人工智能学习之机器人路径规划优化
人工智能学习之基于A*算法的机器人路径规划优化
前言
大三下学期,学习了人工智能,因为要备研,上课基本上没怎么听,故也就没怎么学,这是一门考查课,最后要完成布置的大作业,作为算分的依据,就选一个简单的完成吧。主要是A*算法的模拟。
本文原创,创作不易,转载请注明!!!
源码下载:
链接:https://pan.baidu.com/s/1HjCfUqT3yaRiBP2fBXAjWQ?pwd=Lin2
提取码:Lin2
白嫖虽好,学到东西才是真!
Qt入门系列:
Qt学习之C++基础
Qt学习之Qt安装
Qt学习之Qt基础入门(上)
Qt学习之Qt基础入门(中)
Qt学习之Qt基础入门(下)
题目
题目分析
机器人路径规划优化。
问题描述:机器人路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物的工作环境中,如何找到一条从起点到终点适当的运动路径,使机器人在运动过程中能安全、无碰撞地绕过所有障碍物。设机器人对环境已经,并且以进行了网格化处理 ,设1表示该网格为障碍物,0表示该网格无障碍物,机器人只可以前后左右四个方向移动,环境中包含一个起点和终点,请设计一个算法实现机器人从起点到终点的路径规划,路径越短约好。

要实现的选题如上,因为人工智能基本上没怎么听,就选择一个比较简单的题目实现模拟,主要是涉及到GUI图形界面和A*算法,故选择编程语言为C++,做一些简单的算法模拟比较简单,然后GUI选择Qt,有关Qt的学习可见我的如下博客:
Qt入门系列:
Qt学习之C++基础
Qt学习之Qt安装
Qt学习之Qt基础入门(上)
Qt学习之Qt基础入门(中)
Qt学习之Qt基础入门(下)
结果演示
首先选择一个方块,设置起点,然后再选择一个方块,设置终点,然后设置0个等若干个障碍物,就可以点击开始寻路了。
设置起点:选择一个方块设置为起点,默认为蓝色。
设置终点:选择一个方块设置为终点,默认为红色。
设置障碍:选择若干个方块设置为障碍物,可多选也可不选,默认为灰色。
清除还原:清空所有界面上的方块状态,将方块还原为初始态。
设置毫秒:设置每一步寻路的时延,默认为50ms。
开始寻路:设置好起点与终点之后即可开始寻路。
所有快捷键可用,同时按钮上存在功能提示!
A*算法
接下来对A*算法进行简单的说明。
简介
A*算法,被广泛应用于游戏中的自动寻路功能,A*算法是一种结合了前面两种算法优点的算法,在A*算法中,我们对节点按以下的方式进行排序:F = G + H,其中,G为从初始状态到当前状态所花费的代价;H为从当前状态到最终状态可能要付出的代价,H的值的计算由程序员来估算,同时H的估计算法越准确,算法所需要遍历的节点就越少;F为两者的和。A*算法是一种有序搜索算法,其特点在于对估价函数的定义上。对于一般的有序搜索,总是选择F值最小的节点作为扩展节点。因此,F是根据需要找到一条最小代价路径的观点来估算节点的。可考虑每个节点n的估计函数值为两个分量:从起始节点到节点n的代价以及从节点n到目标节点的代价。
代码设计
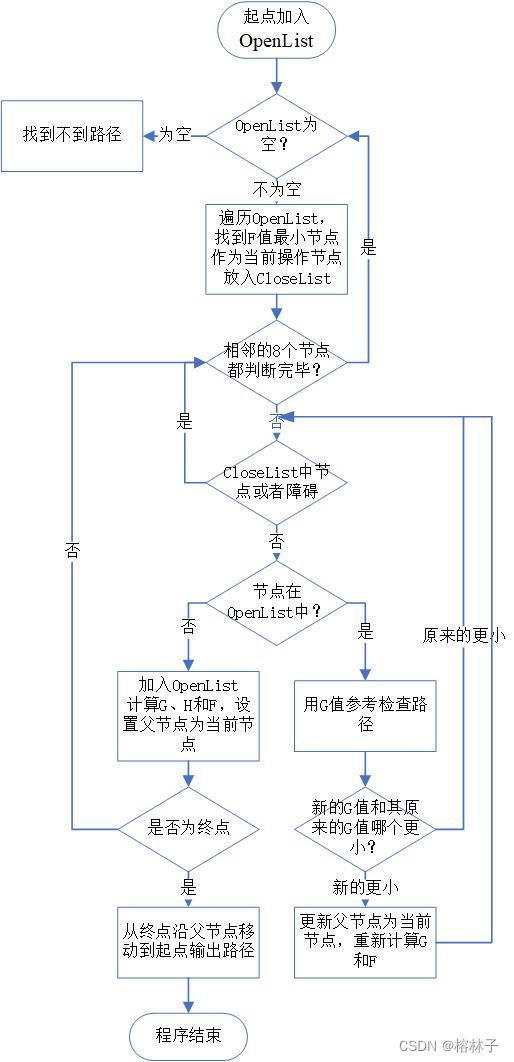
本次机器人路径规划优化采用A*算法,同时将采用动画GUI的方式显示寻路过程,所以采用Qt开发,A*算法寻路方式如下:
- 把起点加入 open list 。
- 重复如下过程:
a. 遍历open list,查找 F 值最小的节点,把它作为当前要处理的节点。
b. 把这个节点移到close list。
c. 对当前方格的 8 个相邻方格的每一个方格。
· 如果它是不可抵达的或者它在close list中,忽略它。否则,做如下操作。
· 如果它不在 open list 中,把它加入open list,并且把当前方格设置为它的父亲,记录该方格的F,G和H值。
· 如果它已经在open list中,检查这条路径(即经由当前方格到达它那里)是否更好,用G值作参考。更小的G值表示这是更好的路径。如果是这样,把它的父亲设置为当前方格,并重新计算它的G和F值。如果你的open list是按F值排序的话,改变后你可能需要重新排序。
d. 停止,当你把终点加入到了open list中,此时路径已经找到了,或者查找终点失败,并且open list是空的,此时没有路径。 - 保存路径。从终点开始,每个方格沿着父节点移动直至起点,便是路径。
程序设计
A*算法模拟
在A*算法中,按照上述的流程框图设计程序,需要注意的特殊情况为当用户设置了一个闭合区域的路径,即不存在路径从起点到终点,则需要弹出来一个对话框提示用户,路径不可达,如下图,同时停止A *算法的寻路过程,还原界面状态。

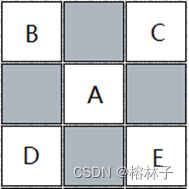
同时本程序设置的默认模式是,寻路过程中,是可以直接跨过“墙角”的,这样路径会更加灵活,但是存在一个问题是当两个障碍物在对角时,它会判断为可过,如下图,路径①和路径②均为一个障碍物的“墙角”,路径①为A至B,同时在中心块的左上角存在一个障碍物,路径②为C至D,不存在障碍物。这样的话,如果不做处理,程序在考虑中心块时,会将①和②视为同等路径且可以直接穿过,不符合逻辑。

综上情况,要增加特判,在考虑路径是否能通过时,还要考虑对角,例如,图4.5,当A在考虑B的时候,同时要特判A的上方和A的左侧是否存在障碍物,如果存在,则不允许通过,即不允许A至B,其他A至C、A至D、A至E同理,这四种情况都是不允许通过的情况。
同时还设置了每个格子所花费的代价,也就是Gx的代价,代码如下:
#define COST_DIET 10 //定义一格花费10
#define COST_LINE 14 //对角线花费14
为了取整,设置上下左右代价为10,走对角代价为√2,换算为14,最后根据A*算法的流程图模拟实现即可。
编程
界面设计是一个难题,再次分析需求,设置一个起点,设置一个终点,设置若干个障碍物,根据A*算法,从起点找到一条可以到达终点的路径,因此,需要一个比较大的二维网格图,然后有设置起点、设置终点、设置障碍和路径显示的功能,据此,设计GUI界面和逻辑功能,同时根据模块化思想,故设计多个类,文件结构如下图,接下来详细说明各个部分的代码逻辑。
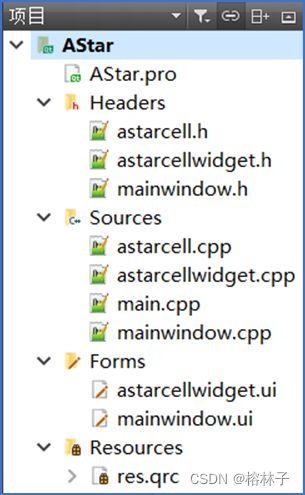
根据开发工程模块化的思想,使用MVC框架开发,M是指Model业务模型,V是指View用户界面,C则是Controller控制器,使用MVC的目的是将M和V的实现代码分离,从而使同一个程序可以使用不同的表现形式。在图4.6中,View为Forms目录下的两个ui文件,做主要界面设计,astarcellwidget.ui是一个单元格的界面,mainwindow.ui是程序主界面;Controller为astarcellwidget.cpp和mainwindow.cpp文件,前者是单元格的控制器,后者是主界面的控制器;Model是astarcell.cpp,这是单元格的主要数据结构;最后是Resources目录下的res.qrc文件,这个主要是程序要用到的图片,例如程序的头像。
首先是每一个格子的说明,对应代码文件中的astarcellwidget.cpp和astarcell.cpp,在astarcell.cpp中定义了AStarCell类的主要数据结构;
class AStarCell : public QObject
{
Q_OBJECT
public:
explicit AStarCell(QObject *parent = nullptr);
int parent_x = -1;
int parent_y = -1;
QString printAStar();
void initCell();
void setGx(int gx);
void setHx(int hx);
int getGx();
int getHx();
int getFx();
signals:
void changeGx();
void changeHx();
private:
int gx;
int hx;
int fx;
public slots:
};
成员变量一共五个,分别是:gx、hx、fx、parent_x和parent_y,前三个对应A*算法中的g(x)、h(x)和f(x),均为私有变量,后两个是为了最后的寻路而定义的变量,成员方法有initCell()方法,用来初始化一个格子的数据,printAStar()方法,用来打印输出g(x)、h(x)和f(x)的值,然后还有getter和setter,因为F=G+H,故没有setFx()方法,fx的值在hx和gx中的setter中同步更新。然后就是View的astarcellwidget.ui,主要是Gx、Hx和Fx值的显示。最后是Controller的astarcellwidget.cpp,定义了AStarCellWidget类,此类内容较多,首先要说明的是,单元格的类型,根据需求,可以总结出,一个单元格的类型有:初始、起点、终点、障碍物、路径候补点、路径点、用户选中这7类,定义一个枚举类型如下:
enum CellType
{
Null = 0,Start = 1,Barrier = 2,End = 3,Candidate = 4,Path = 5,Selected=6
} type;
然后就是根据不同的类型设置单元格的颜色,因为格子比较小,为了更好的显示信息,关闭了界面尺寸调节,同时设置了悬浮tips提示,将鼠标放在单元格的格子上,就会显示当前格子的Gx、Hx和Fx值。最后因为一个单元格有固有属性是此单元格在表格的哪个位置,所以设置了pos_x和pos_y来记录当前格子的位置,同时定义了每个格子的大小,表格中单元格的格式:
#define COLUMN_COUNT 24
#define ROW_COUNT 16
#define COLUMN_WIDTH 50
#define ROW_HEIGHT 50
单元格构建完毕之后,就是主界面的设计,主界面因为只有一个A*算法的模拟过程是属于模型,故不再另新建文件,将Controller和Model融合都放在mainwindow.cpp文件中的MainWindow类里。这是主界面的视图,接下来简述此部分代码逻辑。
主界面的按钮一共有5个,别是设置起点、设置终点、设置障碍、清除还原、开始寻路。设置起点按钮,选中一个单元格之后,点击设置起点或者按键盘上的B,即可把当前单元格设置为起点,内部的逻辑为,当用户选中一个单元格的时候,AStarCellWidget类会向MainWindow类发送一个信号,告诉后者用户选中那个单元格,然后用户点击设置起点按钮之后,MainWindow就会提取当前选中的点,如果有多选或者未选则提示错误,如果无错误,就将当前的格子设置为起点,然后调用AStarCellWidget的setCellType()方法设置类型。
设置终点、设置障碍按钮逻辑同理,清除还原是将当前界面的所有的单元格的类型都设置为初始,同时清空MainWindow类中保存的选中的点。
开始寻路按钮较为特殊,当点击之后,会检测是否选择了起点、是否选择了终点,然后会封锁一些控件防止用户误操作影响结果,然后初始化整个表格,然后开始运行A*算法寻找路径,当找完,还原被封锁的控件,如图4.9。还有一个控件是文本框,主要是用来设置寻路过程中每一步的速度,只能输入整数,如果不是整数的话,就会按照默认的50ms执行。
在MainWindow类中还定义了一个aStarFinishEvent()方法,这个方法是当A*算法找到了终点的时候执行,用来从终点出发按照搜索过程中设置的parent显示路径,然后将封锁的控件重新还原打开。
总结
本次实验遇到的棘手的问题一个是A*算法的模拟过程,查询了很多资料,最终理解了之后才编码模拟,第二个是Qt中的子Widget和父Widget的事件监听,因为想要实现子Widget(单元格)的鼠标点击事件监听,同时还要监听父Widget(主界面)的键盘事件,在Qt中默认优先子控件,然后父控件被过滤,查询了很多的资料和官方的API后,在子Widget用一句:
this->setAttribute(Qt::WA_KeyboardFocusChange,true);
来设置窗口焦点的获取,最后理清Qt事件处理的逻辑顺利关系,最终实现了子Widget鼠标监听和主界面的快捷键功能。
关于本次实验,学习了人工智能中的A*算法,相比在数据结构中学到的常见的搜索算法,非常具有优势,个人认为,A*算法的灵活在于H(x)的计算方法,本次实验中,本人主要用是曼哈顿距离计算H(x),一种理想化简单化的计算方法,在实际应用过程中,可以根据业务逻辑的要求,选择不同H(x)计算方法,来获得更好的、更智能的路径规划。
本次实验设计,基于Qt、A*算法实现的机器人路径规划优化,学到了很多东西,获益匪浅,但本实验中还存在很多优化,例如,处于closeList中的节点同样可以拿出来考虑,由于时间有限,资料查阅有限,故选择了一种简单的实现方式,其次,界面的友好性可以继续优化,例如方便用户一键多选等等,还有很大的优化和进步空间。
的、更智能的路径规划。
本次实验设计,基于Qt、A*算法实现的机器人路径规划优化,学到了很多东西,获益匪浅,但本实验中还存在很多优化,例如,处于closeList中的节点同样可以拿出来考虑,由于时间有限,资料查阅有限,故选择了一种简单的实现方式,其次,界面的友好性可以继续优化,例如方便用户一键多选等等,还有很大的优化和进步空间。
总而言之吧,获益匪浅,=w=