使用ncnn在树莓派部署自己的yolov5lites模型
使用ncnn在树莓派部署自己的yolov5lites模型
文章目录
- 使用ncnn在树莓派部署自己的yolov5lites模型
- 前言
- 一、windows10上训练自己的yolov5lites模型
-
- 1 下载yolov5lites源码
- 2 配置yolov5lites运行环境
- 3 修改参数进行yolov5lites的训练
-
- 3.1 修改.yaml文件
- 3.2 修改输入为[320,320]
- 3.3 进行训练
- 3.4 生成先验框
- 3.5 可能遇到的bug,比如爆显存等等自己可以csdn一下。(坚持下去,多舔一舔)
- 3.6 这里贴一个将xml格式转换成yolov5lites训练所需的txt文件
- 二、数据的导出以及转换
-
- 1.last.onnx文件导出以及简化
- 三、树莓派环境依赖已经ncnn编译
-
- 1.树莓派环境依赖配置
- 2.ncnn配置以及编译
- 四、树莓派部署lite的ncnn细节
-
- 1.将lastsim.onnx转换为fp16的last.param和last.bin文件
- 2.添加yolov5lite.cpp到ncnn/examples文件夹下
- 3.修改yolov5lite.cpp
-
- 3.1 修改classclass_names
- 3.2 修改anchor的数据
- 3.3 修改lastsim.param
- 3.4 修改yolov5lites的ex.extract
- 3.5 在yolov5lites.cpp内修改路径
- 3.6 修改CMakelists.txt
- 五、测试效果
前言
记录一下入门小白的树莓派部署记录,前前后后走过不少坑。
一、windows10上训练自己的yolov5lites模型
1 下载yolov5lites源码
git clone https://github.com/ppogg/YOLOv5-Lite.git
2 配置yolov5lites运行环境
默认你在windows10上已经会配置环境,由于我本身已经配置好torch=1.7,torchvision=0.8,对应的cuda版本为11.0,还有对应的cudnn版本以及显卡驱动,我就在此环境下进行训练。并使用requirements.txt里的依赖(不需要重新配置相应的cuda以及cudnn)进行.onnx的导出
pip install -r requirements.txt
3 修改参数进行yolov5lites的训练
这一部分是记录转换xml格式为txt文件以及yolov5lites训练自己的模型等所需要的准备工作。
3.1 修改.yaml文件
为自己的训练种类以及个数

3.2 修改输入为[320,320]
将下载的v5lite-s.pt文件放在创建的weights/文件夹下。

3.3 进行训练
点击train.py,训练保存的权重在runs文件夹下

3.4 生成先验框
使用autoanchor.py,将生成的数据保存到v5lites.yaml
自己手动添加到对应的是C:\Users\jxbj2\Desktop\yolov5lite\YOLOv5-Lite-master\models\v5lite-s.yaml

3.5 可能遇到的bug,比如爆显存等等自己可以csdn一下。(坚持下去,多舔一舔)
3.6 这里贴一个将xml格式转换成yolov5lites训练所需的txt文件
文件夹准备如下,images放入图片,indata放入对应的xml格式文件,生成的txt文件会在labels文件夹下。
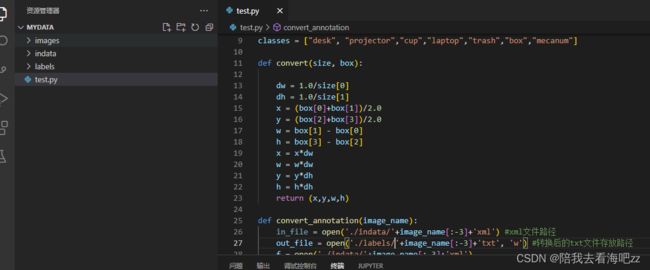
转换代码如下,如需调动测试以及验证数据集自己手动调yolov5lites的代码,换上自己对应修改的种类即可。
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir , getcwd
from os.path import join
import glob
classes = ["desk", "projector","cup","laptop","trash","box","mecanum"]
def convert(size, box):
dw = 1.0/size[0]
dh = 1.0/size[1]
x = (box[0]+box[1])/2.0
y = (box[2]+box[3])/2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
def convert_annotation(image_name):
in_file = open('./indata/'+image_name[:-3]+'xml') #xml文件路径
out_file = open('./labels/'+image_name[:-3]+'txt', 'w') #转换后的txt文件存放路径
f = open('./indata/'+image_name[:-3]+'xml')
xml_text = f.read()
root = ET.fromstring(xml_text)
f.close()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
cls = obj.find('name').text
if cls not in classes:
print(cls)
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w,h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
wd = getcwd()
if __name__ == '__main__':
#for image_path in glob.glob("./images/train/*.jpg"): #每一张图片都对应一个xml文件这里写xml对应的图片的路径
for image_path in glob.glob("./images/*.jpg"): #每一张图片都对应一个xml文件这里写xml对应的图片的路径
image_name = image_path.split('\\')[-1]
convert_annotation(image_name)
二、数据的导出以及转换
这部分的导出我是在windows上完成的,我尝试了一下在树莓派上去导出,但一直报导出错误。
1.last.onnx文件导出以及简化
python export.py --weights weights/last.pt

会在weights/文件夹下生成对应的last.onnx文件

使用onnx-simplifier对转换后的onnx进行简化,将last.onnx文件放到yolov5lite-master文件下输入在终端输入以下指令
python -m onnxsim last.onnx lastsim.onnx

将简化后的lastsim.onnx放入u盘,导入到树莓派中
三、树莓派环境依赖已经ncnn编译
1.树莓派环境依赖配置
sudo apt-get install git cmake
sudo apt-get install -y gfortran
sudo apt-get install -y libprotobuf-dev libleveldb-dev libsnappy-dev libopencv-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install --no-install-recommends libboost-all-dev
sudo apt-get install -y libgflags-dev libgoogle-glog-dev liblmdb-dev libatlas-base-dev
2.ncnn配置以及编译
$ git clone https://gitee.com/Tencent/ncnn.git
cd ncnn
mkdir build
cd build
cmake ..
make -j4
make install
四、树莓派部署lite的ncnn细节
1.将lastsim.onnx转换为fp16的last.param和last.bin文件
对应路径自己修改(应当具备基础的命令行使用能力哈哈哈哈哈)
cd ncnn/build
./tools/onnx/onnx2ncnn lastsim.onnx lastsim.param lastsim.bin
./tools/ncnnoptimize lastsim.param lastsim.bin last.param last.bin 65536
2.添加yolov5lite.cpp到ncnn/examples文件夹下
具体代码如下所示
// Tencent is pleased to support the open source community by making ncnn available.
//
// Copyright (C) 2020 THL A29 Limited, a Tencent company. All rights reserved.
//
// Licensed under the BSD 3-Clause License (the "License"); you may not use this file except
// in compliance with the License. You may obtain a copy of the License at
//
// https://opensource.org/licenses/BSD-3-Clause
//
// Unless required by applicable law or agreed to in writing, software distributed
// under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
// CONDITIONS OF ANY KIND, either express or implied. See the License for the
// specific language governing permissions and limitations under the License.
#include "layer.h"
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include 3.修改yolov5lite.cpp
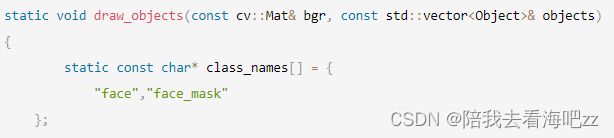
3.1 修改classclass_names
修改成你所需要的检测种类,“desk”, “bicycle”, “cup”, “laptop”, “trash”, “box”, “mecanum”
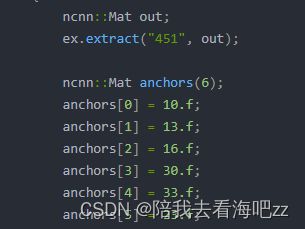
3.2 修改anchor的数据
对应的是C:\Users\jxbj2\Desktop\yolov5lite\YOLOv5-Lite-master\models\v5lite-s.yaml
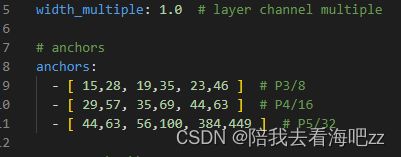
将上面这些anchor的数据(15,28,19,35,23,46)放入yolov5lite.cpp中的以下代码中,第一行的六个数据对应10,13,16,30,33,23)
对应的还有两个对应的地方也做出同样修改即可。
3.3 修改lastsim.param
将Reshape 0=x全部设置为0=-1,如画圈所示
3.4 修改yolov5lites的ex.extract
打开lastsim.param文件,对应上图三个方框里的 onnx::Sigmoid_647改写到ex.extract里面。

3.5 在yolov5lites.cpp内修改路径
修改好yolov5.cpp中lastsim.param和lastsim.bin的路径,并放到测试的文件夹内(路径)。
3.6 修改CMakelists.txt
进入到ncnn/examples/CMakelist.txt,如下图所示
输入指令
cd ncnn/build
cmake ..
make
完成编译。
五、测试效果
打开测试的文件夹,将编译好的yolov5.cpp可执行文件放到测试文件夹下,(在yolov5lite.cpp文件内选择摄像头还是图片,如果有图片记得放在测试文件夹下)。
cd pi/ceshi
./yolov5_lite.cpp
说实话,我用的树莓派4B,yolov5lites感觉效果都不是很好,接下来我要继续试一下int8的量化。