强化学习之图解PPO算法和TD3算法
强化学习之图解PPO和TD3算法
- 0. 引言
- 1. PPO算法
-
- 1.1 网络结构
- 1.2 产生experience的过程
- 1.3 Actor网络的更新流程
- 1.4 Critic网络的更新流程
- 2. TD3算法
-
- 2.1 网络结构
- 2.2 产生experience的过程
- 2.3 Actor网络的更新流程
- 2.4 Critic网络的更新流程
- 2.5 总结
0. 引言
关于on-policy和off-policy的定义,网上有很多不同的讨论,我认为,on-policy和off-policy的差异在于训练目标策略 所用到的数据 ( s , a , r , s ′ ) (s,a,r,s') (s,a,r,s′)(有时候也表现为数据 ( s , a , r , s ′ , a ′ ) (s,a,r,s',a') (s,a,r,s′,a′))是不是当前目标策略(此时还没开始训练)得到的,如果是目标策略得到的,那么就是on-policy,如果不是,那么就是off-policy。
比如在SARSA算法中,目标策略(即更新Q表的动作 a ′ a' a′)是基于Q表的 ϵ \epsilon ϵ-贪婪策略,它会成为下一条数据 ( s , a , r , s ′ , a ′ ) (s,a,r,s',a') (s,a,r,s′,a′)的 a a a(或者说当前数据 ( s , a , r , s ′ , a ′ ) (s,a,r,s',a') (s,a,r,s′,a′)的 a ′ a' a′),因此为on-policy算法。

在Q-learning算法中,目标策略(即更新Q表的那个动作 a ′ a' a′)是基于Q表的完全贪婪策略,但它并不会成为下一条数据 ( s , a , r , s ′ ) (s,a,r,s') (s,a,r,s′)的 a a a,而数据 ( s , a , r , s ′ ) (s,a,r,s') (s,a,r,s′)中的 a a a是基于Q表的 ϵ \epsilon ϵ-贪婪策略,因此为off-policy算法。

(注:以上两张截图摘自:https://www.zhihu.com/question/57159315)
PPO算法因为在buffer里使用的数据都是由目标策略 π θ o l d \pi_{\theta_{old}} πθold得到,只是会多更新几次 π θ o l d \pi_{\theta_{old}} πθold,将 θ o l d \theta_{old} θold更新之后得到 θ \theta θ,那么buffer里的数据都不能再用了,需要清空buffer,因此是on-policy算法.(其实因为PPO存在一个buffer多更新几次的情况,所以说它的off-policy也有一定道理,但它总体上还是on-policy)
DDPG算法和TD3算法思路相同,就放在一起讲了,可以看到目标策略更新之后,buffer里的数据并不会清空,会夹杂着旧的数据一起采样训练,所以他们都是off-policy算法。

1. PPO算法
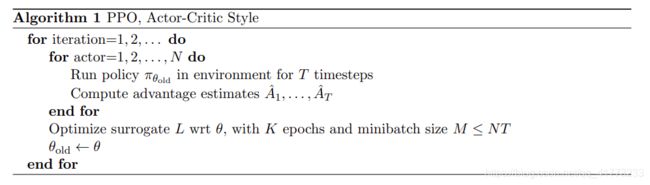
邻近策略优化(Proximal Policy Optimization,PPO)算法的网络结构有两个。PPO算法解决的问题是离散动作空间和连续动作空间的强化学习问题,是on-policy的强化学习算法。论文原文见《Proximal Policy Optimization Algorithms》。
1.1 网络结构
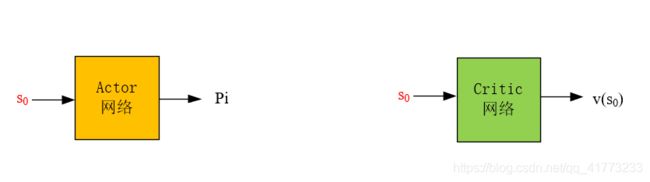
一个actor网络,一个critic网络。
actor网络的输入为状态,输出为动作概率 π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st)(对于离散动作空间而言)或者动作概率分布参数(对于连续动作空间而言)
critic网络的输入为状态,输出为状态的价值。
显然,如果actor网络输出的动作越能够使优势(优势的定义等下给出)变大,那么就越好。如果critic网络输出的状态价值越准确,那么就越好。
1.2 产生experience的过程
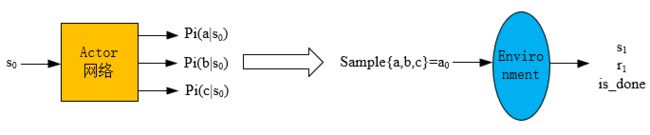
已知一个状态 s 0 s_0 s0,通过 actor网络 得到所有动作的概率(图中以三个动作:a,b,c为例),然后依概率采样得到动作 a 0 a_0 a0,然后将 a 0 a_0 a0输入到环境中,得到 s 1 s_1 s1和 r 1 r_1 r1。状态价值 v ( s 0 ) v(s_0) v(s0)是通过critic网络输出得到的,这样就得到一个experience: ( s 0 , a 0 , r 1 , v ( s 0 ) , l o g P ( a 0 ∣ s 0 ) ) (s_0, a_0, r_1, v(s_0), log P(a_0|s_0)) (s0,a0,r1,v(s0),logP(a0∣s0)),然后将experience放入经验池中(当然之后还会计算 A ( s 0 , a 0 ) A(s_0,a_0) A(s0,a0)以及 G 0 G_0 G0,经验池中也存了这两个信息)。
(注:虽然 v ( s 0 ) v(s_0) v(s0)可以用一条轨迹的折扣回报得到,即: v ( s 0 ) = r 1 + γ r 2 + ⋯ + γ T r T + 1 + γ T + 1 v ( s T + 1 ) v(s_0)=r_1+\gamma r_2 + \dots + \gamma^{T}r_{T+1}+\gamma^{T+1}v(s_{T+1}) v(s0)=r1+γr2+⋯+γTrT+1+γT+1v(sT+1),但是轨迹末状态的下一状态 s T + 1 s_{T+1} sT+1的 v ( s T + 1 ) v(s_{T+1}) v(sT+1)还是需要critic网络来估计,当然如果 s T + 1 s_{T+1} sT+1是正常游戏结束,而不是达到了最大步长,那么令 v ( s T + 1 ) = 0 v(s_{T+1})=0 v(sT+1)=0。与其这样,还不如用critic网络直接估计 v ( s 0 ) v(s_0) v(s0),而且值得注意的是, v ( s 0 ) = r 1 + γ r 2 + ⋯ + γ T r T + 1 + γ T + 1 v ( s T + 1 ) v(s_0)=r_1+\gamma r_2 + \dots + \gamma^{T}r_{T+1}+\gamma^{T+1}v(s_{T+1}) v(s0)=r1+γr2+⋯+γTrT+1+γT+1v(sT+1)正是我们critic网络作为监督学习的真值)
以上是离散动作的情况,如果是连续动作,就输出概率分布的参数(比如高斯分布的均值和方差),然后按照概率分布去采样得到动作 a 0 a_0 a0.
经验池 存在的意义是为了,更加方便地计算,一条轨迹上状态的累积折扣回报 v ( s t ) v(s_t) v(st)以及优势 A ( s t , a t ) A(s_t,a_t) A(st,at),而不是消除experience的相关性。
1.3 Actor网络的更新流程
首先来看优势函数 A A A的定义(论文中使用的符号为 A t ^ \hat{A_t} At^,注:论文中的 r t r_t rt为笔者文章的 r t + 1 r_{t+1} rt+1):

因为Actor网络需要输出的动作优势尽可能地大,所以它的训练需要用以下表达式作为Loss函数

其中:

值得注意的是: 和TD3算法的单步TD不同,PPO算法使用多步TD,因此它需要跑完一条轨迹后,才开始计算各个状态的累积回报和动作的优势。具体而言,状态价值 v ( s 0 ) , v ( s 1 ) v(s_0),v(s_1) v(s0),v(s1)是通过critic网络输出得到的,动作优势 A ( s 0 , a 0 ) A(s_0,a_0) A(s0,a0)是通过首先计算 δ 0 = r 1 + v ( s 1 ) − v ( s 0 ) \delta_0 = r_1+v(s_1)-v(s_0) δ0=r1+v(s1)−v(s0),然后用 γ λ \gamma \lambda γλ作为折扣因子去计算动作优势 A ( s 0 , a 0 ) A(s_0,a_0) A(s0,a0),具体可以看公式(11)。
因此训练actor网络的时候需要,将经验池中的所有数据都拿出来,计算loss,然后用梯度上升法,多更新几步梯度。更新完成后即将经验池清空,等待下一个新的actor网络与环境互动去收集数据。
pytorch代码如下:
# train actor net
all_pi_tensor = self.actor_net(state_tensor)
pi_tensor = all_pi_tensor.gather(1, action_tensor.unsqueeze(1)).squeeze(1)
surrogate_advantage_tensor = (pi_tensor / old_pi_tensor) * advantage_tensor
clip_times_advantage_tensor = 0.1 * surrogate_advantage_tensor
max_surrogate_advantage_tensor = advantage_tensor + torch.where(advantage_tensor > 0.,
clip_times_advantage_tensor, -clip_times_advantage_tensor)
clipped_surrogate_advantage_tensor = torch.min(
surrogate_advantage_tensor, max_surrogate_advantage_tensor)
actor_loss_tensor = -clipped_surrogate_advantage_tensor.mean()
self.actor_optimizer.zero_grad()
actor_loss_tensor.backward()
self.actor_optimizer.step()
1.4 Critic网络的更新流程
Actor网络更新后,接着拿从经验池buffer中采出的数据进行Critic网络的更新(数据已经计算了状态价值,折扣回报 G t G_t Gt 的计算是基于多步TD的方法,从那个状态开始,用每一步环境返回的奖励 R R R 与折扣因子相乘后累加,即: G t = r t + 1 + γ r t + 2 + ⋅ ⋅ ⋅ + γ T − t r T + 1 + γ T + 1 − t v ( s T + 1 ) G_t=r_{t+1} + \gamma r_{t+2} + \cdot\cdot\cdot + \gamma^{T-t} r_{T+1}+ \gamma^{T+1-t} v(s_{T+1}) Gt=rt+1+γrt+2+⋅⋅⋅+γT−trT+1+γT+1−tv(sT+1) ),其中 v ( s T + 1 ) v(s_{T+1}) v(sT+1)为网络的估计值,更新方式即为:计算好的折扣回报 G t G_t Gt与Critic网络预测当前状态价值 v ( s t ) v(s_t) v(st)做差,用MSEloss作为Loss函数,对神经网络进行训练。
pytorch代码如下:
# train critic net
pred_tensor = self.critic_net(state_tensor)
critic_loss_tensor = self.critic_loss(pred_tensor, return_tensor)
self.critic_optimizer.zero_grad()
critic_loss_tensor.backward()
self.critic_optimizer.step()
2. TD3算法
双重延迟深度确定性策略梯度(Twin Delayed Deep Deterministic Policy Gradient,TD3)算法的网络结构有六个。TD3算法解决的问题是连续动作空间的强化学习问题,是off-policy的强化学习算法。论文原文见《Addressing Function Approximation Error in Actor-Critic Methods》。
2.1 网络结构
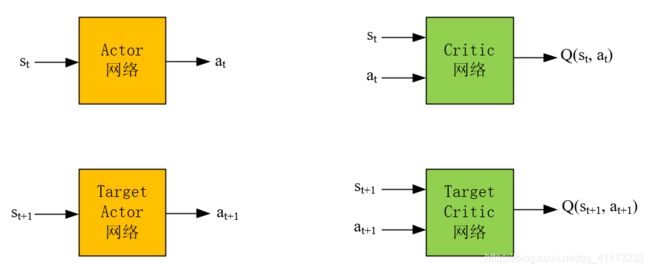
作为对比,首先来看深度确定性策略梯度(DDPG)的网络结构,有四个,分别如下所示:
TD3算法的网络结构为以下六个:
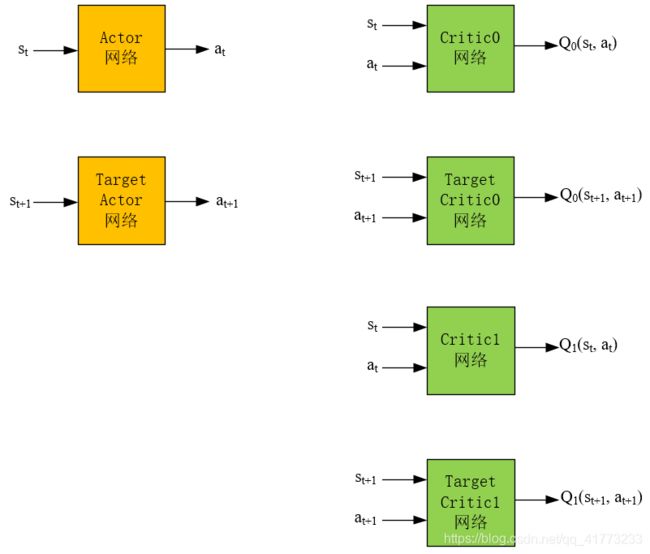
Actor网络和Critic网络的作用和DDPG完全一致(DDPG的内容可以参考:图解DQN,DDQN,DDPG网络),即:
Actor网络输入是状态,输出是动作。Critic网络输入是状态和动作,输出是对应的Q值。
Actor网络的目的是根据状态 s t s_t st,能够输出使得 Q ( s t , a t ) Q(s_t,a_t) Q(st,at)最大的动作 a t a_t at,这个 a t a_t at越能使 Q ( s t , a t ) Q(s_t,a_t) Q(st,at)大,就说明网络训练地越好。
Critic网络的目的是根据状态动作对 ( s t , a t ) (s_t,a_t) (st,at)能够输出其action value Q ( s t , a t ) Q(s_t,a_t) Q(st,at),这个 Q Q Q值越精确,就说明网络训练地越好。
Actor网络和Target Actor网络的区别是,Actor网络是每步都会在经验池中更新,而Target Actor网络是隔一段时间将Actor的网络参数拷贝到Target Actor网络中,实现Target Actor网络的更新。这种“滞后”更新是为了保证在训练Actor网络时训练的稳定性。Critic网络和Target Critic网络也是一样。
2.2 产生experience的过程
已知一个状态 s 0 s_0 s0,通过 actor网络 得到动作 a 0 ′ a'_0 a0′,然后再加噪声 N N N得到动作 a 0 = a 0 ′ + N a_0=a'_0+N a0=a0′+N(噪声是为了保证一定的探索,且噪声是ornstein uhlenbeck过程),然后将 a 0 a_0 a0输入到环境中,得到 s 1 s_1 s1和 r 1 r_1 r1,这样就得到一个experience: ( s 0 , a 0 , s 1 , r 1 ) (s_0, a_0, s_1, r_1) (s0,a0,s1,r1),然后将experience放入经验池中。
经验池 存在的意义是为了消除experience的相关性,因为强化学习中前后动作通常是强相关的,而将它们打散,放入经验池中,然后在训练神经网络时,随机地从经验池中选出一批experience,这样能够使神经网络训练地更好。

2.3 Actor网络的更新流程
从经验池中取出一批experience,这里以一个experience: ( s 0 , a 0 , s 1 , r 1 ) (s_0, a_0, s_1, r_1) (s0,a0,s1,r1)为例讲述训练神经网络的过程。
其中:红色字母代表已知项。
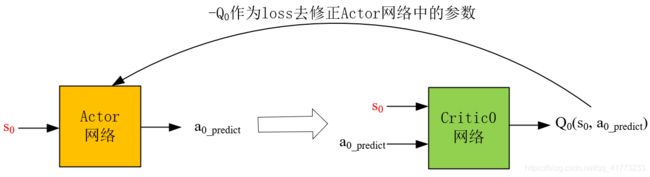
结合2.1中对Actor网络的描述可知,Actor网络的loss函数就是-Q,-Q越小越好。这个-Q需要由Critic0网络(用Critic1网络也是完全可行的)得到,如上图所示。
将experience中的 s 0 s_0 s0输入到Actor网络中,得到预测的动作 a 0 _ p r e d i c t a_{0\_predict} a0_predict,这里不加噪声了,直接将 s 0 s_0 s0和 a 0 _ p r e d i c t a_{0\_predict} a0_predict输入到Critic0网络中,得到Q值,然后将-Q作为loss函数,修正Actor网络。
pytorch代码示意如下,其中actor_evaluate_net即为actor网络,critic0_evaluate_net即为critic0网络:
pred_action_tensor = self.actor_evaluate_net(state_tensor)
pred_action_tensor = pred_action_tensor.clamp(self.action_low, self.action_high)
pred_state_action_tensor = torch.cat([state_tensor, pred_action_tensor], 1)
critic_pred_tensor = self.critic0_evaluate_net(pred_state_action_tensor)
actor_loss_tensor = -critic_pred_tensor.mean()
self.actor_optimizer.zero_grad()
actor_loss_tensor.backward()
self.actor_optimizer.step()
值得注意的是,Actor网络是最重要的,因为它直接决定了我们采取策略的好坏(从2.2小节中也可以看出,与环境互动的网络只有Actor网络),而想要训练出一个好的Actor网络,需要一个准确的Critic网络来评价它,因此TD3的剩下5个网络都是为了创造出一个尽可能精确的Critic网络(而DDPG是用3个网络创造出一个尽可能精确的Critic网络,TD3是DDPG的改进版)
2.4 Critic网络的更新流程
接着上述experience: ( s 0 , a 0 , s 1 , r 1 ) (s_0, a_0, s_1, r_1) (s0,a0,s1,r1)为例讲述训练Critic网络的过程

其中:红色字母代表已知项。
结合2.1中对Critic网络的描述可知,Critic网络需要使预测的Q值越精确越好,原本的DDPG算法只是借助Target Actor网络和Target Critic网络对Critic网络进行修正,其中Target Actor网络的目的是为了让Critic网络更容易稳定收敛,如果用频繁更新的Actor网络做下一步动作的预测,会导致Critic网络很难收敛,Target Critic网络的目的与Target Actor网络的目的相同,也是想用一个更新不频繁的网络让Critic网络稳定收敛。
TD3算法用了两个Target Critic网络是考虑到在实际的应用中,Critic网络总是过高的估计Q值,它借鉴了DDQN的思想,采用两个网络对Q值进行估计,然后选择较小的那个,这样尽可能地避免过高地估计Q值。(DDQN是两个估计价值Q的网络一个网络负责找动作,一个网络负责找动作对应的Q值)
也正是因为用了两个Target Critic网络,所以频繁更新的Critic网络也需要采用两个,用 r 1 + γ ∗ m i n { Q 0 ( s 1 , a 1 N ) , Q 1 ( s 1 , a 1 N ) } r_1+\gamma * min\{Q_0(s_1,a_{1N}), Q_1(s_1,a_{1N})\} r1+γ∗min{Q0(s1,a1N),Q1(s1,a1N)}来更新两个Critic网络,即用 r 1 + γ ∗ m i n { Q 0 ( s 1 , a 1 N ) , Q 1 ( s 1 , a 1 N ) } r_1+\gamma * min\{Q_0(s_1,a_{1N}), Q_1(s_1,a_{1N})\} r1+γ∗min{Q0(s1,a1N),Q1(s1,a1N)}分别与 Q 0 ( s 0 , a 0 ) Q_0(s_0,a_{0}) Q0(s0,a0)和 Q 0 ( s 0 , a 0 ) Q_0(s_0,a_{0}) Q0(s0,a0)做均方差,然后作为loss对Critic网络进行梯度下降。
此外,还要注意TD3的一个小trick,它给Target Actor网络的预测动作 a 1 _ p r e d i c t a_{1\_predict} a1_predict加了一个噪声 N N N,变为动作 a 1 N a_{1N} a1N之后,才作为两个Target Critic网络的输入,文章认为这样做能够鼓励探索,从而让下一步的Q值更精确。(但是DDPG并没有这样做)
当然最后当时机合适时(这个通常是自己设置迭代次数),需要将Critic网络的参数更新到Target Critic网络参数中,将Actor网络的参数更新到Target Actor网络参数中,通常采用软更新的方式,即延迟软更新。
pytorch代码示意如下:
next_action_tensor = self.actor_target_net(next_state_tensor)
noise_tensor = (0.2 * torch.randn_like(action_tensor, dtype=torch.float))
noisy_next_action_tensor = (next_action_tensor + noise_tensor
).clamp(self.action_low, self.action_high)
next_state_action_tensor = torch.cat([next_state_tensor, noisy_next_action_tensor], 1)
next_q0_tensor = self.critic0_target_net(next_state_action_tensor).squeeze(1)
next_q1_tensor = self.critic1_target_net(next_state_action_tensor).squeeze(1)
next_q_tensor = torch.min(next_q0_tensor, next_q1_tensor)
critic_target_tensor = reward_tensor + (1. - done_tensor) * self.gamma * next_q_tensor
critic_target_tensor = critic_target_tensor.detach()
state_action_tensor = torch.cat([state_tensor, action_tensor], 1)
critic_pred0_tensor = self.critic0_evaluate_net(state_action_tensor).squeeze(1)
critic0_loss_tensor = self.critic0_loss(critic_pred0_tensor, critic_target_tensor)
self.critic0_optimizer.zero_grad()
critic0_loss_tensor.backward()
self.critic0_optimizer.step()
critic_pred1_tensor = self.critic1_evaluate_net(state_action_tensor).squeeze(1)
critic1_loss_tensor = self.critic1_loss(critic_pred1_tensor, critic_target_tensor)
self.critic1_optimizer.zero_grad()
critic1_loss_tensor.backward()
self.critic1_optimizer.step()
2.5 总结
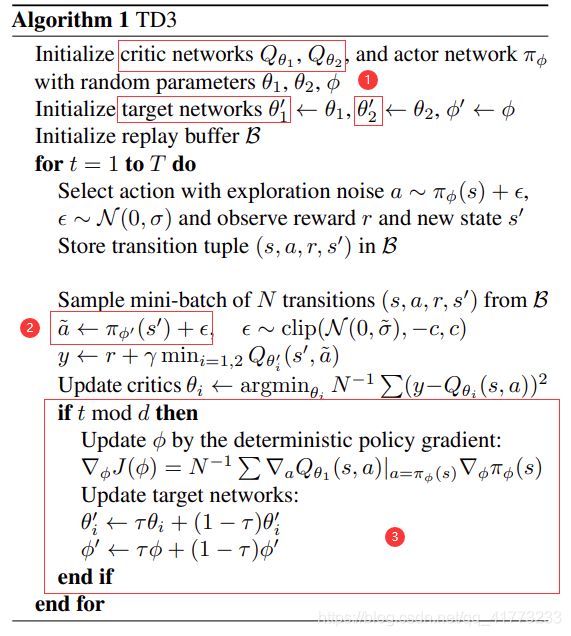
TD3的伪代码如下所示,TD3相比于DDPG有三个改进的地方:
一是将一个Target Critic网络变为两个Target Critic网络,取两者较小的作为下一状态的Q值,从而避免Q值过高地被估计。
二是对Target Actor 网络的输出进行了加噪声处理,从而使得Target Critic网络的预测输出Q值尽可能精确。
三是采用了延迟软更新的方式去更新一个Target Actor 网络、两个Target Critic网络,以及采用延迟更新的方式更新Actor网络。这样做的好处可以参考什么是TD3算法?(附代码及代码分析)