多传感器融合技术简介
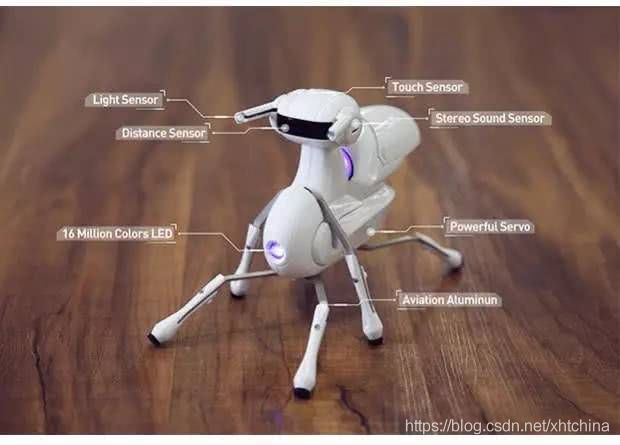
单一传感器获得的信息非常有限,而且,还要受到自身品质和性能的影响,因此,智能机器人通常配有数量众多的不同类型的传感器,以满足探测和数据采集的需要。人们提出了多传感器融合技术多传感器融合又称多传感器信息融合,有时也称作多传感器数据融合。以增加各个传感器之间的信息互通,提高整个系统的可靠性和稳健性,增强数据的可信度,提高精度,扩展系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。
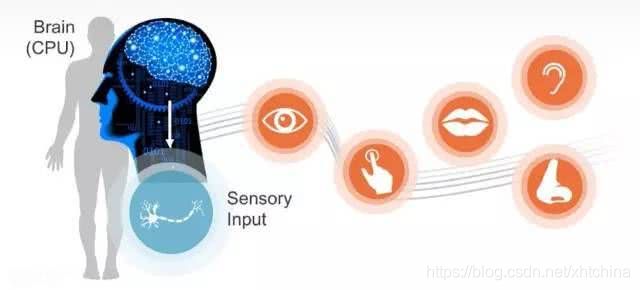
随着机器人技术的不断发展,机器人的应用领域和功能有了极大的拓展和提高。智能化已成为机器人技术的发展趋势,而传感器技术则是实现机器人智能化的基础之一。由于单一传感器获得的信息非常有限,而且,还要受到自身品质和性能的影响,因此,智能机器人通常配有数量众多的不同类型的传感器,以满足探测和数据采集的需要。若对各传感器采集的信息进行单独、孤立地处理,不仅会导致信息处理工作量的增加,而且,割断了各传感器信息间的内在联系,丢失了信息经有机组合后可能蕴含的有关环境特征,造成信息资源的浪费,甚至可能导致决策失误。为了解决上述问题人们提出了多传感器融合技术(multi-sensor fusion)。
1. 多传感器融合的意义
多传感器融合又称多传感器信息融合(multi-sensor information fusion),有时也称作多传感器数据融合(multi-sensor data fusion),于1973年在美国国防部资助开发的声纳信号处理系统中被首次提出,它是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。它从多信息的视角进行处理及综合,得到各种信息的内在联系和规律,从而剔除无用的和错误的信息,保留正确的和有用的成分,最终实现信息的优化,也为智能信息处理技术的研究提供了新的观念。

2. 多传感器融合的层次结构
多传感器融合在结构上按其在融合系统中信息处理的抽象程度,主要划分为三个层次: 数据层融合、特征层融合和决策层融合。
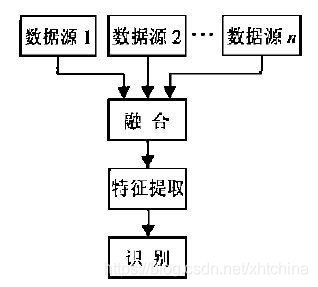
2.1. 数据层融合
也称像素级融合,首先将传感器的观测数据融合, 然后从融合的数据中提取特征向量, 并进行判断识别。数据层融合需要传感器是同质的(传感器观测的是同一物理现象) , 如果多个传感器是异质的(观测的不是同一个物理量) , 那么数据只能在特征层或决策层进行融合。数据层融合不存在数据丢失的问题, 得到的结果也是最准确的, 但计算量大,且对系统通信带宽的要求很高。
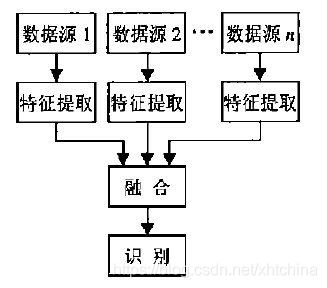
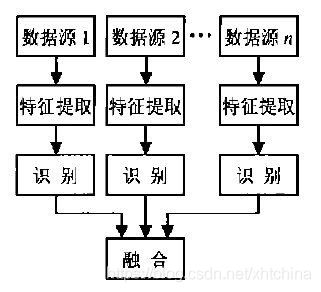
2.2. 特征层融合
特征层融合属于中间层次,先从每种传感器提供的观测数据中提取的有代表性的特征, 这些特征融合成单一的特征向量, 然后运用模式识别的方法进行处理。这种方法的计算量及对通信带宽的要求相对降低, 但由于部分数据的舍弃使其准确性有所下降。
2.3. 决策层融合
决策层融合属于高层次的融合,由于对传感器的数据进行了浓缩, 这种方法产生的结果相对而言最不准确, 但它的计算量及对通信带宽的要求最低。
对于特定的多传感器融合系统工程应用, 应综合考虑传感器的性能、系统的计算能力、通信带宽、期望的准确率以及资金能力等因素, 以确定哪种层次是最优的。另外, 在一个系统中, 也可能同时在不同的融合层次上进行融合。
3. 多传感器融合的算法
融合算法是融合处理的基础。它是将多元输入数据根据信息融合的功能要求,在不同融合层次上采用不同的数学方法,对数据进行综合处理,最终实现融合。目前已有大量的融合算法,它们都有各自的优缺点。这些融合算法总体上法可以分为三大类型:嵌入约束法、证据组合法、人工神经网络法。
3.1. 嵌入约束法
由多种传感器所获得的客观环境的多组数据就是客观环境按照某种映射关系形成的像,传感器信息融合就是通过像求解原像,即对客观环境加以了解。用数学语言描述就是,即使所有传感器的全部信息,也只能描述环境的某些方面的特征,而具有这些特征的环境却有很多,要使一组数据对应惟一的环境(即上述映射为一一映射),就必须对映射的原像和映射本身加约束条件,使问题能有惟一的解。嵌入约束法有两种基本的方法:贝叶斯估计和卡尔曼滤波。
3.2. 证据组合法
证据组合法认为完成某项智能任务是依据有关环境某方面的信息做出几种可能的决策,而多传感器数据信息在一定程度上反映环境这方面的情况。因此,分析每一数据作为支持某种决策证据的支持程度,并将不同传感器数据的支持程度进行组合,即证据组合,分析得出现有组合证据支持程度最大的决策作为信息融合的结果。
证据组合法是为完成某一任务的需要而处理多种传感器的数据信息。它先对单个传感器数据信息每种可能决策的支持程度给出度量(即数据信息作为证据对决策的支持程度),再寻找一种证据组合方法或规则,使在已知两个不同传感器数据(即证据)对决策的分别支持程度时,通过反复运用组合规则,最终得出全体数据信息的联合体对某决策总的支持程度,得到最大证据支持决策,即传感器信息融合的结果。
常用的证据组合方法有:概率统计方法、D-S(Dempster-Shafer)证据推理法。
3.3. 人工神经网络法
人工神经网络通过模仿人脑的结构和工作原理,设计和建立相应的机器和模型并完成一定的智能任务。神经网络根据当前系统所接收到的样本的相似性,确定分类标准。这种确定方法主要表现在网络权值分布上,同时可采用神经网络特定的学习算法来获取知识,得到不确定性推理机制。采用神经网络法的多传感器信息融合,分三个主要步骤:
- 根据智能系统要求及传感器信息融合的形式,选择其拓扑结构;
- 各传感器的输入信息综合处理为一总体输入函数,并将此函数映射定义为相关单元的映射函数,通过神经网络与环境的交互作用把环境的统计规律反映网络本身的结构;
- 对传感器输出信息进行学习、理解,确定权值的分配,进而对输入模式作出解释,将输入数据向量转换成高级逻辑(符号)概念。
4. 小结
在多传感器融合技术中,融合结构、融合算法都占有重要地位。随着多传感器融合研究与应用的深入,未来的多传感器融合将会是一个更加复杂的信息处理过程,不仅包括许多具体的算法,而且结构也比较复杂。
如何根据实际应用将算法与结构有机地结合在一起,为整个融合系统提供更加有效的融合策略,这是未来多传感器融合研究所要解决的主要问题。目前已有大量的融合算法,它们都存在各自的优缺点,需要通过合理的融合结构将这些算法组合在一起,使其扬长避短,构成更加有效的融合方法。
另外,多传感器融合还将面临一个难题,那就是动态与未知环境下的融合问题,这无疑会对融合方法提出更高的要求。这不仅需要性能更好的融合算法,而且需要更加灵活的融合结构,提高融合系统的自适应性和鲁棒性。