲率太大,则减小 ![]() ,使追踪更加精确;如果道路曲率较小,则增大
,使追踪更加精确;如果道路曲率较小,则增大 ![]() ,使轨迹追踪更平滑。
,使轨迹追踪更平滑。
基于C++的纯追踪算法实车实现核心代码
本实现方法在ros环境下实现,纯追踪算法只用来控制转向角度,速度控制将在下一篇纵向控制中介绍。
首先根据实车型号定义各项参数。
#define K (1.5) // 前视距离系数
#define L_VEHICLE (2.9) // 车的轴距
int L0 = 1; //最小前视距离,根据道路曲率变化 本文将最小前视距离设为1 m,前视距离系数设为1.5 ,AionLX 车的轴距为2.9m。
定义车辆状态类,在bicycle模型中,位姿只考虑车辆当前世界坐标系下坐标(x,y),车辆偏航角yaw,以及车辆的速度speed:
struct State{
double x = 0; // m
double y = 0; // m
double yaw = 0; // degree
double speed = 0; // m/s
};
State vehicleState;订阅话题,接受定位和传感器节点发布的消息,更新车辆状态:
vehicle_location = node.subscribe("/geometry_pose", 2, &pure_pursuit::location_update, (pure_pursuit *) this);
veh_speed = node.subscribe("/vehicle_response", 2, &pure_pursuit::vehReportCallback, (pure_pursuit *) this);接收定位传来的当前位姿,包括世界坐标系坐标和四元数,用ros的tf::Quaternion库将四元数转为 roll,pitch 和 yaw,得到航向角yaw:
//用PoseStamped更新位姿(x,y,yaw)
void pure_pursuit::location_update(const geometry_msgs::PoseStamped::ConstPtr locat) {
vehicleState.x = locat->pose.position.x;
vehicleState.y = locat->pose.position.y;
//根据当前位置更新最小前视距离L0,其中boundary是直道和弯道的分界点
if(vehicleState.x>boundary.x&&vehicleState.y>boundary.y){
L0=1; //最小前视距离默认为2,弯道上变为1
}
//用vehLocUpdatRdy表示位姿是否更新,默认为false
vehLocUpdatRdy = true;
tf::Quaternion quat(locat->pose.orientation.x, locat->pose.orientation.y, locat->pose.orientation.z, locat->pose.orientation.w);
// 用tf::Quaternion库将四元数转为 roll pitch 和 yaw
double roll, pitch, yaw;
tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
vehicleState.yaw = yaw;
}接受传感器传来的当前车速,更新当前车速:
//用传感器回调函数更新当前车速
void pure_pursuit::vehReportCallback(const common_msgs::veh_response::ConstPtr &veh_report_msg)
{
vehicleState.speed = static_cast(veh_report_msg->veh_spd);
} 纯追踪横向控制核心代码:
//根据目标进行转角控制
double pure_pursuit::pure_pursuit_control(const State &s, const vector &path, int *lastIndex) {
int index = get_goal_index(s, path); // 搜索目标点,返回目标点的标签
// 用上一个循环的目标点判断是否是在向前走
if (index <= *lastIndex) {
index = *lastIndex;
}
Point goal;
//防止index溢出
if (index < path.size()) {
goal = path[index];
} else {
index = path.size() - 1;
goal = path[index];
}
// 车身坐标系的x轴和目标点与车身坐标系原点连线的夹角
double alpha = atan2(goal.y - s.y, goal.x - s.x) - s.yaw;
if (s.speed < 0)
alpha = M_PI - alpha;
double lf = K * s.speed + L0; // 根据车速和道路曲率设置前视距离
// delta 即为纯跟踪算法的最终输出
double delta = atan2((2.0 * L_VEHICLE * sin(alpha)) / lf, 1.0);
*lastIndex = index; // 为下一个循环更新上一个目标点
return delta;
} 定义函数用于搜索最近的目标点:
//index为跟踪目标
int pure_pursuit::get_goal_index(const State &s, const vector &path) {
vector d;
for (int i = 0; i < path.size(); i++)
d.push_back(pow((s.x - path[i].x), 2) + pow((s.y - path[i].y), 2));//距离计算
int index = 0;
double d_min = d[0];
int dVecLen = d.size();
//找到距离车辆最近的路径点
for (int i = 0; i < dVecLen; i++) {
if (d_min > d[i]) {
d_min = d[i];
index = i;
}
}
double l = 0;
double lf = K * s.speed + L0;
double dx_, dy_;
//积分法计算路径长度
while (l < lf && index < path.size()) {
dx_ = path[index + 1].x - path[index].x;
dy_ = path[index + 1].y - path[index].y;
l += sqrt(dx_ * dx_ + dy_ * dy_);
index++;
}
return index;
} 发送转角给线控系统执行:
bool pure_pursuit::track_follow_process(const vector &pathVet) {
bool isjobDone = false;
//判断路径是否走完
if (goalIndex < rearIndex) {
//获取纯跟踪输出的前轮转角
delta = pure_pursuit_control(vehicleState, pathVet, &goalIndex);
wheelAngle = delta * 180 / M_PI;
wheelAngle = -1 * wheelAngle; //前轮转角为弧度制,逆时针为正,AionLX车的顺时针转向为正,逆时针为负,刚好相反
//AionLX前轮转角最大为40°
if (wheelAngle > 40.0) wheelAngle = 40.0;
if (wheelAngle < -40.0) wheelAngle = -40.0;
}
//如果走完,则急停
if (goalIndex >= rearIndex)
isjobDone = true;
//发布前轮转角
std_msgs::Float32 tempAngleSet;
tempAngleSet.data = wheelAngle;
strAngle_pub.publish(tempAngleSet);
return isjobDone;
} 以上就是纯追踪算法的核心代码,经实车实验,平均误差小于10cm。如下左图,由于设置的最大前轮转角不够大,且前视距离设置较大,所以在急剧转角处出现了转向不足的情况;将最大前轮转角改为40°,前视距离改小后,如下右图,在大弯道也能准确循迹。
小结
纯追踪算法是一种几何路径跟踪算法,很适合新手上手使用。优点是很大地简化了车辆运动学和动力学模型,输入输出明确,在低速下能获得较好地控制效果;缺点是简化了太多的车辆运动学和动力学模型,所以只要速度和加速度提高,运动学动力学简化条件不再成立,就无法保证横向控制精度。
本项目由于是在园区内行驶,车速不会高于10km/h,所以纯追踪算法能够达到横向控制需求。但目前选择最佳前视距离的方法并不一定,本文将 ![]() 视作纵向速度和路径曲率相关的一次函数,大的前视距离可以使控制更平滑,但在大转角处会转向不足;前视距离太小又会带来控制的震荡(前轮转角变动幅度很大)。 因此,影响横向控制精度地前视距离
视作纵向速度和路径曲率相关的一次函数,大的前视距离可以使控制更平滑,但在大转角处会转向不足;前视距离太小又会带来控制的震荡(前轮转角变动幅度很大)。 因此,影响横向控制精度地前视距离 ![]() 的选取仍有待优化。
的选取仍有待优化。
参考博客
无人驾驶汽车系统入门(十八)——使用pure pursuit实现无人车轨迹追踪_AdamShan的博客-CSDN博客自动驾驶(七十一)---------Pure Pursuit轨迹追踪_一实相印的博客-CSDN博客_自动驾驶轨迹跟踪
无人驾驶-控制-阿克曼模型_0->oo的博客-CSDN博客_阿克曼模型