深度网络架构的设计技巧(二)之BoT:Bottleneck Transformers for Visual Recognition

单位:UC伯克利,谷歌研究院(Ashish Vaswani, 大名鼎鼎的Transformer一作)
ArXiv:https://arxiv.org/abs/2101.11605
Github:https://github.com/leaderj1001/BottleneckTransformers
导读:
Transformer一词来自本文作者之一的Ashish Vaswani,了解Transformer的人或许知道Original Transformer,另一个说法叫Vaswani Transformer。而ViT刚出来就引爆学术圈,各大CNN任务用Transformer翻一遍就能达到SOTA;而现在是Transformer+自监督学习,即MAE的天下。本文向经典致敬,向大佬学习如何设计有效的深度网络,即在ResNet BottleNeck内如何引入多头注意力。
目录
- 一、摘要
- 二、引言
- 三、结构
-
- 3.1 相对位置编码
- 3.2 代码解读
- 四、实验
一、摘要
作者提出一个网络叫BoTNet,一个概念简单但强大的骨架模型,使用自注意力解决多个计算机视觉任务,如分类,检测与分割等。通过仅仅将ResNet骨架后三个基本模块中的空间CNN,替换为全局注意力而没有其他改变,该方法就能提升基线方法的性能,同时能够减少参数量和最小的延迟开销。通过BoTNet的设计,作者指出带有自注意力的ResNet模块也能当作Transformer模块。Without bells and whistles,避免花里胡哨,BoTNet超过了当前单模型单尺度的ResNeSt;在ImageNet-1K上获得84.7%的Top1精度,并且在TPU-v3上比EfficientNet快1.6倍。一个简单的模块替换,就能涨点与加速,又快又好!
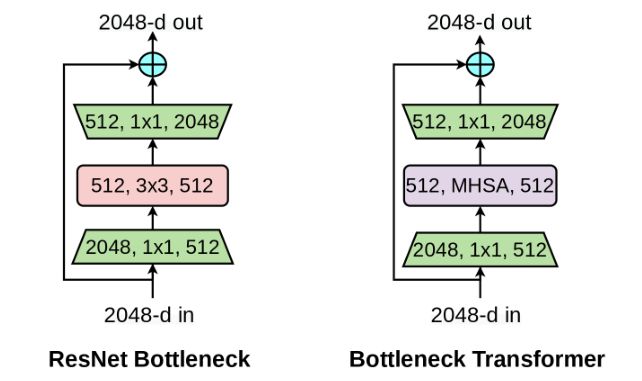
作者的核心设计即BottleNeck Transformer,将MHSA多头注意力替换原来 3 × 3 3 \times 3 3×3的卷积操作,一眼看穿!
二、引言
深度卷积骨架模型在图像分类、目标检测与实例分割中取得了重大进展。很多具有标志性的骨架架构采用 3 × 3 3 \times 3 3×3的多卷积层,如VGG,ResNet等。尽管CNN能够有效地捕捉局部信息,视觉任务如目标检测,实例分割和关键点检测需要建模长距离的依赖。例如,在实例分割中,能够从大范围里收集和关联场景信息将有利于学习目标之间的联系。为了全局聚合局部滤波器的响应,基于CNN的架构通常需要堆叠多层网络。尽管,这样做确实可以提升性能,但一种能够显式地建模全局(非局部)的机制能够更强大和可扩展,而不需要那么多层。
In order to globally aggregate the locally captured filter responses, convolution based architectures require stacking multiple layers [54, 28]. Although stacking more layers indeed improves the performance of these backbones [67], an explicit mechanism to model global (non-local) dependencies could be a more powerful and scalable solution without requiring as many layers.
对于NLP(natural language processing自然语言处理)来说,建模长距离依赖同样至关重要。自注意力是一种可计算的原作,它通过基于内容的寻址机制实现配对实体之间的交互,从而在长序列之间学习丰富的关联特征的层次架构。这成为了NLP中Transformer块的标准工具,突出的例子有GPT,BERT等。
一个简单使用视觉自注意力的方法就是Transformer中的多头注意力MHSA层来替换空间CNN层。最近这种方法已经从两个方面开展:1、一些模型如SASA,AACN,SANet,Axial-SASA等使用不同形式的自注意力如local, global, vertor, axial等去替换ResNet中的BottleNeck,另一方面就是ViT,它使用堆叠的Transformer块,在不重叠的图像块的线性映射上操作。这两类方法看似提出了不同的架构,但是作者觉得,ResNet BottleNeck with MHSA是某种类型的Transformer Block,除了残差连接和归一化层的微小差别。因此,作者将这种称为BottleNeck Transformer,即BoT。

三、结构

左:规范的Transformer结构;中:BottleNeck Transformer;右:一种BoT的实现,基于ResNet BottleNeck。

带有相对位置编码的多头注意力模块。自注意力层在带有可分离的相对位置编码的2D特征图上操作的,注意力逻辑表示是 q k T + q r T qk^T+qr^T qkT+qrT,其中 q , k , r q,k,r q,k,r代表询问、键和相对位置编码。
3.1 相对位置编码
在视觉任务中,相对位置编码更加合适,在多个模型中展现出优势。这样,自注意力不仅考虑数据内容的信息,也考虑了数据之间的相对位置。

通过以上表格,带有绝对位置编码的AP为42.5,小于相对位置编码的AP即43.6。相对位置编码,具有优势。
3.2 代码解读
class BottleBlock(nn.Module):
def __init__(
self,
*,
dim,
fmap_size,
dim_out,
proj_factor,
downsample,
heads = 4,
dim_head = 128,
rel_pos_emb = False,
activation = nn.ReLU()
):
super().__init__()
# shortcut
if dim != dim_out or downsample:
kernel_size, stride, padding = (3, 2, 1) if downsample else (1, 1, 0)
self.shortcut = nn.Sequential(
nn.Conv2d(dim, dim_out, kernel_size, stride = stride, padding = padding, bias = False),
nn.BatchNorm2d(dim_out),
activation
)
else:
self.shortcut = nn.Identity()
# contraction and expansion
attn_dim_in = dim_out // proj_factor
attn_dim_out = heads * dim_head
self.net = nn.Sequential(
nn.Conv2d(dim, attn_dim_in, 1, bias = False),
nn.BatchNorm2d(attn_dim_in),
activation,
Attention(
dim = attn_dim_in,
fmap_size = fmap_size,
heads = heads,
dim_head = dim_head,
rel_pos_emb = rel_pos_emb
),
nn.AvgPool2d((2, 2)) if downsample else nn.Identity(),
nn.BatchNorm2d(attn_dim_out),
activation,
nn.Conv2d(attn_dim_out, dim_out, 1, bias = False),
nn.BatchNorm2d(dim_out)
)
# init last batch norm gamma to zero
nn.init.zeros_(self.net[-1].weight)
# final activation
self.activation = activation
def forward(self, x):
shortcut = self.shortcut(x)
x = self.net(x)
x = x + shortcut
return self.activation(x)
注意力模块为:
class Attention(nn.Module):
def __init__(
self,
*,
dim,
fmap_size,
heads = 4,
dim_head = 128,
rel_pos_emb = False
):
super().__init__()
self.heads = heads
self.scale = dim_head ** -0.5
inner_dim = heads * dim_head
self.to_qkv = nn.Conv2d(dim, inner_dim * 3, 1, bias = False)
rel_pos_class = AbsPosEmb if not rel_pos_emb else RelPosEmb
self.pos_emb = rel_pos_class(fmap_size, dim_head)
def forward(self, fmap):
heads, b, c, h, w = self.heads, *fmap.shape
q, k, v = self.to_qkv(fmap).chunk(3, dim = 1)
q, k, v = map(lambda t: rearrange(t, 'b (h d) x y -> b h (x y) d', h = heads), (q, k, v))
q = q * self.scale
sim = einsum('b h i d, b h j d -> b h i j', q, k)
sim = sim + self.pos_emb(q)
attn = sim.softmax(dim = -1)
out = einsum('b h i j, b h j d -> b h i d', attn, v)
out = rearrange(out, 'b h (x y) d -> b (h d) x y', x = h, y = w)
return out
相对位置编码和绝对位置编码:
def rel_to_abs(x):
b, h, l, _, device, dtype = *x.shape, x.device, x.dtype
dd = {'device': device, 'dtype': dtype}
col_pad = torch.zeros((b, h, l, 1), **dd)
x = torch.cat((x, col_pad), dim = 3)
flat_x = rearrange(x, 'b h l c -> b h (l c)')
flat_pad = torch.zeros((b, h, l - 1), **dd)
flat_x_padded = torch.cat((flat_x, flat_pad), dim = 2)
final_x = flat_x_padded.reshape(b, h, l + 1, 2 * l - 1)
final_x = final_x[:, :, :l, (l-1):]
return final_x
def relative_logits_1d(q, rel_k):
b, heads, h, w, dim = q.shape
logits = einsum('b h x y d, r d -> b h x y r', q, rel_k)
logits = rearrange(logits, 'b h x y r -> b (h x) y r')
logits = rel_to_abs(logits)
logits = logits.reshape(b, heads, h, w, w)
logits = expand_dim(logits, dim = 3, k = h)
return logits
# positional embeddings
class AbsPosEmb(nn.Module):
def __init__(
self,
fmap_size,
dim_head
):
super().__init__()
height, width = pair(fmap_size)
scale = dim_head ** -0.5
self.height = nn.Parameter(torch.randn(height, dim_head) * scale)
self.width = nn.Parameter(torch.randn(width, dim_head) * scale)
def forward(self, q):
emb = rearrange(self.height, 'h d -> h () d') + rearrange(self.width, 'w d -> () w d')
emb = rearrange(emb, ' h w d -> (h w) d')
logits = einsum('b h i d, j d -> b h i j', q, emb)
return logits
class RelPosEmb(nn.Module):
def __init__(
self,
fmap_size,
dim_head
):
super().__init__()
height, width = pair(fmap_size)
scale = dim_head ** -0.5
self.fmap_size = fmap_size
self.rel_height = nn.Parameter(torch.randn(height * 2 - 1, dim_head) * scale)
self.rel_width = nn.Parameter(torch.randn(width * 2 - 1, dim_head) * scale)
def forward(self, q):
h, w = self.fmap_size
q = rearrange(q, 'b h (x y) d -> b h x y d', x = h, y = w)
rel_logits_w = relative_logits_1d(q, self.rel_width)
rel_logits_w = rearrange(rel_logits_w, 'b h x i y j-> b h (x y) (i j)')
q = rearrange(q, 'b h x y d -> b h y x d')
rel_logits_h = relative_logits_1d(q, self.rel_height)
rel_logits_h = rearrange(rel_logits_h, 'b h x i y j -> b h (y x) (j i)')
return rel_logits_w + rel_logits_h
四、实验
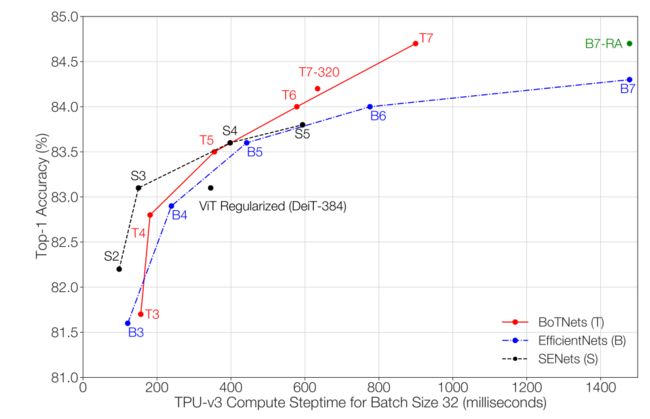
通过图表发现,BoTNet-T7展现出非常好的可扩展性,而BoTNet从T3到T5即堆叠的BoT块在3-5个内,优势并不明显。