AMASLAB-EPIC-KBS工控机Ubuntu基础环境配置
AMASLAB-EPIC-KBS工控机Ubuntu基础环境配置
本文以Ubuntu18.04为例,介绍如何在新装的Ubuntu系统上进行一些基础的环境配置;
相关的环境有:WIFI配置、双屏幕配置(独显)、中文输入法、换源、ROS Melodic、ORB-SLAM2基础环境、Clion(C++编辑器)、Pycharm(Python编辑器)、Quickq(笔者用的tizi)、chorme、typora(文档编辑器)、flameshot(截图工具)、docker。
1.WIFI配置
实验室使用的EPIC-KBS工控机默认并没有WIFI硬件,所以想要联网的话有两种解决方法:额外装配WIFI硬件或者使用网线连接路由器。
这里我选择的是 额外装配WIFI硬件,我使用的是 B-Link的一款WIFI接收器,插上去就能直接联网使用。
Note:并不是所有的WIFI接收器都是适配linux的。

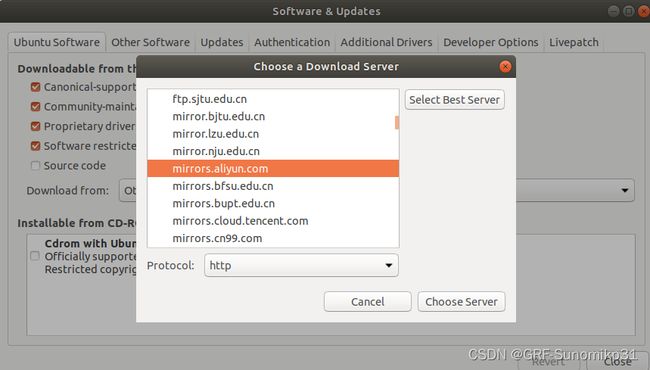
2.换源
关于换源的问题,笔者个人的建议是:不主动换源,需要的时候直接在Software&update换源;当使用apt-get update更新失败,或者下载相关软件包找不到源时建议试试换源。

3.中文输入法
这里选择自带的中文输入法安装,安装流程以及参考教程如下:
https://blog.csdn.net/qq21497936/article/details/124964176
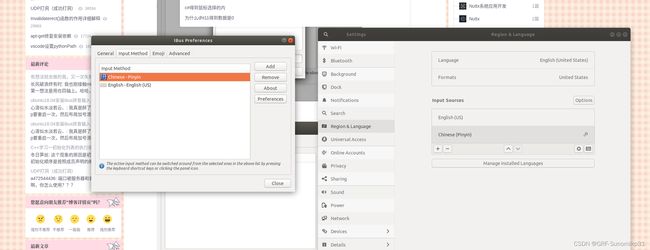
这里有个小坑,输入:sudo ibus-setup 相关设置完成后,如果直接点close,则在设置中的语言找不到chinese(pinyin),如下图所示(左边是教程上的截图,右边是实际情况):
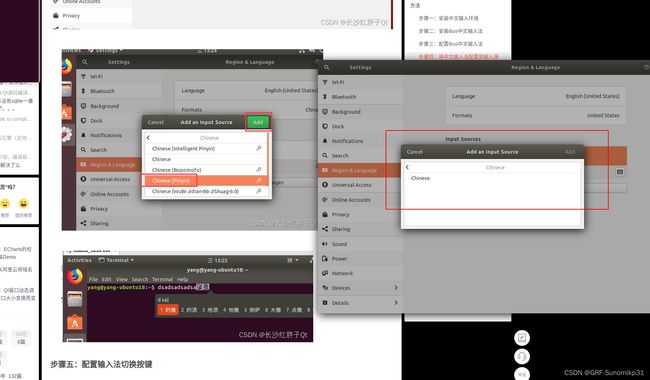
正确做法是:输入:sudo ibus-setup 相关设置完成后,不要close,直接在设置进行相关配置即能找到:
WIN+space(空格)或者shift 切换输入法。
4.ROS
Ubuntu18.04的ROS版本是Melodic,相关的安装教程和流程如下:
-
参考官方教程:http://wiki.ros.org/melodic/Installation/Ubuntu
-
前面都不需要梯子,在软件源里选择最合适的镜像源即可;
-
如果安装过程没报错,完成之后,输入:
roscore,能跑起来就说明安装完成 -
如果sudo rosdep init报错如下:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
- 参考笔者自己写的教程解决这个问题:https://blog.csdn.net/qq_44847636/article/details/115610906
5.chorme
官网直接下载安装:https://www.google.cn/intl/zh-CN/chrome/
chorme好用的点在于,当你登录了账号之后 可以将之前在其他笔记本电脑的chorme设置直接同步到新电脑平台上,linux环境同样适用。
deb软件包安装命令:sudo dpkg -i package.deb
6.typora
typora是一个很好的支持markdowwn的编辑器,最重要的是typora的windows版本是收费的,但是linux版本是免费的!具体安装见官网:https://typora.io/#linux
这里有两种安装方式,命令行在线安装和直接下载安装包安装,推荐后者 直接下载安装包安装,不需要牵扯软件源的问题。
7.flameshot
flameshot是一个轻量级很好用的截图工具,参考教程:https://blog.csdn.net/qq_36999496/article/details/104113111
截图快捷键:ctrl+alt+A;(这里采用了QQ截图的快捷键)
8.Clion
Clion是一款很好用的C++编辑器,支持原https://blog.csdn.net/qq_63379469/article/details/123213504生的CMakeList;官网链接:https://www.jetbrains.com/clion/download/#section=linux;Clion有30天的试用机会,可以使用学校邮箱注册,可免费使用一年。
参考安装注册教程:https://blog.csdn.net/weixin_43784003/article/details/116458216
测试邮箱:[email protected]
密码:xxxxxxxx(不可见).
9.Pycharm
Pycharm是一个很好用的python编辑器,方便管理控制多个不同的版本;这里建议和anaconda一起使用。
官网链接:https://www.jetbrains.com/pycharm/download/#section=linux;选择Community社区版下载即可。
安装配置参考教程:https://blog.csdn.net/qq_63379469/article/details/123213504
10.ORB-SLAM2基础环境
ORB-SLAM2是目前视觉SLAM主流的框架,这里会测试ORB-SLAM2依赖ROS和不依赖ROS的两种运行方式。
官方代码:https://github.com/raulmur/ORB_SLAM2,参考:https://blog.csdn.net/weixin_44436677/article/details/105587986;这里注意pangolin和opencv的版本。pangolin一定要手动选择安装pangolin0.5版本,否则后面将会报错;opencv最好是3.4.x版本,推荐opencv3.4.1,请不要使用opencv4。
常见问题及解决方法:
-
error: ‘usleep’ was not declared in this scope:在相关报错的文件上加入头文件
#include。#以下文件要添加#includeExamples/Monocular/mono_euroc.cc Examples/Monocular/mono_kitti.cc Examples/Monocular/mono_tum.cc Examples/RGB-D/rgbd_tum.cc Examples/Stereo/stereo_euroc.cc Examples/Stereo/stereo_kitti.cc src/LocalMapping.cc src/LoopClosing.cc src/System.cc src/Tracking.cc src/Viewer.cc -
/usr/bin/ld: cannot find -lEigen3::Eigen:参考:https://github.com/raulmur/ORB_SLAM2/issues/1038,这里是pangolin版本的问题,请重装pangolin0.5版本。
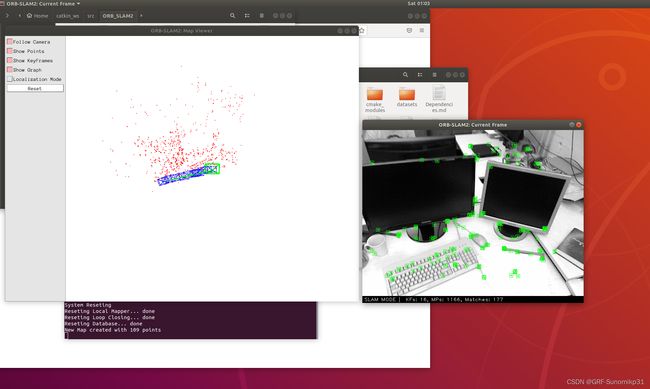
非ROS下的ORB-SLAM2测试,命令:./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/amas-lab-1/catkin_ws/src/ORB_SLAM2/datasets/rgbd_dataset_freiburg1_xyz
ROS环境ORB-SLAM2测试安装,参考教程:https://blog.csdn.net/m0_65009717/article/details/123885882
报错:
- /usr/lib/x86_64-linux-gnu/libboost_system.so: error adding symbols: DSO missing from command line:参考:https://blog.csdn.net/MAX_Hope/article/details/79508627 解决。
11.Quickq
这是笔者在用的一款tizi,官网链接:https://1sz.cc,选择linux(Ubuntu)使用的deb包直接下载安装即可。
12.激光SLAM
待测试…