epoll原理详解及epoll反应堆模型
epoll原理详解及epoll反应堆模型
- 一、epoll原理详解
- 二、epoll的两种触发模式
- 三、epoll反应堆模型
- Linux下的socket编程实践(九) epoll实现高并发的原理及其使用
-
- Epoll相对select/poll的优势
- epoll的使用
- epoll IO多路复用模型实现机制
- epoll多路复用和Reactor设计思想
原文链接:https://blog.csdn.net/daaikuaichuan/article/details/83862311
设想一个场景:有100万用户同时与一个进程保持着TCP连接,而每一时刻只有几十个或几百个TCP连接是活跃的(接收TCP包),也就是说在每一时刻进程只需要处理这100万连接中的一小部分连接。那么,如何才能高效的处理这种场景呢?进程是否在每次询问操作系统收集有事件发生的TCP连接时,把这100万个连接告诉操作系统,然后由操作系统找出其中有事件发生的几百个连接呢?实际上,在Linux2.4版本以前,那时的select或者poll事件驱动方式是这样做的。
这里有个非常明显的问题,即在某一时刻,进程收集有事件的连接时,其实这100万连接中的大部分都是没有事件发生的。因此如果每次收集事件时,都把100万连接的套接字传给操作系统(这首先是用户态内存到内核态内存的大量复制),而由操作系统内核寻找这些连接上有没有未处理的事件,将会是巨大的资源浪费,然后select和poll就是这样做的,因此它们最多只能处理几千个并发连接。而epoll不这样做,它在Linux内核中申请了一个简易的文件系统,把原先的一个select或poll调用分成了3部分:
int epoll_create(int size);
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
int epoll_wait(int epfd, struct epoll_event *events,int maxevents, int timeout);
-
调用epoll_create建立一个epoll对象(在epoll文件系统中给这个句柄分配资源);
-
调用epoll_ctl向epoll对象中添加这100万个连接的套接字;
-
调用epoll_wait收集发生事件的连接。
这样只需要在进程启动时建立1个epoll对象,并在需要的时候向它添加或删除连接就可以了,因此,在实际收集事件时,epoll_wait的效率就会非常高,因为调用epoll_wait时并没有向它传递这100万个连接,内核也不需要去遍历全部的连接。
一、epoll原理详解
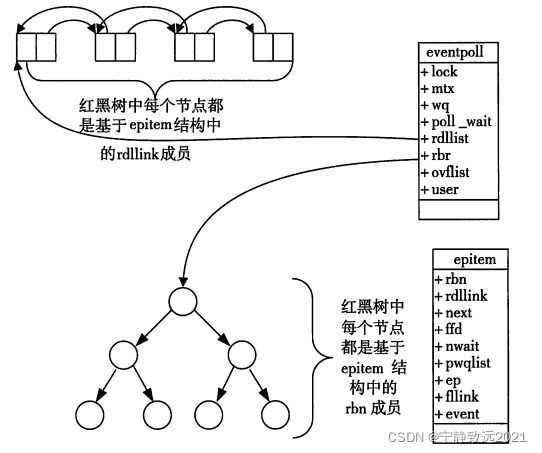
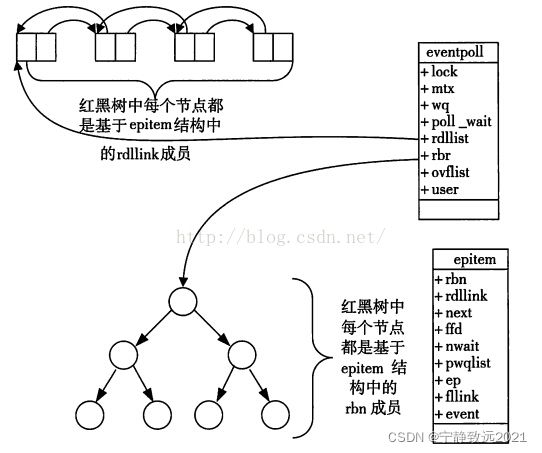
当某一进程调用epoll_create方法时,Linux内核会创建一个eventpoll结构体,这个结构体中有两个成员与epoll的使用方式密切相关,如下所示:
struct eventpoll {
...
/*红黑树的根节点,这棵树中存储着所有添加到epoll中的事件,
也就是这个epoll监控的事件*/
struct rb_root rbr;
/*双向链表rdllist保存着将要通过epoll_wait返回给用户的、满足条件的事件*/
struct list_head rdllist;
...
};
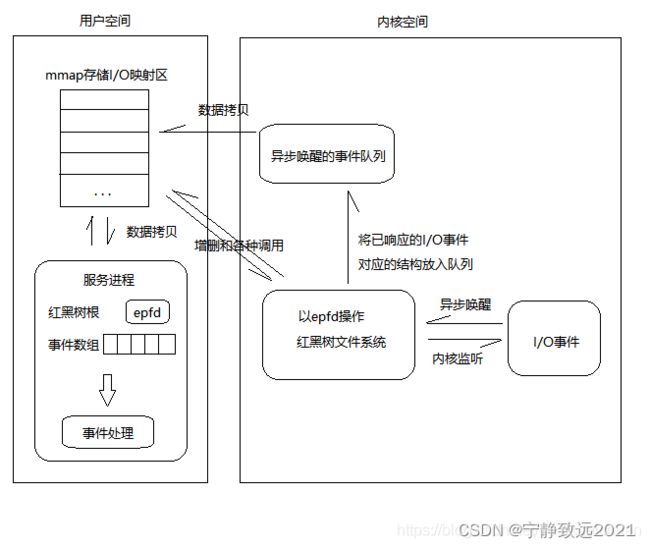
我们在调用epoll_create时,内核除了帮我们在epoll文件系统里建了个file结点,在内核cache里建了个红黑树用于存储以后epoll_ctl传来的socket外,还会再建立一个rdllist双向链表,用于存储准备就绪的事件,当epoll_wait调用时,仅仅观察这个rdllist双向链表里有没有数据即可。有数据就返回,没有数据就sleep,等到timeout时间到后即使链表没数据也返回。所以,epoll_wait非常高效。
所有添加到epoll中的事件都会与设备(如网卡)驱动程序建立回调关系,也就是说相应事件的发生时会调用这里的回调方法。这个回调方法在内核中叫做ep_poll_callback,它会把这样的事件放到上面的rdllist双向链表中。
在epoll中对于每一个事件都会建立一个epitem结构体,如下所示:
struct epitem {
...
//红黑树节点
struct rb_node rbn;
//双向链表节点
struct list_head rdllink;
//事件句柄等信息
struct epoll_filefd ffd;
//指向其所属的eventepoll对象
struct eventpoll *ep;
//期待的事件类型
struct epoll_event event;
...
}; // 这里包含每一个事件对应着的信息。
当调用epoll_wait检查是否有发生事件的连接时,只是检查eventpoll对象中的rdllist双向链表是否有epitem元素而已,如果rdllist链表不为空,则这里的事件复制到用户态内存(使用共享内存提高效率)中,同时将事件数量返回给用户。因此epoll_waitx效率非常高。epoll_ctl在向epoll对象中添加、修改、删除事件时,从rbr红黑树中查找事件也非常快,也就是说epoll是非常高效的,它可以轻易地处理百万级别的并发连接。
【总结】:
一颗红黑树,一张准备就绪句柄链表,少量的内核cache,就帮我们解决了大并发下的socket处理问题。
执行epoll_create()时,创建了红黑树和就绪链表;
执行epoll_ctl()时,如果增加socket句柄,则检查在红黑树中是否存在,存在立即返回,不存在则添加到树干上,然后向内核注册回调函数,用于当中断事件来临时向准备就绪链表中插入数据;
执行epoll_wait()时立刻返回准备就绪链表里的数据即可。
二、epoll的两种触发模式
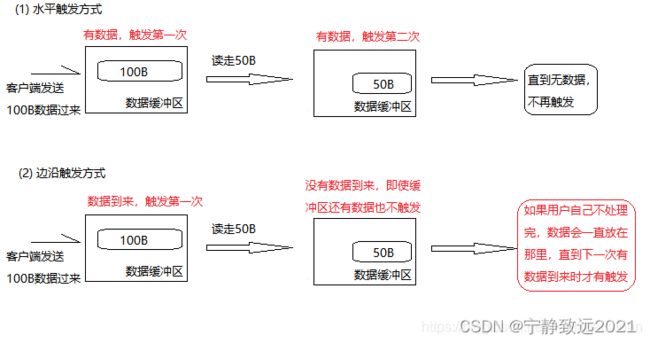
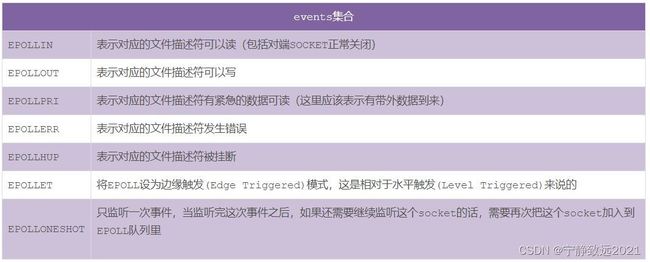
epoll有EPOLLLT和EPOLLET两种触发模式,LT是默认的模式,ET是“高速”模式。
LT(水平触发)模式下,只要这个文件描述符还有数据可读,每次 epoll_wait都会返回它的事件,提醒用户程序去操作;
ET(边缘触发)模式下,在它检测到有 I/O 事件时,通过 epoll_wait 调用会得到有事件通知的文件描述符,对于每一个被通知的文件描述符,如可读,则必须将该文件描述符一直读到空,让 errno 返回 EAGAIN 为止,否则下次的 epoll_wait 不会返回余下的数据,会丢掉事件。如果ET模式不是非阻塞的,那这个一直读或一直写势必会在最后一次阻塞。
还有一个特点是,epoll使用“事件”的就绪通知方式,通过epoll_ctl注册fd,一旦该fd就绪,内核就会采用类似callback的回调机制来激活该fd,epoll_wait便可以收到通知。
【epoll为什么要有EPOLLET触发模式?】:
如果采用EPOLLLT模式的话,系统中一旦有大量你不需要读写的就绪文件描述符,它们每次调用epoll_wait都会返回,这样会大大降低处理程序检索自己关心的就绪文件描述符的效率.。而采用EPOLLET这种边缘触发模式的话,当被监控的文件描述符上有可读写事件发生时,epoll_wait()会通知处理程序去读写。如果这次没有把数据全部读写完(如读写缓冲区太小),那么下次调用epoll_wait()时,它不会通知你,也就是它只会通知你一次,直到该文件描述符上出现第二次可读写事件才会通知你!!!这种模式比水平触发效率高,系统不会充斥大量你不关心的就绪文件描述符。
【总结】:
ET模式(边缘触发)只有数据到来才触发,不管缓存区中是否还有数据,缓冲区剩余未读尽的数据不会导致epoll_wait返回;
LT 模式(水平触发,默认)只要有数据都会触发,缓冲区剩余未读尽的数据会导致epoll_wait返回。
三、epoll反应堆模型
【epoll模型原来的流程】:
epoll_create(); // 创建监听红黑树
epoll_ctl(); // 向书上添加监听fd
epoll_wait(); // 监听
有监听fd事件发送--->返回监听满足数组--->判断返回数组元素--->
lfd满足accept--->返回cfd---->read()读数据--->write()给客户端回应。
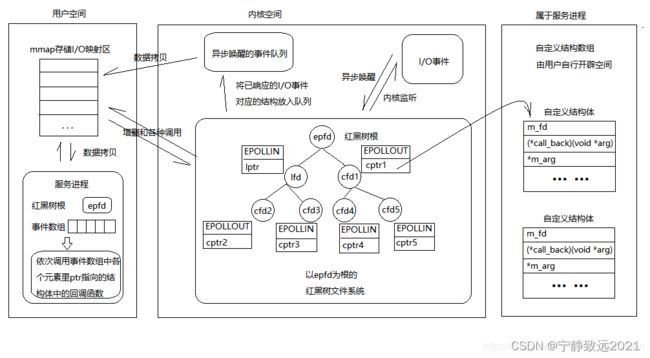
【epoll反应堆模型的流程】:
epoll_create(); // 创建监听红黑树
epoll_ctl(); // 向书上添加监听fd
epoll_wait(); // 监听
有客户端连接上来--->lfd调用acceptconn()--->将cfd挂载到红黑树上监听其读事件--->
epoll_wait()返回cfd--->cfd回调recvdata()--->将cfd摘下来监听写事件--->
epoll_wait()返回cfd--->cfd回调senddata()--->将cfd摘下来监听读事件--->...--->
【Demo】:
#include Linux下的socket编程实践(九) epoll实现高并发的原理及其使用
原文链接:https://blog.csdn.net/NK_test/article/details/49331717
在 linux 没有实现 epoll 事件驱动机制之前,我们一般选择用 selec t或者 poll 等IO多路复用的方法来实现并发服务程序(详见此链接)。在大数据、高并发、集群等一些名词唱得火热之年代,select 和 poll的用武之地越来越有限,风头已经被 epoll 占尽。
本文便来介绍 epoll 的实现机制,并通过对比其不同的实现机制,真正理解为何 epoll 能实现高并发。
Epoll相对select/poll的优势
-
Epoll 没有最大并发连接的限制,上限是最大可以打开文件的数目,这个数字一般远大于 2048, 一般来说这个数目和系统内存关系很大 ,具体数目可以 cat /proc/sys/fs/file-max[599534] ,并且现在服务器的内存都很大,所以这个不是问题。
-
效率提升,epoll对于句柄事件的选择不是遍历的,是事件响应的,就是句柄上事件来就马上选择出来,不需要遍历整个句柄链表,因此效率非常高,内核将句柄用红黑树保存的,IO效率不随FD数目增加而线性下降。
-
内存拷贝, select让内核把 FD 消息通知给用户空间的时候使用了内存拷贝的方式,开销较大,但是Epoll 在这点上使用了共享内存的方式,这个内存拷贝也省略了。
epoll的使用
int epoll_create(int size);
int epoll_create1(int flags);
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
int epoll_wait(int epfd, struct epoll_event *events, int maxevents, int timeout);
-
对于epoll_create1 的flag参数: 可以设置为0 或EPOLL_CLOEXEC,为0时函数表现与epoll_create一致, EPOLL_CLOEXEC标志与open 时的O_CLOEXEC 标志类似,即进程被替换时会关闭打开的文件描述符(需要注意的是,epoll_create与epoll_create1当创建好epoll句柄后,它就是会占用一个fd值,在linux下如果查看/proc//fd/,是能够看到这个fd的,所以在使用完epoll后,必须调用close()关闭,否则可能导致fd被耗尽)。
-
对于epoll_ctl, op参数表示动作,用三个宏来表示:

3. 对于epoll_wait:
events:结构体指针, 一般是一个数组
maxevents:事件的最大个数, 或者说是数组的大小
timeout:超时时间, 含义与poll的timeout参数相同,设为-1表示永不超时;
- epoll_event结构体
struct epoll_event
{
uint32_t events; /* Epoll events */
epoll_data_t data; /* User data variable */
};
typedef union epoll_data
{
void *ptr;
int fd;
uint32_t u32;
uint64_t u64;
} epoll_data_t;
一般data 共同体我们设置其成员fd即可,也就是epoll_ctl 函数的第三个参数。
epoll IO多路复用模型实现机制
设想一下如下场景:有100万个客户端同时与一个服务器进程保持着TCP连接。而每一时刻,通常只有几百上千个TCP连接是活跃的(事实上大部分场景都是这种情况)。如何实现这样的高并发?
在select/poll时代,服务器进程每次都把这100万个连接告诉操作系统(从用户态复制句柄数据结构到内核态),让操作系统内核去查询这些套接字上是否有事件发生,轮询完后,再将句柄数据复制到用户态,让服务器应用程序轮询处理已发生的网络事件,这一过程资源消耗较大,因此,select/poll一般只能处理几千的并发连接。
epoll的设计和实现与select完全不同。epoll通过在Linux内核中申请一个简易的文件系统,把原先的select/poll调用分成了3个部分:
1)调用epoll_create()建立一个epoll对象(在epoll文件系统中为这个句柄对象分配资源)
2)调用epoll_ctl向epoll对象中添加这100万个连接的套接字
3)调用epoll_wait收集发生的事件的连接
如此一来,要实现上面说的场景,只需要在进程启动时建立一个epoll对象,然后在需要的时候向这个epoll对象中添加或者删除连接。同时,epoll_wait的效率也非常高,因为调用epoll_wait时,并没有一股脑的向操作系统复制这100万个连接的句柄数据,内核也不需要去遍历全部的连接。
下面来看看Linux内核具体的epoll机制实现思路。
当某一进程调用epoll_create方法时,Linux内核会创建一个eventpoll结构体,这个结构体中有两个成员与epoll的使用方式密切相关。eventpoll结构体如下所示:
struct eventpoll{
....
/*红黑树的根节点,这颗树中存储着所有添加到epoll中的需要监控的事件*/
struct rb_root rbr;
/*双链表中则存放着将要通过epoll_wait返回给用户的满足条件的事件*/
struct list_head rdlist;
....
};
每一个epoll对象都有一个独立的eventpoll结构体,用于存放通过epoll_ctl方法向epoll对象中添加进来的事件。这些事件都会挂载在红黑树中,如此,重复添加的事件就可以通过红黑树而高效的识别出来(红黑树的插入时间效率是lgn,其中n为树的高度)。
而所有添加到epoll中的事件都会与设备(网卡)驱动程序建立回调关系,也就是说,当相应的事件发生时会调用这个回调方法。这个回调方法在内核中叫ep_poll_callback,它会将发生的事件添加到rdlist双链表中。
在epoll中,对于每一个事件,都会建立一个epitem结构体,如下所示:
struct epitem{
struct rb_node rbn;//红黑树节点
struct list_head rdllink;//双向链表节点
struct epoll_filefd ffd; //事件句柄信息
struct eventpoll *ep; //指向其所属的eventpoll对象
struct epoll_event event; //期待发生的事件类型
}
当调用epoll_wait检查是否有事件发生时,只需要检查eventpoll对象中的rdlist双链表中是否有epitem元素即可。如果rdlist不为空,则把发生的事件复制到用户态,同时将事件数量返回给用户。
从上面的讲解可知:通过红黑树和双链表数据结构,并结合回调机制,造就了epoll的高效。
OK,讲解完了Epoll的机理,我们便能很容易掌握epoll的用法了。一句话描述就是:三步曲。
第一步:epoll_create()系统调用。此调用返回一个句柄,之后所有的使用都依靠这个句柄来标识。
第二步:epoll_ctl()系统调用。通过此调用向epoll对象中添加、删除、修改感兴趣的事件,返回0标识成功,返回-1表示失败。
第三部:epoll_wait()系统调用。通过此调用收集收集在epoll监控中已经发生的事件。
下面提供一个epoll的使用框架:
for( ; ; )
{
nfds = epoll_wait(epfd,events,20,500);
for(i=0;i<nfds;++i)
{
if(events[i].data.fd==listenfd) //如果是主socket的事件,则表示有新的连接
{
connfd = accept(listenfd,(sockaddr *)&clientaddr, &clilen); //accept这个连接
ev.data.fd=connfd;
ev.events=EPOLLIN|EPOLLET;
epoll_ctl(epfd,EPOLL_CTL_ADD,connfd,&ev); //将新的fd添加到epoll的监听队列中
}
else if( events[i].events&EPOLLIN ) //接收到数据,读socket
{
if ( (sockfd = events[i].data.fd) < 0) continue;
n = read(sockfd, line, MAXLINE)) < 0 //读
ev.data.ptr = md; //md为自定义类型,添加数据
ev.events=EPOLLOUT|EPOLLET;
epoll_ctl(epfd,EPOLL_CTL_MOD,sockfd,&ev);//修改标识符,等待下一个循环时发送数据,异步处理的精髓
}
else if(events[i].events&EPOLLOUT) //有数据待发送,写socket
{
struct myepoll_data* md = (myepoll_data*)events[i].data.ptr; //取数据
sockfd = md->fd;
send( sockfd, md->ptr, strlen((char*)md->ptr), 0 ); //发送数据
ev.data.fd=sockfd;
ev.events=EPOLLIN|EPOLLET;
epoll_ctl(epfd,EPOLL_CTL_MOD,sockfd,&ev); //修改标识符,等待下一个循环时接收数据
}
else
{
//其他情况的处理
}
}
}
首先,通过epoll_create(int maxfds)来创建一个epoll的句柄,其中maxfds为你epoll所支持的最大句柄数。这个函数会返回一个新的epoll句柄,之后的所有操作将通过这个句柄来进行操作。在用完之后,记得用close()来关闭这个创建出来的epoll句柄。
然后,在你的网络主循环里面,每一帧的调用epoll_wait(int epfd, epoll_event* events, int max events, int timeout)来查询所有的网络接口,看哪一个可以读,哪一个可以写了。基本的语法为:nfds = epoll_wait(kdpfd, events, maxevents, -1);
其中kdpfd为用epoll_create创建之后的句柄,events是一个epoll_event*的指针,当epoll_wait这个函数操作成功之后, events里面将储存所有的读写事件。max_events是当前需要监听的所有socket句柄数。最后一个timeout是 epoll_wait的超时,为0的时候表示马上返回,为-1的时候表示一直等下去,直到有事件范围,为任意正整数的时候表示等这么长的时间,如果一直没有事件,则返回。一般如果网络主循环是单独的线程的话,可以用-1来等,这样可以保证一些效率,如果是和主逻辑在同一个线程的话,则可以用0来保证主循环的效率。
接下来,epoll_wait范围之后应该是一个循环,遍历所有的事件。
ET/LT模式
1、EPOLLLT:完全靠Linux-kernel-epoll驱动,应用程序只需要处理从epoll_wait返回的fds, 这些fds我们认为它们处于就绪状态。此时epoll可以认为是更快速的poll。
2、EPOLLET:此模式下,系统仅仅通知应用程序哪些fds变成了就绪状态,一旦fd变成就绪状态,epoll将不再关注这个fd的任何状态信息(从epoll队列移除), 直到应用程序通过读写操作(非阻塞)触发EAGAIN状态,epoll认为这个fd又变为空闲状态,那么epoll又重新关注这个fd的状态变化(重新加入epoll队列)。 随着epoll_wait的返回,队列中的fds是在减少的,所以在大并发的系统中,EPOLLET更有优势,但是对程序员的要求也更高,因为有可能会出现数据读取不完整的问题,举例如下:
假设现在对方发送了2k的数据,而我们先读取了1k,然后这时调用了epoll_wait,如果是边沿触发ET,那么这个fd变成就绪状态就会从epoll 队列移除,则epoll_wait 会一直阻塞,忽略尚未读取的1k数据; 而如果是水平触发LT,那么epoll_wait 还会检测到可读事件而返回,我们可以继续读取剩下的1k 数据。
因此总结来说: LT模式可能触发的次数更多, 一旦触发的次数多, 也就意味着效率会下降; 但这样也不能就说LT模式就比ET模式效率更低, 因为ET的使用对编程人员提出了更高更精细的要求,一旦使用者编程水平不够, 那ET模式还不如LT模式;
最后附上一篇很优秀的文章: Apache和Nginx网络模型 来加深理解。
参考博客:
http://www.open-open.com/lib/view/open1410403215664.html
http://www.cnblogs.com/panfeng412/articles/2229095.html
epoll多路复用和Reactor设计思想
https://blog.csdn.net/Linuxhus/article/details/117092275?spm=1001.2101.3001.6650.14&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-14.pc_relevant_paycolumn_v3&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-14.pc_relevant_paycolumn_v3&utm_relevant_index=20
参考
https://blog.csdn.net/qq_36359022/article/details/81355897
https://blog.csdn.net/weixin_40204595/article/details/83213332
http://www.cnblogs.com/pluser/p/epoll_principles.html
https://www.cnblogs.com/aspirant/p/9166944.html