U-Boot移植(在I.MX6ULL ALPHA开发板上移植)
U-Boot 在IMX6ULL上的移植(2)
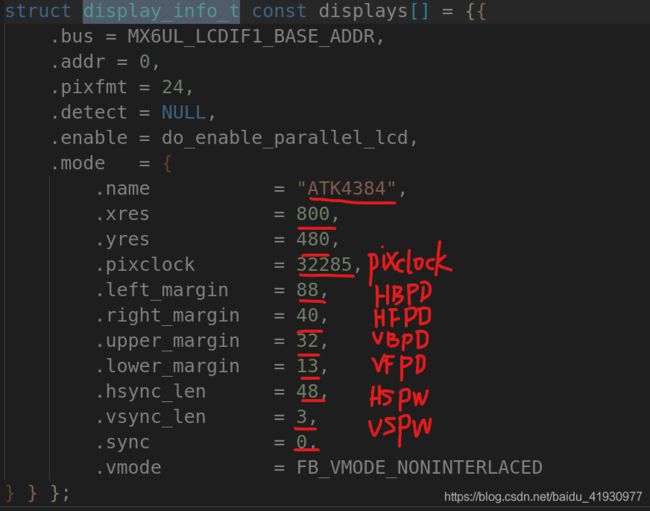
1. LCD(4.3寸,分辨率800x480)参数的修改
由于我使用的I.MX6ULL ALPHA开发板LCD原理图与NXP的一致,所以LCD的IO部分就不用修改了。需要修改的LCD参数在mx6ull_alientek_emmc.c文件中,在文件中找到名为struct display_info_t const display[] 的结构体。该结构体保存着LCD的名称变量,长、宽变量以及时间参数等等。在这个结构体中有一项参数:pixclock 像素时钟需要根据自己的LCD屏幕时间参数进行计算,计算公式如下:
pxclk = {[(VSPW+VBP+LINE+VFP) * (HSPW+HBP+HOZVAL+HFP)] * 60} **** (1)
以上参数都在LCD数据手册能找到。
pixclock = (1 / pxclk) * 10^12 ***************************************************** (2)
由1,2式即可计算出pixclock的值。
再打开mx6ull_alientek_emmc.h文件找到panel=TFTAB,改为:panel=ATK4384,这个名字随意。但是要与U-Boot环境变量中的panel的值一致,连接开发板,打开secureCRT,启动开发板进入U-Boot之后,输入printenv,查看panel环境变量的值是否为ATK4384,如果不是,使用如下指令修改:
setenv panel ATK4384
saveenv
只有保持一致,LCD屏幕才会显示NXP的LOGO以及U-Boot的编译时间
2. 网络驱动的修改
在这里使用的网卡是LAN8720A芯片,IMX6ULL ALPHA开发板的网卡引脚除了复位脚和NXP的不一样,其他引脚都一样,此外NXP使用的网络芯片是KSZ8081芯片,所以在源码中要删除KSZ80801的相关代码,并编写LAN8720A的相关代码。在mx6ull_alientek_emmc.c中找到如下代码删除并改成:
#define IOX_SDI IMX_GPIO_NR(5, 10)
#define IOX_STCP IMX_GPIO_NR(5, 7)
#define IOX_SHCP IMX_GPIO_NR(5, 11)
#define IOX_OE IMX_GPIO_NR(5, 8)
//修改为
#define ENET1_RESET IMX_GPIO_NR(5, 7)
#define ENET2_RESET IMX_GPIO_NR(5, 8 ).
NXP使用74LV595来扩展IO,以上删除都是74LV595的驱动代码,继续找到如下代码删除:
static iomux_v3_cfg_t const iox_pads[] = {
/* IOX_SDI */
MX6_PAD_BOOT_MODE0__GPIO5_IO10 | MUX_PAD_CTRL(NO_PAD_CTRL),
/* IOX_SHCP */
MX6_PAD_BOOT_MODE1__GPIO5_IO11 | MUX_PAD_CTRL(NO_PAD_CTRL),
/* IOX_STCP */
MX6_PAD_SNVS_TAMPER7__GPIO5_IO07 | MUX_PAD_CTRL(NO_PAD_CTRL),
/* IOX_nOE */
MX6_PAD_SNVS_TAMPER8__GPIO5_IO08 | MUX_PAD_CTRL(NO_PAD_CTRL),
static void iox74lv_init(void)
{
int i;
gpio_direction_output(IOX_OE, 0);
for (i = 7; i >= 0; i--) {
gpio_direction_output(IOX_SHCP, 0);
gpio_direction_output(IOX_SDI, seq[qn_output[i]][0]);
udelay(500);
gpio_direction_output(IOX_SHCP, 1);
udelay(500);
}
......
/*
* shift register will be output to pins
*/
gpio_direction_output(IOX_STCP, 1);
};
void iox74lv_set(int index)
{
int i;
for (i = 7; i >= 0; i--) {
gpio_direction_output(IOX_SHCP, 0);
if (i == index)
gpio_direction_output(IOX_SDI, seq[qn_output[i]][0]);
else
gpio_direction_output(IOX_SDI, seq[qn_output[i]][1]);
udelay(500);
gpio_direction_output(IOX_SHCP, 1);
udelay(500);
}
......
/*
* shift register will be output to pins
*/
gpio_direction_output(IOX_STCP, 1);
};
再找到如下代码:
int board_init(void)
{
......
imx_iomux_v3_setup_multiple_pads(iox_pads, ARRAY_SIZE(iox_pads));
iox74lv_init();
......
return 0;
}
删除其中的两个74lv595的初始化和配置代码。
继续找到如下代码:
static iomux_v3_cfg_t const fec1_pads[] = {
MX6_PAD_GPIO1_IO06__ENET1_MDIO | MUX_PAD_CTRL(MDIO_PAD_CTRL),
MX6_PAD_GPIO1_IO07__ENET1_MDC | MUX_PAD_CTRL(ENET_PAD_CTRL),
......
MX6_PAD_ENET1_RX_ER__ENET1_RX_ER | MUX_PAD_CTRL(ENET_PAD_CTRL), MX6_PAD_ENET1_RX_EN__ENET1_RX_EN | MUX_PAD_CTRL(ENET_PAD_CTRL),
};
static iomux_v3_cfg_t const fec2_pads[] = {
MX6_PAD_GPIO1_IO06__ENET2_MDIO | MUX_PAD_CTRL(MDIO_PAD_CTRL),
MX6_PAD_GPIO1_IO07__ENET2_MDC | MUX_PAD_CTRL(ENET_PAD_CTRL),
......
MX6_PAD_ENET2_RX_EN__ENET2_RX_EN | MUX_PAD_CTRL(ENET_PAD_CTRL),
MX6_PAD_ENET2_RX_ER__ENET2_RX_ER | MUX_PAD_CTRL(ENET_PAD_CTRL),
};
分别在两个结构最后一行添加如下两行代码:
MX6_PAD_SNVS_TAMPER7__GPIO5_IO07 | MUX_PAD_CTRL(NO_PAD_CTRL),
MX6_PAD_SNVS_TAMPER8__GPIO5_IO08 | MUX_PAD_CTRL(NO_PAD_CTRL),
这是添加开发板ENET1和ENET2两个网口的复位IO配置参数。
继续找到setup_iomux_fec()函数,将函数内容修改为:
static void setup_iomux_fec(int fec_id)
{
if (fec_id == 0) {
imx_iomux_v3_setup_multiple_pads(fec1_pads,
ARRAY_SIZE(fec1_pads));
gpio_direction_output(ENET1_RESET, 1);
gpio_set_value(ENET1_RESET, 0);
mdelay(20);
gpio_set_value(ENET1_RESET, 1);
}
else {
imx_iomux_v3_setup_multiple_pads(fec2_pads,
ARRAY_SIZE(fec2_pads));
gpio_direction_output(ENET2_RESET, 1);
gpio_set_value(ENET2_RESET, 0);
mdelay(20);
gpio_set_value(ENET2_RESET, 1);
}
}
函数 setup_iomux_fec 就是根据 fec1_pads 和 fec2_pads 这两个网络 IO 配置数组来初始化
I.MX6ULL 的网络 IO。我们需要在其中添加网络复位 IO 的初始化代码,并且复位一下 PHY 芯
片。
修改 drivers/net/phy/phy.c 文件中的函数 genphy_update_link,打开文件drivers/net/phy/phy.c,找到函数 genphy_update_link,这是个通用 PHY 驱动函数,此函数用于更新 PHY 的连接状态和速度。使用 LAN8720A 的时候需要在此函数中添加一些代码,修改后的函数 genphy_update_link 如下所示:
int genphy_update_link(struct phy_device *phydev)
{
unsigned int mii_reg;
static int lan8720_flag = 0;
int bmcr_reg = 0;
if (lan8720_flag == 0) {
bmcr_reg = phy_read(phydev, MDIO_DEVAD_NONE, MII_BMCR);
phy_write(phydev, MDIO_DEVAD_NONE, MII_BMCR, BMCR_RESET);
while(phy_read(phydev, MDIO_DEVAD_NONE, MII_BMCR) & 0X8000) {
udelay(100);
}
phy_write(phydev, MDIO_DEVAD_NONE, MII_BMCR, bmcr_reg);
lan8720_flag = 1;
}
/*
* Wait if the link is up, and autonegotiation is in progress
* (ie - we're capable and it's not done)
*/
mii_reg = phy_read(phydev, MDIO_DEVAD_NONE, MII_BMSR);
......
return 0;
}
至此网络的复位引脚驱动修改完成,重新编译 uboot,然后将 u-boot.bin 烧写到 SD 卡中并
启动,至此U-Boot移植完毕。
需要使用secureCRT修改网络环境变量,如下:
setenv ipaddr 192.168.1.50 //开发板 IP 地址
setenv ethaddr 00:04:9f:04:d2:35 //开发板网卡 MAC 地址
setenv gatewayip 192.168.1.1 //开发板默认网关
setenv netmask 255.255.255.0 //开发板子网掩码
setenv serverip 192.168.1.102 //服务器地址,也就是 Ubuntu 地址
saveenv //保存环境变量
大功告成!