【玩转yolov5】之anchor匹配策略(build_targets)分析(1)
这里我们实际推演一下yolov5训练过程中的anchor匹配策略,为了简化数据和便于理解,设定以下训练参数。
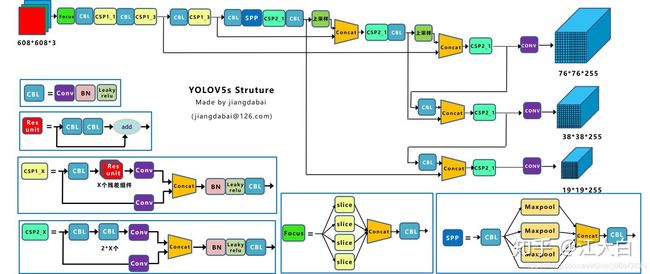
- 输入分辨率(img-size):608x608
- 分类数(num_classes):2
- batchsize:1
- 网络结构如下图所示:
def build_targets(pred, targets, model):
"""
pred:
type(pred) :
"""
#p:predict,targets:gt
# Build targets for compute_loss(), input targets(image,class,x,y,w,h)
det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module 输入参数pred为网络的预测输出,它是一个list包含三个检测头的输出tensor。
(Pdb) print(type(pred))
(Pdb) print(len(pred))
3
(Pdb) print(pred[0].shape)
torch.Size([1, 3, 76, 76, 7]) #1:batch-size,3:该层anchor的数量,7:位置(4),obj(1),分类(2)
(Pdb) print(pred[1].shape)
torch.Size([1, 3, 38, 38, 7])
(Pdb) print(pred[2].shape)
torch.Size([1, 3, 19, 19, 7])
targets为标签信息(gt),我这里只有一张图片,包含14个gt框,且类别id为0,在我自己的训练集里面类别0表示行人。其中第1列为图片在当前batch的id号,第2列为类别id,后面依次是归一化了的gt框的x,y,w,h坐标。
(Pdb) print(targets.shape)
torch.Size([14, 6])
(Pdb) print(targets)
tensor([[0.00000, 0.00000, 0.56899, 0.42326, 0.46638, 0.60944],
[0.00000, 0.00000, 0.27361, 0.59615, 0.02720, 0.02479],
[0.00000, 0.00000, 0.10139, 0.59295, 0.04401, 0.03425],
[0.00000, 0.00000, 0.03831, 0.59863, 0.06223, 0.02805],
[0.00000, 0.00000, 0.04395, 0.57031, 0.02176, 0.06153],
[0.00000, 0.00000, 0.13498, 0.57074, 0.01102, 0.03152],
[0.00000, 0.00000, 0.25948, 0.59213, 0.01772, 0.03131],
[0.00000, 0.00000, 0.29733, 0.63080, 0.07516, 0.02536],
[0.00000, 0.00000, 0.16594, 0.57749, 0.33188, 0.13282],
[0.00000, 0.00000, 0.79662, 0.89971, 0.40677, 0.20058],
[0.00000, 0.00000, 0.14473, 0.96773, 0.01969, 0.03341],
[0.00000, 0.00000, 0.10170, 0.96792, 0.01562, 0.03481],
[0.00000, 0.00000, 0.27727, 0.95932, 0.03071, 0.07851],
[0.00000, 0.00000, 0.18102, 0.98325, 0.00749, 0.01072]])
model自然就是表示的模型,det是模型的检测头,从该对象中可以拿到anchor数量(na)以及尺寸,检测头数量(nl)等信息。
na, nt = det.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch = [], [], [], []
gain = torch.ones(7, device=targets.device) # normalized to gridspace gain
ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) 这里的骚操作还挺多,pytorch不熟练的话only look once还真看不明白,我稍微拆解一下。
(Pdb) na,nt,gain
(3, 14, tensor([1., 1., 1., 1., 1., 1., 1.]))
(Pdb) torch.arange(na).float().view(na,1)
tensor([[0.],
[1.],
[2.]])
(Pdb) torch.arange(na).float().view(na,1).repeat(1,nt) #第二个维度复制nt遍
tensor([[0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
[1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.],
[2., 2., 2., 2., 2., 2., 2., 2., 2., 2., 2., 2., 2., 2.]])
(Pdb) targets.shape
torch.Size([14, 6])
(Pdb) targets.repeat(na,1,1).shape #targets原本只有两维,该repeat操作过后会增加一维。
torch.Size([3, 14, 6])
(Pdb) ai[:,:,None].shape #原本两维的ai也会增加一维
torch.Size([3, 14, 1])
(Pdb) torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2).shape #两个3维的tensort在第2维上concat
torch.Size([3, 14, 7])
(Pdb) torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2)
tensor([[[0.00000, 0.00000, 0.56899, 0.42326, 0.46638, 0.60944, 0.00000],
[0.00000, 0.00000, 0.27361, 0.59615, 0.02720, 0.02479, 0.00000],
[0.00000, 0.00000, 0.10139, 0.59295, 0.04401, 0.03425, 0.00000],
......],
[[0.00000, 0.00000, 0.56899, 0.42326, 0.46638, 0.60944, 1.00000],
[0.00000, 0.00000, 0.27361, 0.59615, 0.02720, 0.02479, 1.00000],
......],
[[0.00000, 0.00000, 0.56899, 0.42326, 0.46638, 0.60944, 2.00000],
[0.00000, 0.00000, 0.27361, 0.59615, 0.02720, 0.02479, 2.00000],
......]])
g = 0.5 # bias
off = torch.tensor([[0, 0],
[1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
], device=targets.device).float() * g # offsetsoff是偏置矩阵。
(Pdb) print(off)
tensor([[ 0.00000, 0.00000],
[ 0.50000, 0.00000],
[ 0.00000, 0.50000],
[-0.50000, 0.00000],
[ 0.00000, -0.50000]])
for i in range(det.nl): #nl=>3
anchors = det.anchors[i] #shape=>[3,3,2]
gain[2:6] = torch.tensor(pred[i].shape)[[3, 2, 3, 2]]
# Match targets to anchors
t = targets * gaindet.nl为预测层也就是检测头的数量,anchor匹配需要逐层进行。不同的预测层其特征图的尺寸不一样,而targets是相对于输入分辨率的宽和高作了归一化,targets*gain通过将归一化的box乘以特征图尺度从而将box坐标投影到特征图上。
(Pdb) pred[0].shape
torch.Size([1, 3, 76, 76, 7]) #1,3,h,w,7
(Pdb) torch.tensor(pred[0].shape)[[3,2,3,2]]
tensor([76, 76, 76, 76])
if nt:
# Matches
r = t[:, :, 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1. / r).max(2)[0] < model.hyp['anchor_t'] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filteryolov5抛弃了MaxIOU匹配规则而采用shape匹配规则,计算标签box和当前层的anchors的宽高比,即:wb/wa,hb/ha。如果宽高比大于设定的阈值说明该box没有合适的anchor,在该预测层之间将这些box当背景过滤掉(是个狠人!)。
(Pdb) torch.max(r,1./r).shape
torch.Size([3, 14, 2])
(Pdb) torch.max(r,1./r).max(2) #返回两组值,values和indices
torch.return_types.max(
values=tensor([[28.50301, 1.65375, 2.67556, 3.78370, 2.87777, 1.49309, 1.46451, 4.56943, 20.17829, 24.73137, 1.56263, 1.62791, 3.67186, 2.19651],
[17.72234, 1.99010, 1.67222, 2.36481, 1.24703, 2.38895, 1.57575, 2.85589, 12.61143, 15.45711, 1.47680, 1.68486, 1.59114, 4.60130],
[16.11040, 1.99547, 1.23339, 1.34871, 2.49381, 4.92720, 3.06377, 1.49178, 6.11463, 7.49436, 2.75656, 3.47502, 2.07540, 7.24849]]),
indices=tensor([[1, 0, 0, 0, 1, 0, 1, 0, 0, 0, 1, 1, 1, 0],
[0, 1, 0, 0, 1, 0, 1, 0, 0, 0, 1, 0, 1, 1],
[1, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0]]))
(Pdb) torch.max(r,1./r).max(2)[0] < model.hyp['anchor_t']
tensor([[False, True, True, True, True, True, True, False, False, False, True, True, True, True],
[False, True, True, True, True, True, True, True, False, False, True, True, True, False],
[False, True, True, True, True, False, True, True, False, False, True, True, True, False]])
(Pdb) print(j.shape)
torch.Size([3, 14])
(Pdb) print(t.shape)
torch.Size([3, 14, 7])
(Pdb) t[j].shape
torch.Size([29, 7])
(Pdb) t[j]
tensor([[ 0.00000, 0.00000, 20.79421, 45.30740, 2.06718, 1.88433, 0.00000],
[ 0.00000, 0.00000, 7.70598, 45.06429, 3.34444, 2.60274, 0.00000],
[ 0.00000, 0.00000, 2.91188, 45.49583, 4.72962, 2.13167, 0.00000],
[ 0.00000, 0.00000, 3.34012, 43.34355, 1.65410, 4.67637, 0.00000],
[ 0.00000, 0.00000, 10.25882, 43.37595, 0.83719, 2.39581, 0.00000],
[ 0.00000, 0.00000, 19.72059, 45.00159, 1.34638, 2.37982, 0.00000],
[ 0.00000, 0.00000, 10.99985, 73.54744, 1.49643, 2.53927, 0.00000],
[ 0.00000, 0.00000, 7.72917, 73.56174, 1.18704, 2.64536, 0.00000],
[ 0.00000, 0.00000, 21.07247, 72.90799, 2.33363, 5.96677, 0.00000],
[ 0.00000, 0.00000, 13.75753, 74.72697, 0.56908, 0.81499, 0.00000],
[ 0.00000, 0.00000, 20.79421, 45.30740, 2.06718, 1.88433, 1.00000],
[ 0.00000, 0.00000, 7.70598, 45.06429, 3.34444, 2.60274, 1.00000],
[ 0.00000, 0.00000, 2.91188, 45.49583, 4.72962, 2.13167, 1.00000],
[ 0.00000, 0.00000, 3.34012, 43.34355, 1.65410, 4.67637, 1.00000],
[ 0.00000, 0.00000, 10.25882, 43.37595, 0.83719, 2.39581, 1.00000],
[ 0.00000, 0.00000, 19.72059, 45.00159, 1.34638, 2.37982, 1.00000],
[ 0.00000, 0.00000, 22.59712, 47.94083, 5.71178, 1.92723, 1.00000],
[ 0.00000, 0.00000, 10.99985, 73.54744, 1.49643, 2.53927, 1.00000],
[ 0.00000, 0.00000, 7.72917, 73.56174, 1.18704, 2.64536, 1.00000],
[ 0.00000, 0.00000, 21.07247, 72.90799, 2.33363, 5.96677, 1.00000],
[ 0.00000, 0.00000, 20.79421, 45.30740, 2.06718, 1.88433, 2.00000],
[ 0.00000, 0.00000, 7.70598, 45.06429, 3.34444, 2.60274, 2.00000],
[ 0.00000, 0.00000, 2.91188, 45.49583, 4.72962, 2.13167, 2.00000],
[ 0.00000, 0.00000, 3.34012, 43.34355, 1.65410, 4.67637, 2.00000],
[ 0.00000, 0.00000, 19.72059, 45.00159, 1.34638, 2.37982, 2.00000],
[ 0.00000, 0.00000, 22.59712, 47.94083, 5.71178, 1.92723, 2.00000],
[ 0.00000, 0.00000, 10.99985, 73.54744, 1.49643, 2.53927, 2.00000],
[ 0.00000, 0.00000, 7.72917, 73.56174, 1.18704, 2.64536, 2.00000],
[ 0.00000, 0.00000, 21.07247, 72.90799, 2.33363, 5.96677, 2.00000]])
按照该匹配策略,一个gt box可能同时匹配上多个anchor。