计算机视觉基础——图像处理(彩色空间互转)cpp+python
3.1 简介
图像彩色空间互转在图像处理中应用非常广泛,而且很多算法只对灰度图有效;另外,相比RGB,其他颜色空间(比如HSV、HSI)更具可分离性和可操作性,所以很多图像算法需要将图像从RGB转为其他颜色空间,所以图像彩色互转是十分重要和关键的。
3.2 学习目标
- 了解相关颜色空间的基础知识
- 理解彩色空间互转的理论
- 掌握OpenCV框架下颜色空间互转API的使用
3.3 内容介绍
1.相关颜色空间的原理介绍
2.颜色空间互转理论的介绍
3.OpenCV代码实践
3.4 算法理论介绍与资料推荐
3.4.1 RGB与灰度图互转
RGB(红绿蓝)是依据人眼识别的颜色定义出的空间,可表示大部分颜色。但在科学研究一般不采用RGB颜色空间,因为它的细节难以进行数字化的调整。它将色调,亮度,饱和度三个量放在一起表示,很难分开。它是最通用的面向硬件的彩色模型。该模型用于彩色监视器和一大类彩色视频摄像。
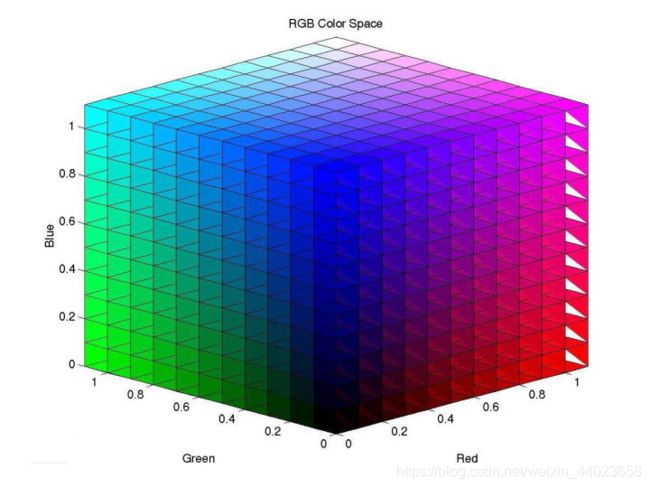
RGB颜色空间 基于颜色的加法混色原理,从黑色不断叠加Red,Green,Blue的颜色,最终可以得到白色,如图:

将R、G、B三个通道作为笛卡尔坐标系中的X、Y、Z轴,就得到了一种对于颜色的空间描述,如图

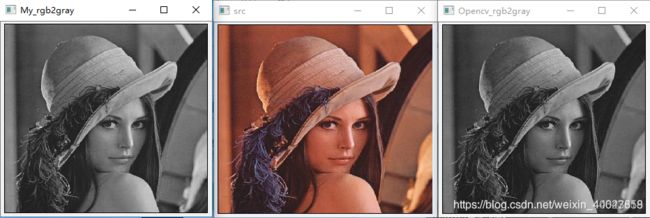
对于彩色图转灰度图,有一个很著名的心理学公式:
Gray = R * 0.299 + G * 0.587 + B * 0.114
直接计算因为是浮点型计算,所以复杂度较高,速度较低。所以我们考虑优化,可以将小数转为整数,除法变为移位,乘法也变为移位(整数计算比浮点型快,移位运算和加减法比乘除法快),但是这种方法也会带来一定的精度损失,我们可以根据实际情况选择需要保留的精度位数。下面给出不同精度(2-20位)的计算公式:
Grey = (R*1 + G*2 + B*1) >> 2
Grey= (R*2 + G*5 + B*1) >> 3
Grey= (R*4 + G*10 + B*2) >> 4
Grey = (R*9 + G*19 + B*4) >> 5
Grey = (R*19 + G*37 + B*8) >> 6
Grey= (R*38 + G*75 + B*15) >> 7
Grey= (R*76 + G*150 + B*30) >> 8
Grey = (R*153 + G*300 + B*59) >> 9
Grey = (R*306 + G*601 + B*117) >> 10
Grey = (R*612 + G*1202 + B*234) >> 11
Grey = (R*1224 + G*2405 + B*467) >> 12
Grey= (R*2449 + G*4809 + B*934) >> 13
Grey= (R*4898 + G*9618 + B*1868) >> 14
Grey = (R*9797 + G*19235 + B*3736) >> 15
Grey = (R*19595 + G*38469 + B*7472) >> 16
Grey = (R*39190 + G*76939 + B*14943) >> 17
Grey = (R*78381 + G*153878 + B*29885) >> 18
Grey =(R*156762 + G*307757 + B*59769) >> 19
Grey= (R*313524 + G*615514 + B*119538) >> 20
3.4.2 RGB与HSV互转
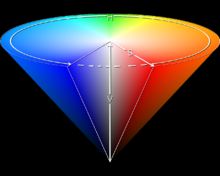
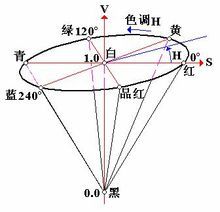
HSV是一种将RGB色彩空间中的点在倒圆锥体中的表示方法。HSV即色相(Hue)、饱和度(Saturation)、明度(Value),又称HSB(B即Brightness)。色相是色彩的基本属性,就是平常说的颜色的名称,如红色、黄色等。饱和度(S)是指色彩的纯度,越高色彩越纯,低则逐渐变灰,取0-100%的数值。明度(V),取0-max(计算机中HSV取值范围和存储的长度有关)。HSV颜色空间可以用一个圆锥空间模型来描述。圆锥的顶点处,V=0,H和S无定义,代表黑色。圆锥的顶面中心处V=max,S=0,H无定义,代表白色。
RGB颜色空间中,三种颜色分量的取值与所生成的颜色之间的联系并不直观。而HSV颜色空间,更类似于人类感觉颜色的方式,封装了关于颜色的信息:“这是什么颜色?深浅如何?明暗如何?
HSV模型
这个模型就是按色彩、深浅、明暗来描述的。
H是色彩;
S是深浅, S = 0时,只有灰度;
V是明暗,表示色彩的明亮程度,但与光强无直接联系。
应用:可以用于偏光矫正、去除阴影、图像分割等
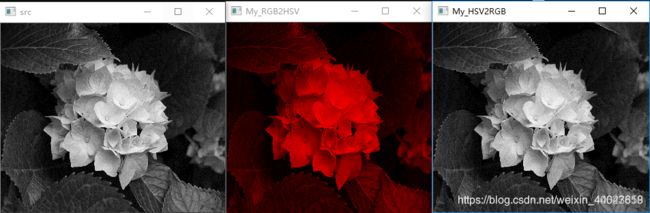
1.RGB2HSV

或
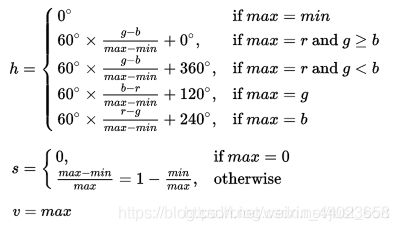
2.HSV2RGB

3.5 基于OpenCV的实现
工具:OpenCV3.1.0+VS2013
平台:WIN10
实现示例(python)
使用工具Python3.5
使用包cv2,numpy
涉及函数cv2.cvtColor(),cv2.inRange()
1.转换颜色空间
在 OpenCV 中有 超过150 种进行颜色空间转换的方法。但是你以后就会发现我们经常用到的也就两种:BGR↔Gray 和 BGR↔HSV。
我们用到的函数是cv2.cvtColor(input_imageflag),其中flag就是转换类型。
对于BGR↔Gray的转换,我们使用的flag就是cv2.COLOR_BGR2GRAY。
同样对于BGR↔HSV的转换我们用的flag就是cv2.COLOR_BGR2HSV。
你可以下的命令得到所有可用的 flag。
import cv2
flags=[i for in dir(cv2) if i startswith('COLOR_')]
print (flags)
在 OpenCV 的 HSV 格式中,H(色彩/色度)的取值范围是 [0,179], S(饱和度)的取值范围 [0,255],V(亮度)的取值范围 [0,255]。但是不同的软件使用的值可能不同。所以当你拿 OpenCV 的 HSV 值与其他软件的 HSV 值对比时,一定要记得归一化。
2.物体跟踪
现在我们知怎样将一幅图像从 BGR 换到 HSV 了,我们可以利用 一点来提取带有某个特定色的物体。在 HSV 颜色空间中要比在 BGR 空间中更容易表示一个特定颜色。在我们的程序中,我们提取的是一个蓝色的物体。下就是就是我们做的几步:
• 从视频中获取每一帧图像
• 将图像换到 HSV 空间
• 设置 HSV 阀值到蓝色范围。
• 获取蓝色物体,当然我们可以做其他任何我们想做的事,比如:在蓝色物体周围画一个圈。
import cv2
import numpy as np
cap = cv2.VideoCapture(0)
while(1):
#获取每一帧
ret,frame = cap.read()
#转换到HSV
hsv = cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)
#设定蓝色的阀值
lower_blue = np.array([110,50,50])
upper_blue = np.array([130,255,255])
#根据阀值构建掩模
mask = cv2.inRange(hsv,lower_blue,upper_blue)
#对原图和掩模进行位运算
res = cv2.bitwise_and(frame,frame,mask=mask)
#显示图像
cv2.imshow('frame',frame)
cv2.imshow('mask',mask)
cv2.imshow('res',res)
k = cv2.waitKey(5)&0xFF
if k == 27:
break
#关闭窗口
cv2.destroyAllWindows()
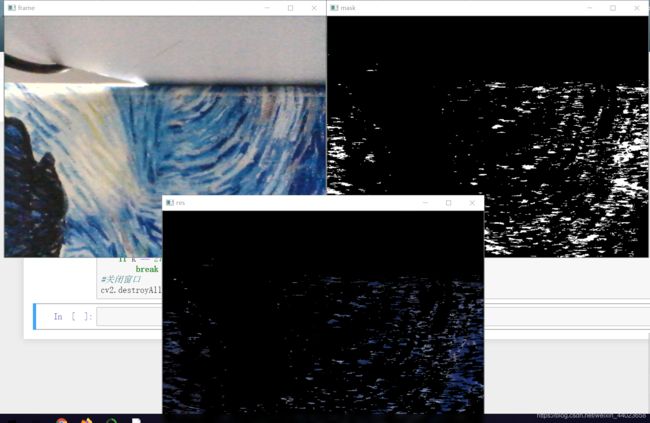 噪点还是很多,后面会介绍如何消减噪音。
噪点还是很多,后面会介绍如何消减噪音。
追踪物体轮廓,以后可以找物体中心,然后跟踪物体,可以在摄像头前挥挥手就可以画图等一些有趣的事。
3.怎样找到要跟踪对象的HSV值
函数cv2.cvtColor()可以用到这里,现在需要传入的参数是RGB的值而不是一幅图。例如要找到绿色的HSV值,只需在终端输入以下命令:
import cv2 import numpy as np
green=np.uint8([0,255,0]) hsv_green=cv2.cvtColor(green,cv2.COLOR_BGR2HSV)
error: /builddir/build/BUILD/opencv-2.4.6.1/ modules/imgproc/src/color.cpp:3541:
error: (-215) (scn == 3 || scn == 4) && (depth == CV_8U || depth == CV_32F) in function cvtColor
#scn (the number of channels of the source),
#i.e. self.img.channels(), is neither 3 nor 4.
# #depth (of the source),
#i.e. self.img.depth(), is neither CV_8U nor CV_32F.
# 所以不能用 [0,255,0] 而用 [[[0,255,0]]]
# 的三层括号应分别对应于 cvArray cvMat IplImage
green=np.uint8([[[0,255,0]]]) hsv_green=cv2.cvtColor(green,cv2.COLOR_BGR2HSV)
print (hsv_green )
[[[60 255 255]]]
现在你可以分别用 [H-100,100,100] 和 [H+100,255,255] 做上下阀值。除了个方法之外,你可以使用任何其他图像编辑软件(例如 GIMP) 或者在线换软件找到相应的 HSV 值,但是后别忘了调节 HSV 的范围。
函数原型(c++)
void cvtColor(InputArray src, OutputArray dst, int code, int dstCn=0)
src: 输入图像
dst: 输出图像
code: 颜色空间转换标识符
OpenCV2的CV_前缀宏命名规范被OpenCV3中的COLOR_式的宏命名前缀取代
注意RGB色彩空间默认通道顺序为BGR
具体可以参考: enum cv::ColorConversionCode部分
dstCn: 目标图像的通道数,该参数为0时,目标图像根据源图像的通道数和具体操作自动决定
实现示例(c++)
#include 进阶实现
1.RGB2GRAY
#include 2.RGB2HSV/HSV2RGB
#include 效果