51单片机 1.概述及点灯测试
主要学习资料
江科大 51单片机入门教程
https://www.bilibili.com/video/BV1Mb411e7re?p=4&vd_source=169e0bcb4f2e42dcc73afa3b48bb3cac
单片机介绍
●单片机 英文 MicroControllerunit 简称MCU
●内部集成了CPU、RAM、ROM、定时器、中断系统、通讯接口等一系列电脑的常用硬件功能
●单片机的任务是信息采集(依靠传感器)、处理(依靠CPU)和硬件设备(例如电机,LED等)的控制
●单片机跟计算机相比,算是一个袖珍版的计算机,一个芯片就能构成完整的计算机系统。但在性能上,与计算机相差甚远,但MCU成本低、体积小、结构简单,在生活和 工业控制领域大有所为
●学习使用单片机是了解计算机原理与结构的最佳选择
●51单片机是对兼容英特尔8051指令系统的单片机的统称
STC89C52单片机(本学习使用的开发板型号)
●所属系列:51单片机系列
●公司:STC公司
●位数:8位
●RAM:512字节
●ROM:8K(Flash)
●工作频率:12MHZ
命名规则
●STC89C52系列单片机命名规则
STC – 公司
89 – 芯片系列 STC12T/6T 8051
C – 工作电压:C:5.5V-3.8V LE:3.6V-2.4V/3.4V-2.4V
52 – 程序空间及RAM空间大小。
如:
51是4K字节程序空间及512字节RAM空间;
52是8K字节程序空间及512字节RAM空间;
53是12K字节程序空间及512字节RAM空间;
14是14K字节程序空间及512字节RAM空间;
54是16K字节程序空间及1280字节RAM空间;
58是32K字节程序空间及1280字节RAM空间;
510是40K字节程序空间及1280字节RAM空间;
512是48K字节程序空间及1280字节RAM空间;
514是56K字节程序空间及1280字节RAM空间;
516是62K字节程序空间及1280字节RAM空间;
40 – 工作频率
I – 工作温度范围:I:工业级 -40℃-85摄氏度 C:商业级 0℃-70℃
PDIP – 封装类型:如 PDIP,LQFP,PLCC,PQFP
40 – 管脚数
二进制转化十六进制

第一次点灯失败
在用STC-ISP将点灯程序下载到开发板上时,一直显示正在检测单片机,点灯失败;
失败原因:STC-ISP上单片机型号选择错误,需要严格按照所使用的的单片机型号选,我的单片机型号是STC89C52RC,我还按照视频教程选择了STC89C52
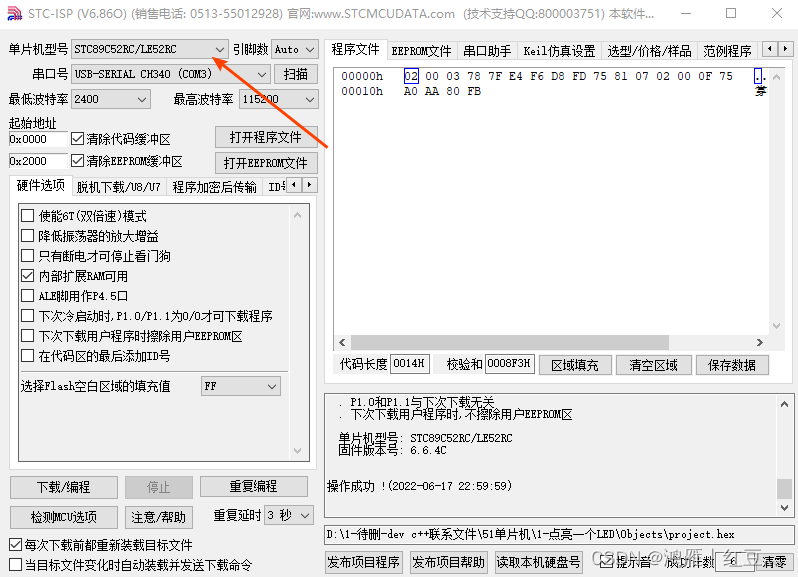
点灯成功

#include 点灯代码和之前学的C还是有点不一样的,主函数不需要返回值;之前的是
int main()
{
...
return 0;
}
当我试着按照之前的习惯,return 0 时,出现warning

LED灯闪烁
#include LED跑马灯
1.枚举
#include 2.位运算
#include 独立按键
按下亮灯,松手灯灭
#include 按一下亮,再按一下灭
这里需要有一个非常重要的注意点,那就是按键抖动,有硬件消抖,也有软件消抖;我们这里采用软件消抖;

#include 按键显示二进制
#include 按键控制LED位移
#include 小结
千里之行,始于足下。我已经会点灯,离做出智能机器人不远了!!!