改进YOLOv5系列:8.增加ACmix结构的修改,自注意力和卷积集成
YOLOAir:助力YOLO论文改进 、 不同数据集改进、创新点改进
- YOLOAir项目:基于 YOLOv5 代码框架,结合不同模块来构建不同的YOLO目标检测模型。
- 本项目包含大量的改进方式,降低改进难度,改进点包含
Backbone、Neck、Head、注意力机制、IoU损失函数、NMS、Loss计算方式、自注意力机制、数据增强部分、激活函数等部分,详情可以关注 YOLOAir 的说明文档。 - 同时
附带各种改进点原理及对应的代码改进方式教程,用户可根据自身情况快速排列组合,在不同的数据集上实验, 应用组合写论文, 创造自己的毕业项目!
新的仓库链接:YOLOAir仓库:https://github.com/iscyy/yoloair
可以 fork 和 star,持续同步更新完善
本篇是《ACmix结构自注意力和卷积集成》的修改 演示
使用YOLOv5网络作为示范,可以无缝加入到 YOLOv7、YOLOX、YOLOR、YOLOv4、Scaled_YOLOv4、YOLOv3等一系列YOLO算法模块
文章目录
-
- YOLOAir:助力YOLO论文改进 、 不同数据集改进、创新点改进
- ACmix结构理论部分
- yolov5的yaml配置文件修改
- common.py配置
- yolo.py配置修改
-
- 提示
- 训练yolov5s_acmix.yaml模型
- 基于以上yolov5s_acmix.yaml文件继续修改
ACmix结构理论部分
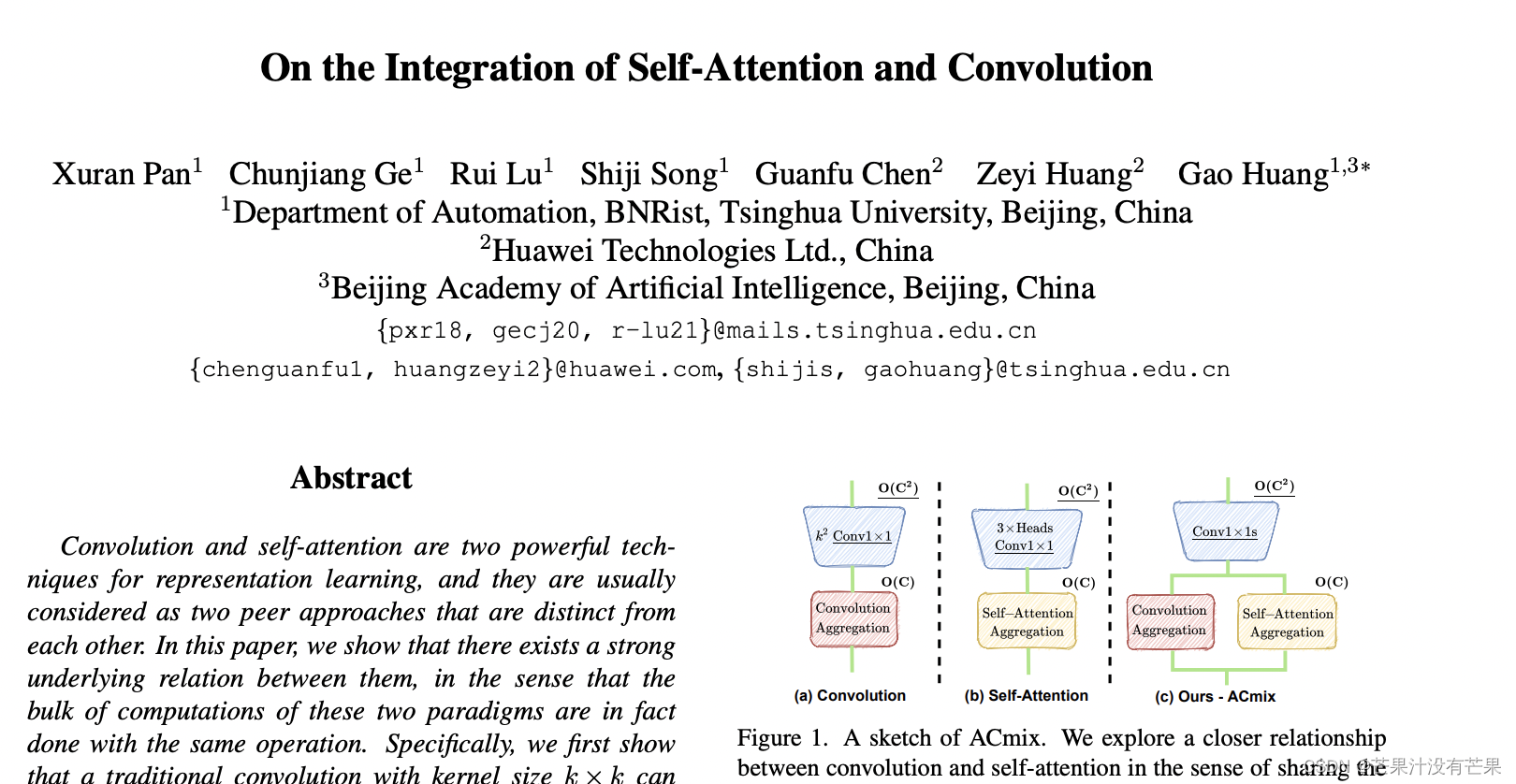
论文:On the Integration of Self-Attention and Convolution
论文地址:https://arxiv.org/pdf/2111.14556.pdf
yolov5的yaml配置文件修改
增加以下yolov5s_acmix.yaml文件
# parameters
nc: 10 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchors
anchors:
#- [5,6, 7,9, 12,10] # P2/4
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, ACmix, [512, 512]], #9 修改示例
[-1, 1, SPPF, [1024,5]], #10
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 14
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 18 (P3/8-small)
[-1, 1, CBAM, [256]], #19
[-1, 1, Conv, [256, 3, 2]],
[[-1, 15], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 22 (P4/16-medium) [256, 256, 1, False]
[-1, 1, CBAM, [512]],
[-1, 1, Conv, [512, 3, 2]], #[256, 256, 3, 2]
[[-1, 11], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 25 (P5/32-large) [512, 512, 1, False]
[-1, 1, CBAM, [1024]],
[[19, 23, 27], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
common.py配置
./models/common.py文件增加以下模块
def position(H, W, is_cuda=True):
if is_cuda:
loc_w = torch.linspace(-1.0, 1.0, W).cuda().unsqueeze(0).repeat(H, 1)
loc_h = torch.linspace(-1.0, 1.0, H).cuda().unsqueeze(1).repeat(1, W)
else:
loc_w = torch.linspace(-1.0, 1.0, W).unsqueeze(0).repeat(H, 1)
loc_h = torch.linspace(-1.0, 1.0, H).unsqueeze(1).repeat(1, W)
loc = torch.cat([loc_w.unsqueeze(0), loc_h.unsqueeze(0)], 0).unsqueeze(0)
return loc
def stride(x, stride):
b, c, h, w = x.shape
return x[:, :, ::stride, ::stride]
def init_rate_half(tensor):
if tensor is not None:
tensor.data.fill_(0.5)
def init_rate_0(tensor):
if tensor is not None:
tensor.data.fill_(0.)
class ACmix(nn.Module):
def __init__(self, in_planes, out_planes, kernel_att=7, head=4, kernel_conv=3, stride=1, dilation=1):
super(ACmix, self).__init__()
self.in_planes = in_planes
self.out_planes = out_planes
self.head = head
self.kernel_att = kernel_att
self.kernel_conv = kernel_conv
self.stride = stride
self.dilation = dilation
self.rate1 = torch.nn.Parameter(torch.Tensor(1))
self.rate2 = torch.nn.Parameter(torch.Tensor(1))
self.head_dim = self.out_planes // self.head
self.conv1 = nn.Conv2d(in_planes, out_planes, kernel_size=1)
self.conv2 = nn.Conv2d(in_planes, out_planes, kernel_size=1)
self.conv3 = nn.Conv2d(in_planes, out_planes, kernel_size=1)
self.conv_p = nn.Conv2d(2, self.head_dim, kernel_size=1)
self.padding_att = (self.dilation * (self.kernel_att - 1) + 1) // 2
self.pad_att = torch.nn.ReflectionPad2d(self.padding_att)
self.unfold = nn.Unfold(kernel_size=self.kernel_att, padding=0, stride=self.stride)
self.softmax = torch.nn.Softmax(dim=1)
self.fc = nn.Conv2d(3*self.head, self.kernel_conv * self.kernel_conv, kernel_size=1, bias=False)
self.dep_conv = nn.Conv2d(self.kernel_conv * self.kernel_conv * self.head_dim, out_planes, kernel_size=self.kernel_conv, bias=True, groups=self.head_dim, padding=1, stride=stride)
self.reset_parameters()
def reset_parameters(self):
init_rate_half(self.rate1)
init_rate_half(self.rate2)
kernel = torch.zeros(self.kernel_conv * self.kernel_conv, self.kernel_conv, self.kernel_conv)
for i in range(self.kernel_conv * self.kernel_conv):
kernel[i, i//self.kernel_conv, i%self.kernel_conv] = 1.
kernel = kernel.squeeze(0).repeat(self.out_planes, 1, 1, 1)
self.dep_conv.weight = nn.Parameter(data=kernel, requires_grad=True)
self.dep_conv.bias = init_rate_0(self.dep_conv.bias)
def forward(self, x):
q, k, v = self.conv1(x), self.conv2(x), self.conv3(x)
scaling = float(self.head_dim) ** -0.5
b, c, h, w = q.shape
h_out, w_out = h//self.stride, w//self.stride
# ### att
# ## positional encoding
pe = self.conv_p(position(h, w, x.is_cuda))
q_att = q.view(b*self.head, self.head_dim, h, w) * scaling
k_att = k.view(b*self.head, self.head_dim, h, w)
v_att = v.view(b*self.head, self.head_dim, h, w)
if self.stride > 1:
q_att = stride(q_att, self.stride)
q_pe = stride(pe, self.stride)
else:
q_pe = pe
unfold_k = self.unfold(self.pad_att(k_att)).view(b*self.head, self.head_dim, self.kernel_att*self.kernel_att, h_out, w_out) # b*head, head_dim, k_att^2, h_out, w_out
unfold_rpe = self.unfold(self.pad_att(pe)).view(1, self.head_dim, self.kernel_att*self.kernel_att, h_out, w_out) # 1, head_dim, k_att^2, h_out, w_out
att = (q_att.unsqueeze(2)*(unfold_k + q_pe.unsqueeze(2) - unfold_rpe)).sum(1) # (b*head, head_dim, 1, h_out, w_out) * (b*head, head_dim, k_att^2, h_out, w_out) -> (b*head, k_att^2, h_out, w_out)
att = self.softmax(att)
out_att = self.unfold(self.pad_att(v_att)).view(b*self.head, self.head_dim, self.kernel_att*self.kernel_att, h_out, w_out)
out_att = (att.unsqueeze(1) * out_att).sum(2).view(b, self.out_planes, h_out, w_out)
## conv
f_all = self.fc(torch.cat([q.view(b, self.head, self.head_dim, h*w), k.view(b, self.head, self.head_dim, h*w), v.view(b, self.head, self.head_dim, h*w)], 1))
f_conv = f_all.permute(0, 2, 1, 3).reshape(x.shape[0], -1, x.shape[-2], x.shape[-1])
out_conv = self.dep_conv(f_conv)
return self.rate1 * out_att + self.rate2 * out_conv
自行插入其他层 换通道的时候,注意匹配上通道
yolo.py配置修改
不需要
提示
出现RuntimeError: Input type (torch.cuda.FloatTensor) and weight type (torch.cuda.HalfTensor) should be the same
解决办法:
1.train加个参数
parser.add_argument('--acmix', action='store_true', help='useacmix')
2.val.run调用的时候加个(half=not opt.acmix)传进去,因为val.py默认的half为True,要将其设置为false。
或者每次跑包含acmix模块的网络,直接将val.py的half参数改成false
训练yolov5s_acmix.yaml模型
python train.py --cfg yolov5s_acmix.yaml --acmix
基于以上yolov5s_acmix.yaml文件继续修改
关于yolov5s_acmix.yaml文件配置中的acmix模块,可以针对不同数据集自行再进行模块修改,原理一致