数据结构与算法笔记
文章目录
-
-
- 1,数据结构
- 2,算法
- 3,排序算法
-
- 1,冒泡排序
- 2,插入排序
- 3,选择排序
- 4,归并排序
- 5,快速排序
- 6,通用排序算法
- 4,查找算法
-
- 1,二分查找
- 2,跳表
- 3,哈希表
- 4,二叉查找树
- 5,红黑树
- 6,堆
-
1,数据结构
线性表:

非线性表:

- 线性表
- 数组
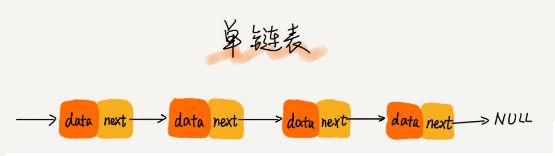
- 链表
- 单链表

- 双向链表

- 循环链表

- 双向循环链表

- 静态链表
- 栈:顺序栈、链式栈
- 队列
- 普通队列、双端队列
- 阻塞队列、并发队列、阻塞并发队列
- 散列表
- 散列函数
- 冲突解决:链表法、开放寻址
- 动态扩容
- 位图
- 树
- 二叉树
- 平衡二叉树、二叉查找树
- 平衡二叉查找树:AVL 树、红黑树
- 完全二叉树、满二叉树
- 多路查找树
- B 树、B+ 树
- 2-3 树、2-3-4 树
- 堆
- 小顶堆、大顶堆
- 优先级队列、斐波那契堆、二项堆
- 二叉树
- 图
- 图的存储:邻接矩阵、邻接表
- 拓扑排序、最短路径、关键路径
- 最小生成树、二分图、最大流
2,算法
- 复杂度分析
- 空间复杂度
- 时间复杂度:最好、最坏、平均、均摊
- 基本算法思想
- 贪心算法、分治算法、动态规划
- 回溯算法、枚举算法
- 排序
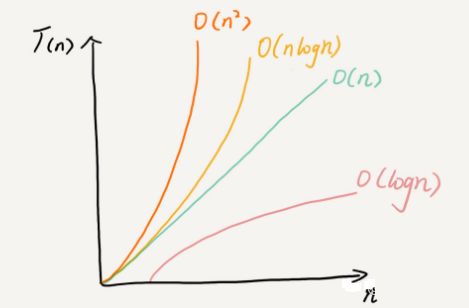
- O(n^2):冒泡排序、插入排序、选择排序、希尔排序
- O(nlogn):归并排序、快速排序、堆排序
- O(n):计数排序、基数排序、桶排序
- 搜索:深度优先搜索、广度优先搜索
- 查找:线性表查找、树结构查找、散列表查找
- 字符串匹配
- 朴素、KMP
- Robin-Karp、Boyer-Moore
- AC 自动机、Trie、后缀数组
3,排序算法
| 排序算法 | 平均时间复杂度 | 空间复杂度 | 是否原地排序 | 是否稳定 | 是否基于比较 | |
|---|---|---|---|---|---|---|
| 冒泡 | O(n^2) | O(1) | Y | Y | Y | |
| 插入 | O(n^2) | O(1) | Y | Y | Y | |
| 选择 | O(n^2) | O(1) | Y | N | Y | |
| 希尔 | O(n^2) | O(1) | Y | N | Y | |
| 递归思想 | 快排 | O(nlogn) | O(1) | Y | N | Y |
| 递归思想 | 归并 | O(nlogn) | O(n) | N | Y | Y |
| 堆排序 | O(nlogn) | O(1) | Y | N | Y | |
| 线性排序 | 桶排序 | O(n) | N | Y | N | |
| 线性排序 | 计数排序 | O(n) | N | Y | N | |
| 线性排序 | 基数排序 | O(n) | N | Y | N |
希尔排序是对插入排序的优化。
原地排序算法:指空间复杂度是 O(1) 的排序算法。
稳定性是指:如果待排序的序列中存在值相等的元素,经过排序之后,相等元素之间保持原有的先后顺序。
- 冒泡排序、插入排序、选择排序这三种排序算法,时间复杂度都是O(n^2),比较高,适合小规模数据的排序。
- 归并排序,快速排序这两种排序算,都采用了分治思想,时间复杂度都是O(nlogn),适合大规模的数据排序。
- 分治思想,顾名思义,就是分而治之,将一个大问题分解成小的子问题来解决。小的子问题解决了,大问题也就解决了。
- 分治算法一般都是用递归来实现的。分治是一种解决问题的处理思想,递归是一种编程技巧。
- 线性排序算法的速度很快,但是它们对要排序的数据的要求非常苛刻。所以一定要注意它们的使用场景。
1,冒泡排序
冒泡排序只会操作相邻的两个数据。
每次冒泡操作都会对相邻的两个元素进行比较,看是否满足大小关系要求,如果不满足就让他两互换。
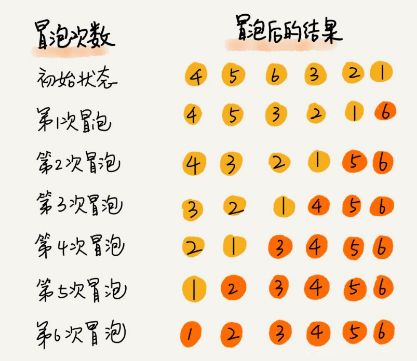
一次冒泡会让至少一个元素移动到它应该在的位置,重复 n 次,就完成了 n 个数据的排序。
例如对一组数据 [4,5,6,3,2,1] 进行一趟冒泡排序操作是这样的:

整个冒泡过程如下:
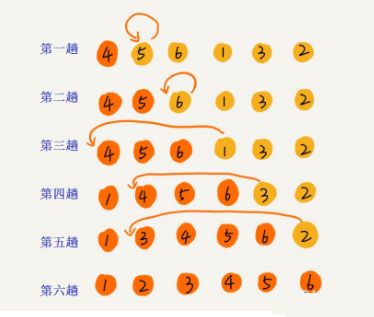
冒泡过程还可以优化。
- 当某次冒泡操作已经没有数据交换时,说明已经达到完全有序,不用再继续执行后续的冒泡操作。
下面的例子有6个元素,只需要4次就可以:

2,插入排序
一个本来有序的数组,在插入一个元素后,使其保持有序。这个过程就相当于插入排序算法的过程。

插入排序算法:
- 首先,将数组中的数据分为两个区,已排序区和未排序区。
- 初始已排序区只有一个元素,就是数组的第一个元素。
- 然后,取未排序区中的元素,在已排序区中找到合适的位置将其插入,并保证已排序区一直有序。
- 重复这个过程,直到未排序区中的元素为空
以数据 [4,5,6,1,3,2] 为例,其中左侧为已排序区间,右侧是未排序区间,其排序过程如下:
3,选择排序
选择排序也分为已排序区和未排序区,每次从未排序区中找到最小的元素,将其放到已排序区的末尾。

4,归并排序
归并排序是一个先分后合的过程。
如果要排序一个数组,我们先把数组从中间分成前后两部分,然后对前后两部分分别排序,再将排好序的两部分合并在一起,这样整个数组就都有序了。

两个有序数组的 merge 过程:
- 申请一个临时数组 tmp,大小与 A[p…r] 相同。
- 用两个游标 i 和 j,分别指向 A[p…q] 和 A[q+1…r] 的第一个元素。比较这两个元素 A[i] 和 A[j]:
- 如果 A[i] <= A[j],就把 A[i] 放入 tmp,且将 i 后移一位
- 如果 A[i] > A[j],就把 A[j] 放入 tmp,且将 j 后移一位
- 继续上述比较过程,直到其中一个子数组中的所有数据都放入 tmp 中,再把另一个数组中的数据依次放入 tmp 的末尾
- 这时,tmp 就是两个子数组合并之后的结果,最后将 tmp 中的数据拷贝到 A[p…r] 中

5,快速排序
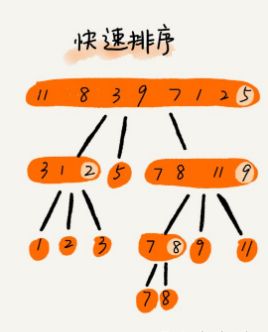
快排也是利用分治思想。
如果要排序数组中下标从 p 到 r 之间的数据,我们选择 p 到 r 之间的任意一个数据作为 pivot(分区点,一般选择区间中的最后一个),遍历 p 到 r 之间的数据:
- 将小于 pivot 的放到左边
- 将大于 pivot 的放到右边
- 将 pivot 放到中间
那么,p 到 r 之间的数据被分成了三个部分:
- p 到 q-1 之间的都小于 pivot
- 中间是 pivot
- q+1 到 r 之间的都大于 pivot

根据分治、递归思想,可以用递归排序下标从 p 到 p-1 之间的数据和 q+1 到 r 之间的数据,直到区间缩小到 1。
6,通用排序算法
如何实现一个通用的排序算法?
- 线性排序算法虽然时间复杂度低,但其对原数据的要求较高,使用场景较特殊。所以,它不适合用来实现一个通用的排序算法。
- 对于数据规模小的,可以使用 O(n^2) 的排序算法。
- 对于数据量较大的,一般会使用O(nlogn) 算法,所以为了兼顾数据规模一般会选用O(nlogn) 算法。
- O(nlogn) 算法中有归并排序,快速排序,推排序。因为归并排序需要额外的空间,所以归并排序的使用并不多。
- Java 语言的排序使用推排序实现,C 语言的排序使用快速排序实现。
4,查找算法
| 查找算法 | 时间复杂度 | 空间复杂度 |
|---|---|---|
| 有序链表 | O(n) | O(1) |
| 二分查找 | O(logn) | O(1) |
| 跳表 | O(logn) | O(n) |
| 哈希表 | O(1) | |
| 二叉查找树 | O(logn) | |
| 红黑树 | O(logn) | |
| 最大/最小堆 | O(logn) | O(1) |
| 图的广度优先搜索 | O(V+E) | O(v) |
| 图的深度优先搜索 |
V是顶点的个数,E是边的个数
几种常见的复杂度量级
- 常量阶
O(1) - 对数阶
O(logn),线性阶O(n),线性对数阶O(nlogn) - 平方阶
O(n^2),立方阶O(n^3),K 方阶O(n^k) - 指数阶
O(2^n),阶乘阶O(n!)
1,二分查找
二分查找,针对的是一个有序的数据集,每次都通过跟区间的中间元素对比,将待查找的区间缩小为之前的一半,直到找到要查找的元素,或者区间被缩小为 0。
例子:在 [8,11,19,23,27,33,45,55,67,98] 中查找数字19。

二分查找应用场景的局限性
- 二分查找只使用数组结构,而不能是链表
- 因为数组查找中间元素的时间复杂度是O(1)
- 而链表查找中间元素的时间复杂度是O(n),时间成本会大大增加
- 二分查找只能使用有序数据
- 如果是无序的数据,需要先排序。排序的时间复杂度是O(nlogn)
- 所以,如果我们针对的是一组静态的数据,没有频繁地插入、删除,我们可以进行一次排序,多次二分查找。这样排序的成本可被均摊,二分查找的边际成本就会比较低
- 如果数据的插入,删除比较频繁,要想使用二分查找,就需要维护一个有序的数组,这样的成本是比较高的。对于动态的数据集合,为了快速查找,二叉树是更好的选择
- 数据量太小时不太适合二分查找,这时普通的顺序查找也行
- 数据量太大是也不适合,因为二分查找需要一个数组结构,而数组结构要求连续的内存空间
- 如果数据有1G,那寻找一个连续的1G 的内存空间是一个比较苛刻的条件
2,跳表
之前讲的二分查找都是基于数组结构,如果数据存储在链表中,而非数组中,需要对链表稍加改造,就可以支持二分查找。这种改造后的数据结构就是跳表。
跳表基于有序链表(可以很好的支持范围查找),是一种各个方面都比较优秀的动态数据结构,可以支持快速的插入,删除,查找操作,实现起来也不复杂,甚至可以替代红黑树。
对于有序的单链表来说,查找一个元素只能从头到尾挨个查找,时间复杂度是O(n)。

为了使链表支持更快的查找,可以为链表建立“索引”,每两个节点向上一级抽取一个节点,这一级称为索引层。索引层使用down 指针指向原始链表。
当查找一个节点的时候,先从索引层查找,再到原始链表查找,这样可以提高速度。

如果再向上抽取一层,如下:

当数据量比较大的时候,跳表可以明显的提高单链表的查找速度。
3,哈希表
哈希表是数组的一种扩展,依赖数组下标的随机访问,没有数组就没有哈希表。
哈希表用的就是数组支持按照下标随机访问的时候,时间复杂度是 O(1) 的特性。
哈希函数
哈希函数设计的基本要求:
- 散列函数计算得到的散列值是一个非负整数
- 如果 key1 = key2,那 hash(key1) = hash(key2)
- 如果 key1 ≠ key2,那 hash(key1) ≠ hash(key2)
对于第3个要求,实际上是不可能实现的。即便像业界著名的MD5、SHA、CRC等哈希算法,也无法完全避免这种散列冲突。另外数组的存储空间有限,也会大大增加哈希冲突的可能性。
哈希算法
将任意长度的二进制值串映射为固定长度的二进制值串,这个映射的规则就是哈希算法,而通过原始数据映射之后得到的二进值串就是哈希值。
哈希算法满足的四点要求:
- 从哈希值不能反向推导出原始数据
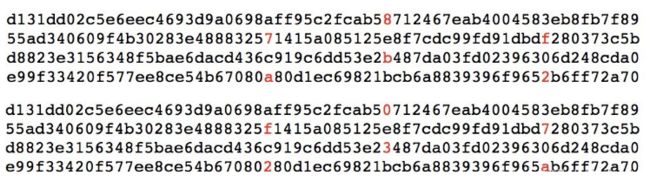
- 对数据非常敏感,即使原始数据只修改了一个 Bit,得到的哈希值也不同
- 哈希冲突的概率要很小
- 哈希算法的执行效率要高效
MD5 算法就是一种哈希算法,哈希值是固定的128位二进制串,也就是32位字符串。其最多能表示 2^128 个数据。
// 当多于这个数的时候,md5 值就会发生冲突,已经是天文数字了
2^128 = 340282366920938463463374607431768211456
下面两个串的哈希值就是相同的:
装载因子
-
装载因子 = 填入表中的元素个数 / 散列表的长度
-
装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降
-
当装载因子过大时,就需要对哈希表进行动态扩容
- 假如新申请的空间是之前的两倍,那么扩容后的装载因子就会比之前缩小两倍。
- 哈希表的扩容,会将数据从老表迁移到新表,因为表的大小变了,所以数据的位置也会变。
-
当动态因子过小时,为避免空间浪费,也可以缩容
解决哈希冲突的办法
-
开放寻址法:如果发生冲突,就再找一个空闲位置,比如:
- 线性探测:每次将下标
+1,+2,+3,+4,+5 ...。即从当前位置依次往后查找,实际上问题比较大。 - 二重探测:每次将下标
+1^2,+2^2,+3^2 ...。都是加平方。 - 双重探测

- 适合数据量比较小的场景
- 线性探测:每次将下标
-
链表法:比较常用,每个桶都对应一个链表
- 链表法可以使用跳表或红黑树,来使得效率更高

Java 中 LinkedHashMap 就采用了链表法解决冲突,ThreadLocalMap 是通过线性探测的开放寻址法来解决冲突。
工业级哈希表(Java HashMap)分析
- 初始大小默认值是16,可以设置。
- 最大装载因子默认是 0.75,当表中元素大于 0.75*capacity 时,会扩容为原来的2倍
- 在JDK1.8 中,当链表的长度超过 8 时,链表会转化为红黑树,当长度低于 8 时,又会转回链表
- 哈希函数,简单高效,分布平均
4,二叉查找树
什么是树形结构

- A 节点是 B 节点的父节点
- B 节点是 A 节点的子节点
- B、C、D 互为兄弟节点
- 没有父节点的节点为根节点(E 节点)
- 没有子节点的节点为叶节点(G)
几个概念:
- 节点的高度:节点到叶节点的最长路径(边数)
- 节点的深度:根节点到这个节点的边的个数
- 节点的层数:节点的深度 + 1
- 数的高度:根节点的高度

二叉树
- 二叉树:每个节点最多有两个子节点,分别是左子节点和右子节点
- 二叉树并不要求每个节点都有两个子节点,有的节点只有左子节点,有的节点只有右子节点
- 满二叉树:叶子节点全都在最底层,除了叶子节点之外,每个节点都有左右两个子节点
- 完全二叉树:叶子节点都在最底下两层,最后一层的叶子节点都靠左排列,除了最后一层,其他层的节点个数都要达到最大

二叉树的存储方法
- 链式存储法
- 数组存储法

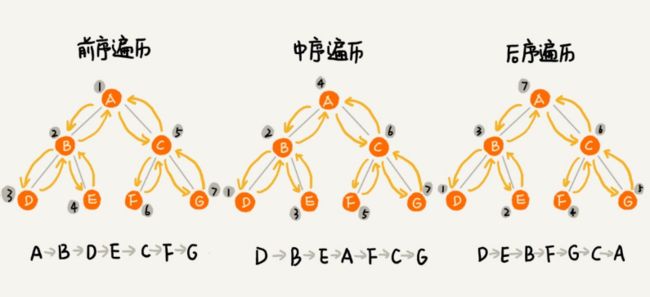
二叉树的遍历
二叉树遍历的时间复杂度是 O(n)。
- 前序遍历(根节点在前):根节点->左子树->右子树
- 中序遍历(根节点在中):左子树->根节点->右子树
- 中序遍历时,输出的是顺序序列。所以二叉树又叫二叉排序树。
- 后续遍历(根节点在后):左子树->右子树->根节点
伪代码如下:
// 前序遍历
void preOrder(Node* root) {
if (root == null) return;
print root // 此处为伪代码,表示打印 root 节点
preOrder(root->left);
preOrder(root->right);
}
// 中序遍历
void inOrder(Node* root) {
if (root == null) return;
inOrder(root->left);
print root // 此处为伪代码,表示打印 root 节点
inOrder(root->right);
}
// 后续遍历
void postOrder(Node* root) {
if (root == null) return;
postOrder(root->left);
postOrder(root->right);
print root // 此处为伪代码,表示打印 root 节点
}
二叉查找树
二叉查找树最大的特点就是,支持动态数据集合的快速插入、删除、查找操作。对于任意一个节点:
- 其左子树中的每个节点的值,都要小于这个节点的值
- 而右子树节点的值都大于这个节点的值
二叉查找树的查找过程:

5,红黑树
平衡二叉树
二叉查找树在极端情况下,时间复杂度会退化到O(n),所以出现了平衡二叉树。
- 平衡二叉树中任意一个节点的左右子树的高度相差不能大于1。
- 完全二叉树、满二叉树其实都是平衡二叉树,非完全二叉树也有可能是平衡二叉树。
- AVL 树是一种高度平衡的二叉树,红黑树并不是严格意义上的平衡树。

红黑树

红黑树是一颗二叉搜索树,它在每个节点上增加了一个存储位来表示节点的颜色,可以是黑或红。
通过对任何一条从根到叶子的简单路径上各个节点的颜色进行约束,红黑树确保没有一条路径会比其他路径长出 2 倍,因而是近似平衡。
树中每个节点包含 5 个属性:color,key,left,right,p。
红黑树的定义:
- 红黑树中的每个节点都有颜色,红色或黑色
- 根节点是黑色
- 每个叶子节点是黑色的空节点(NIL),叶节点不存储数据
- 任何相邻的节点不能同时为红色(可同时为黑色),红色节点是被黑色节点隔开的
- 每个节点,从该节点到其所有后代叶节点的路径,都包含相同数目的黑色节点
红黑树的优点:
- 红黑树避免了极端情况下性能退化的问题,因为它是一颗近似平衡的树。
- 红黑树不像 AVL 树那样是严格的平衡树,避免了插入,删除操作时对树进行过多的平衡操作。
- 综合来说,红黑树的各项性能都是比较优越的,也是比较稳定的。
6,堆
什么是堆 ?
- 堆是一棵完全二叉树:除了最后一层,其它层的节点个数都是满的,最后一层的节点都靠左排列
- 堆中的每个节点的值都必须大于等于(或小于等于)其子树中每个节点的值
- 大顶堆:堆中的每个节点的值都大于等于其子树中每个节点的值
- 小顶堆:堆中的每个节点的值都小于等于其子树中每个节点的值

用数组存储堆
堆可以用数组来实现。

注:文中图片引自《数据结构与算法》