单相Boost功率因数校正电路(PFC)设计与仿真(Simulink & Saber):第一章 PFC基础知识与电路参数设计
写在前面
教程是根据Mathworks公司的有源功率因数校正教程(点这里跳转)和那日沙等老师编著的《电力电子、电机控制系统的建模及仿真》改写的,设计思路基本与之一致,嫌看文章麻烦的同学可以直接跳转看视频和查阅相关书籍。Simulink仿真部分对视频内容展示的仿真电路做了一点简化,Saber仿真部分完全参考教材。在这篇教程中,我会详细撰写仿真电路的设计过程,包括仿真中控制器的各个参数如何获得。通过这系列教程,希望你能了解:
(1)PFC电路的基本工作原理;
(2)PFC电路的构成和参数设计;
(3)使用Simulink中的Control Design工具箱对系统做频率响应估计;
(4)控制器参数整定的大致思路;
(5)使用MATLAB的PID Tuner工具整定PID控制器参数。
希望这篇文章能帮助到你。如有不足之处虚心接受批评和建议,另希望转载的同学注明下出处,谢谢!
特别地,教程内容完全开源,不会用于商业用途。也请不要将教程中的内容用作商业用途。
第一章没有与仿真设计相关的内容,全部为基础知识,需要参阅仿真设计的伙计直接跳转到第二章。
第一章 PFC基础知识与电路参数设计
在电网中,我们可能会接入很多整流性负载,而整流性负载带来的很大问题就是电源的输入电流会带有很多谐波。比如这样一个经典的单相桥式不可控整流电路:
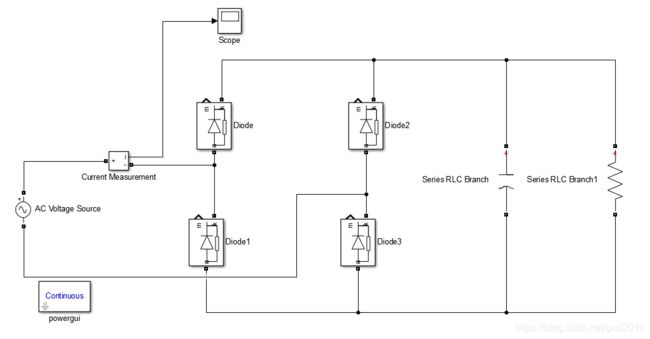
我们来观察下它的输入电流波形:
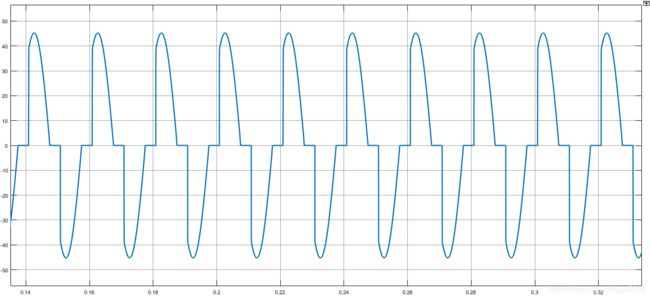
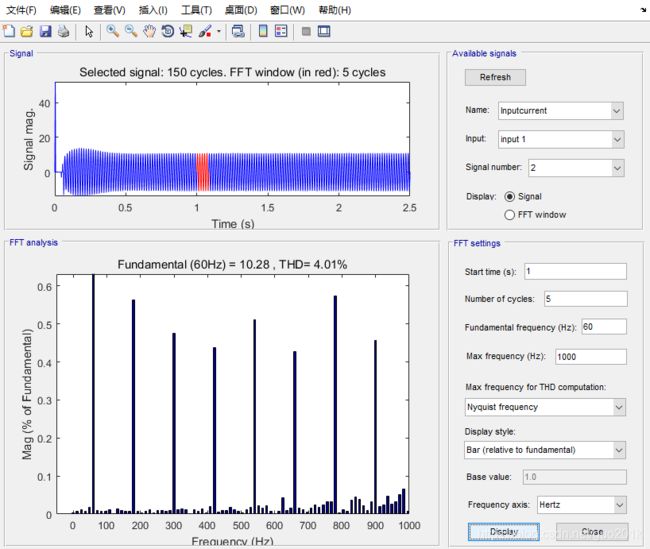
可以看出电流的畸变程度非常高。进一步地,还可以用powergui中的FFT(快速傅里叶变换)工具对波形的各次谐波进行分析。
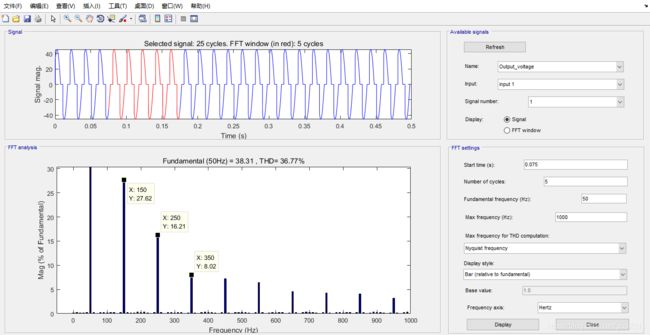
其中THD(总谐波失真)是衡量畸变程度的关键指标。THD指数很高意味着谐波分量过大,这样会导致电源输入的功率因数过低(功率因数与输入电流畸变程度成正比)。谐波电流会加剧电网中配电设备(发电机、变压器、线路)的损耗,干扰挂接在负载端其他用电设备的正常工作,还会造成电磁干扰;而功率因数过低会造成设备容量浪费、配电设备传输损耗加剧等影响。PFC(功率因数校正,Power Factor Correction)正是对负载改善其功率因数的一种手段。
PFC的实现思路有很多。本教程介绍应用于单相Boost电路在连续导通模式(CCM)下运行的PFC技术,其核心思路是通过控制电路中的开关管控制电感电流,使电感电流跟踪不可控整流后的“馒头波”电压指令,从而使输入电流呈正弦波形并与输入电压同相,校正了输入电流波形畸变程度和相位,达到改善功率因数的目的。
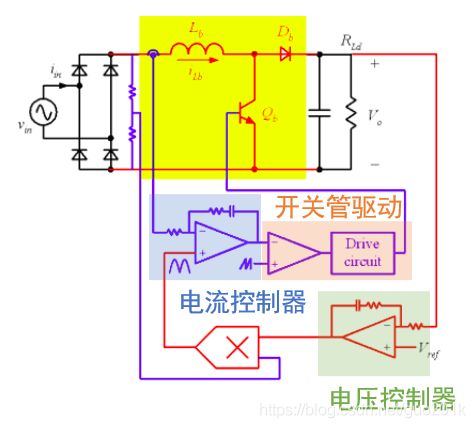
上图是PFC技术的实现框图。电路部分从左往右依次是:输入电压源,不可控整流桥,整流桥电压、电感电流采样,Boost电路,负载;控制部分包括为控制电感电流搭建的电流控制器,为稳定输出电压搭建的电压控制器,以及开关管驱动。
工作原理如下:电压闭环控制用于稳定输出电压,电压控制器产生控制指令(电压控制器的输出称为电压控制指令);而为了电感电流跟踪整流桥输出的“馒头波”波形(这样输入电流能够成为正弦波并与输入电压同相位),添加电流闭环来控制电感电流;将电压控制指令与整流桥输出电压采样相乘,形成“馒头波”式的控制指令,作为电流控制器的参考给定值;电流控制器输出的控制指令就是开关管的占空比,经开关管驱动控制开关管通断,控制电感电流跟踪参考给定值并稳定输出电压。
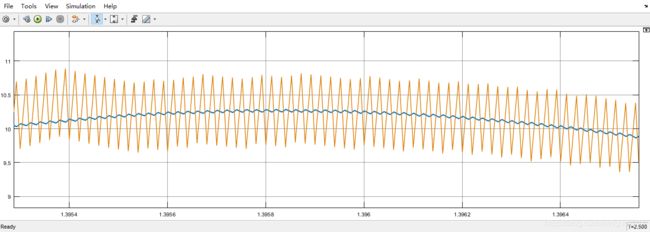
下图给出了Boost PFC中电流参考值和电感电流的仿真实测波形。控制电感电流跟踪参考给定值,电感电流(橙色)在参考给定值(蓝色)的附近上下环绕,电感电流近似为“馒头波”。

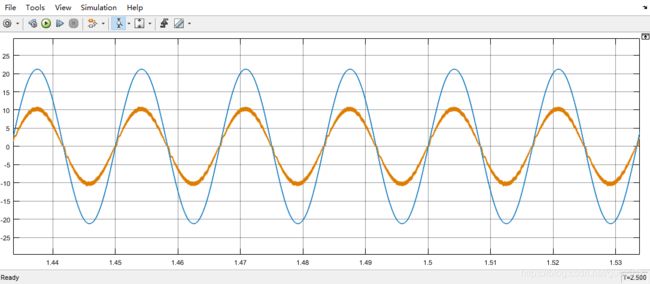
下图给出了应用PFC后电源电压和电流的仿真实测波形。经过PFC控制,输入电流(橙色)呈毛刺状正弦波,且与输入电压(蓝色)基本同相位,达到了功率因数校正的目的。
使用FFT工具分析运用PFC技术的输入电流波形,可以观察到THD大大减小。
接下来整定Boost PFC电路的硬件参数,电路部分主要包括电感、电容,以及变换器的一些参数。
电源的技术指标如下:
输入电压(
):交流120V;
输入电压频率(
):60Hz;
输出电压(
):直流400V;
输出功率(
):1000W;
开关频率(
):50kHz;
电感电流纹波(
):8%;
输出保持电压(
):300V;
输出保持时间(
):16.6ms;
电容电压纹波(
):10V;
Boost变换器效率(
):92%;
还有其他与仿真有关的指标见文末的m文件代码。
电感与电容参数计算流程:
- 计算电感所在支路,即Boost电路的输入端,通过的最大峰值电流
- 电感电流纹波
- 当Boost电路输入电流达到最大峰值电流
时占空比
- 电感取值
- 电容取值
,在范例中采用这一公式:
实际设计电路还要考虑功率器件的电压、电流应力等对器件选型,由于仿真采用理想器件,这里不再详细设计。
提前编写m文件,在运行仿真前需要先运行m文件,仿真中模块参数采用变量参数,这样方便电源的技术指标变化时修改指标快速整定参数。
%% Power Factor Correction (PFC) Continuous Conduction Mode Boost Converter
%
% Copyright 2018 The MathWorks, Inc.
clc;
clear all;
%% 设计指标参数
Line_Voltage_Peak = 120*sqrt(2); % 交流输入电压峰值 [V]
f_line = 60; % 输入电源频率 [Hz]
Voref = 400; % 输出电压给定参考值 [V]
Power = 1e3; % 最大稳态输出功率 [W]
R = 200; % 电阻负载阻值 [Ohms]
del_V = 10; % 输出电压纹波峰峰值 [V]
IndCurrRipple = 8; % 电感电流纹波比例 [%]
Conv_efficiency = 92; % Boost变换器额定效率 [%]
f_sw = 50e3; % 开关频率 [Hz]
Ts = 1/(100*f_sw); % 电路采样时间 [sec]
Tsc = 1/(50*f_sw); % 控制器采样时间 [sec]
t_holdup = 16.6e-3; % 输出保持电压(340V)的保持时间 [sec]
%% 变换器参数
Duty = (Voref-Line_Voltage_Peak)/Voref; % 占空比计算
I_in_peakmax = 2*(Power/(Conv_efficiency*0.01))/Line_Voltage_Peak;
% 输入电流峰值
%% 电感参数计算
del_I = (IndCurrRipple/100)*I_in_peakmax; % 电感电流纹波
L = (Line_Voltage_Peak*Duty)/(f_sw*del_I); % 电感值
%% 电容参数计算
C = max((2*Power*t_holdup)/((Voref)^2-340^2),Power/(2*pi*f_line*del_V*Voref));
% 电容值