全面讨论泛化 (generalization) 和正则化 (regularization)

来源:PaperWeekly
本文约8400字,建议阅读15分钟
本文和大家全面讨论机器学习和深度学习中的泛化和正则化。模型泛化能力,是设计和评估一个机器学习 or 深度学习方法时无比重要的维度,所以我想通过一系列文章,与大家全面地讨论机器学习和深度学习中的泛化(generalization)/正则化(regularization),一方面从多角度理解模型的泛化问题,另一方面,从泛化角度来解释机器学习和深度学习中的很多方法(norm panalty, weight decay, dropout, parameter sharing等许多)。
这里的大部分内容基于 Ian Goodfellow 的《Deep Learning》一书第七章“Regularization for Deep Learning”(墙裂推荐!),并结合一些其他文章和我自己的经验。
这个系列的主要内容有:
引子
1. 定义:正则化(regularization)是所有用来降低算法泛化误差(generalization error)的方法的总称。
2. 正则化的手段多种多样,是以提升 bias 为代价降低 variance。
3. 现实中效果最好的深度学习模型,往往是【复杂的模型(大且深)】+【有效的正则化】。
目录:正则化方法(Regularizer)
1. Norm penalty:常用 L1/L2 regularization,理论机制不同,按特征方向重要性,L1 以阈值“削砍”参数分量,L2 “缩水”参数分量;深度学习中的实现方式有【weight decay】和【硬约束(重投影)】两种,各有不足。
2. L2-regularization 的特殊作用:解决【欠定问题】,调整协方差矩阵(covariance matrix)使其可逆。
3. Dropout layer 与 batchnorm layer:dropout 本质是一种 ensemble method;dropout 与 batchnorm 用于 regression 时有弊端;同时使用时理论上有冲突。
4. 深度学习的 Early stopping:减少 overfit 之后无意义的训练。
1.引子(可以速读或略过哦)
定义:正则化(regularization)是所有用来降低算法泛化误差(generalization error)的方法的总称。
在机器学习中,为了让模型不局限于训练集上,我们通常采用很多手段来降低测试集误差(test error),或者说泛化误差(generalization error),未见过的新样本,我们也希望模型能表现良好。这些手段和方法又往往是以训练误差(training error)升高为代价的。所有用来降低泛化误差的手段和方法统称为正则化(regularization);单独一种手段,可以称之为一个 regularizer。
手段多样,是以提升 bias 为代价降低 variance。
正则化的手段和方法多种多样,常见的比如给模型添加约束、给目标函数加惩罚项(其实是一种软约束)、模型集成(ensemble method)等等。采用约束或惩罚的手段,所起的作用可以是:融入先验(prior knowledge)、使模型变简单、把欠定问题转化成正定/超定问题(比如样本数量低于特征维度时,linear regression 无法使用,需要 ridge regression 才能有解)等等。
在深度学习中,对模型添加正则化,是以提升偏差(bias)为代价降低方差(variance)。一个有效的 regularizer,就是要很好地折中平衡 bias 和 variance,使 variance 大幅降低,而又不过度增加 bias。
现实中,效果最好的深度学习模型往往是【复杂的模型(大且深)】+【有效的正则化】。
现实的深度学习任务,比如处理图像、音频、文本,往往本身就是复杂的,因此我们设计复杂的神经网络结构,提供足够的模型容量(model capacity),才有可能描述输入-输出之间的复杂映射。神经网络中的参数取不同的值对应不同的模型,这些所有可能的模型构成了一个模型集(model class),大多数情况下,即使我们用复杂的结构,真实的映射也不在我们所选择的这个 model class 中。
然而,我们却又只有有限的数据,用有限的数据训练一个模型,即使真实的映射在 model class 中,我们一定能找到吗?不一定!因为训练使用的损失函数(loss)是经验损失(emperical loss,在训练样本上计算损失),并非真实损失(所有可能样本的损失),最终找到的模型只是在训练集上损失小。因此,我们不能放任样本过于复杂、只拟合训练数据,所以需要正则化。
下面就来逐一讨论不同的 regularizer 吧!
2.Norm Penalty,及其深度学习中的实现方式
假设模型输入为 ,输出为 ,参数为 ,在训练模型的过程中,解决优化问题 来求解参数 。Norm penalty 就是在原本的目标函数上,添加一个基于参数 norm 的惩罚项 ,新优化问题变成了:
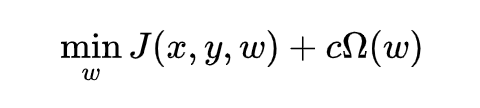
是个超参数,用来调整惩罚的力度, 相当于没有 regularization, 增加代表强化 regularization,实际使用过程中往往通过交叉验证来调整。 理论上是基于 L-p norm(任意 p)的函数,但常用的是 L1 和 L2-norm。
L1-regularization:基于 L1-norm 的惩罚项(向量 L1-norm 定义:),添加在回归模型也叫LASSO,优化问题变成了 ,能起到增强 稀疏性(sparsity)的特殊效果,在需要稀疏特征提取(feature selection)的情况下非常重要。
比如物体识别,如果一只猫的图片,头有点像狐狸,身子有点像狗,我们希望输出 ,而不是 猫狐狸狗 。另外,稀疏性表示(sparse representation)本身是一类 regularization,除了基于 L1 penalty 的方法,还有很多方式,我们之后会讨论到。
L2-regularization:模型的优化问题变成了 ,它在几乎所有的 ML 模型都可以用,也真的太常用了。
L1-regularization 促进稀疏性,L2-regularization 能降低模型容量,减少 overfitting,这已经是耳熟能详的。但从理论上看,他们究竟起了什么作用、怎样起的作用呢?我们先谈 L2,再谈 L1。
2.1 从理论角度看L2-regularization的机制
模型:
从求解过程来看: ML 模型往往通过梯度下降法(gradient decent)来迭代更新参数,在第 k 个 iteration,更新公式为:, 是 learning rate。易见,L2-norm penalty 是通过在每一次迭代时以固定比例缩小、衰减参数,来避免复杂的模型。 基于此的实现手段称为 weight decay 我们稍后提到它的具体问题。
从最终解的结果来看: 添加 L2-regularization 后得到的解,相比于没有 regularization,究竟有什么区别?假设 为原优化问题的最优解,即 ,而 为加了 regularization 后的最优解,即 ,特征值分解提供了很好的视角。
首先我们对问题做一个简化,假设 为二次函数(quadratic function),如果它不是,那我们就在 周围对 做 quadratic 近似, 可以表达为 ,这里的 H 是 Hessian 矩阵。我们知道, 的最优解是一阶导 = 0 的解,也就有 ,也就有 。
我们得到了 与 之间的变换关系,答案即将揭晓了!让我们做个特征值分解 ,得到 ,答案来了: 在 H 特征向量的方向上进行了缩放 ! 具体地,在第 个方向上的参数分量,以 的倍率缩小,显然,特征值越小的方向,也就是不重要的方向上,缩小的程度越严重!
总结一下就是,L2-regularization 使重要方向上(目标函数非常敏感的方向)参数分量获得保存,在不重要的方向上得到衰减减,来实现精简参数的效果!
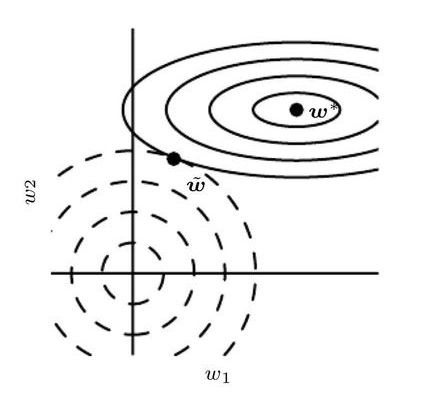
▲ L2-regularization 的工作机理:在不重要的方向上(图中横向:特征值小,目标函数不敏感)大幅衰减参数,在重要的方向上(图中纵向,特征值大,目标函数敏感)小幅衰减参数,最终实现降低模型复杂度的作用
2.2 从理论角度看L1-regularization的机制
模型:
从求解过程来看: 由于 L1-norm 在 处不可导,我们无法使用梯度,而需要次梯度(subgradient)。在第 k 个 iteration,更新公式为:, 是 learning rate。易见,相比于没有 regularization,L1-regularization 在更新时额外根据参数的符号来调整,如果参数为正,就减少一点,如果为负,就增加一点,这样就使得参数向 0 靠近。因此,L1-regularization 是通过在每一次迭代时,依据符号调整数值,使其趋近于 0。
从最终解的结果来看: 我们以一个进一步简化的情况来讨论,假设 Hessian 矩阵 是对角线矩阵,(实际可能不是,但我们这里只想看一个最简单直观的例子),并假设对角线上的每个值 (保证目标函数是凸函数),我们和之前一样,对加入了 L1-regularization 的目标函数做一个二次函数近似 ,可以推导得出,L1-regularization 的最优解满足 。
答案揭晓了!L1-regularization 使低于一定阈值的参数全部清 0,高于阈值的参数减少一部分,来精简参数并迫使参数稀疏!具体地,在第 个维度上,如果 ,参数被直接逼成 0,这就造成了稀疏性;反之如果大于这个阈值,这个维度上的参数值被减少一定量,但溢出阈值的那部分被保留下来。
2.3 实现方式:weight decay与reprojection
具体地在 ML 和 DL 中,norm penalty 一般有两种方式实现,各有优劣。
第一种,最常用的,是 weight decay,根据 gradient descent 时的 update rule,我们只需要在每一次迭代对参数做一点衰减,尤其对于 L2-regularization,参数只需乘一个缩放引子。关于 weight decay 的使用和优劣有一些值得注意的地方。
1. 不作用于 bias:norm regularization 往往只用于限制 weights,我们基本不会对 bias 施加 regularization。因为 bias 本身不太会导致 variance 和 overfitting。当前的深度学习框架,weight decay 默认只作用于每一层 layer 的 weights。如果手动写 ML 模型,这一点要特别注意。
2. 给每层 NNlayer 不同的 decay?研究发现,在神经网络中,有时候每一层 layer 使用不同的 weight decay 常数会得到更好的效果。但是可能的组合太多了,很难找到最正确的配置。
第二种实现方式,是重投影,或者说硬约束法,这种方法求解的是一个与 等价的有约束优化问题:


它将参数的 norm 项作为一个“硬约束”来处理,而不是添加到目标函数中。具体如何实现呢?在每次 gradient descent 后,我们需要做一个重投影(reprojection),将参数投影到可行域 中最近的点。现有的研究提出了在神经网络中实施硬约束的策略:
对每一层神经网络的参数矩阵,约束其列向量的 norm,而不是整个矩阵的 norm。这样可以有效防止某一个神经元的 weight 过大。分析发现,这其实等价于对每个神经元的 weight,用不同的常数来做 weight decay。
然而,这两种实现方式各有优缺点,下面逐一分析:
1. weight decay 无差别地持续衰减参数会造成 dead unit:比较大型的任务中,我们训练很多个 epochs,即使我们常把 weight decay 常数设置的很小(比如 1e-4),经过很多次迭代更新,如果优化问题是非凸的,模型容易陷入一个参数值很小的局部最优点。
尤其在训练神经网络中,很可能造成死亡神经元(dead unit),也就是由于这里的参数太小,神经元的输出很小,对整体模型没什么存在的意义。而相比之下,硬约束的方式只有在 的时候才进行重投影, 时不操作,这样不会无差别地让参数趋向原点。
2. 重投影稳定性更高,可以使用较大的 learning rate。Hinton 的研究提出使用硬约束+大 learning rate 来快速探索参数,并保持稳定性。
3. 超参数的选择:当我们明确知道 中 的理想值,比如,我们明确想要 是一个 one-hot vector,也就是 ,那么重投影的方式可能更有用,如果采用 weight decay,我们很难准确找到对应某个 的那个合适的常数 ,因为它们之间没有明确的映射关系,我们不得不尝试不同的超参数来寻找最佳的值。
4. 选定常数后,weight decay 可以在更新参数的同时一步实现,但重投影则需要额外的步骤。
3.L2-regularization与【欠定问题】
上面提到的 L2-regularization,在特殊情况下,能使无法求解的欠定问题变得可解。这个角度并不是 regularization,但也是值得注意。
在 linear regression 模型中,我们知道,求解 linear regression 可以直接写出解析解(closed-form solution),需要对协方差矩阵 (covariance matrix)求逆:

然而,当样本数量 N 小于特征维度 D,这是个欠定的(underdetermined/under-constrained)问题,协方差矩阵不可逆,它的尺寸是 DxD,而秩是 。这意味着最大似然估计不存在。
此时的解决方案之一就是采用ridge regression,优化问题变成了

数学上与 L2-regularization 一模一样, 此时的解变成了

求逆的矩阵一个满秩的可逆矩阵,使欠定问题得以求解。从特征值的角度解释,协方差矩阵的特征值都是非负的,ridge regression 使所有特征值增加 c,保证所有特征值都为正,矩阵变得可逆。
4.Dropout layer
Dropout 与 batchnorm layer,是神经网络中无比常用的 layer,本文讨论一下他们促进泛化的机理、弊端、以及理论上存在的冲突。
4.1 促进泛化的机理是什么呢
Dropout 是一种计算量低,但效果强大的 regularization。它的本质是一种集成模型(emsemble method),为什么这样说呢?在训练时,dropout layer 是通过随机生成一个蒙版(mask),按一定的概率,将部分神经元遮住,只使用剩余的神经元计算这一次的输出,下一个 iteration,生成一个新的随机 mask,遮住另一部分神经元。这样,各种可能的 mask 遮盖模型后,其实产生了各种各样的子模型,如图所示:
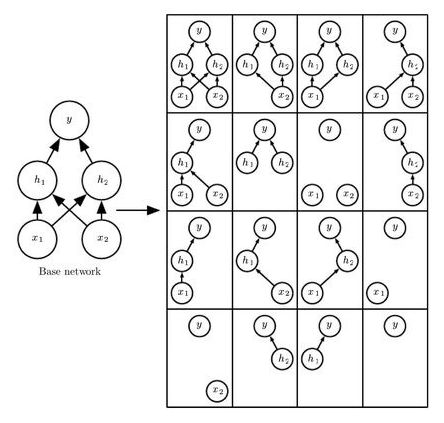
▲ Dropout layer:原模型用不同的遮盖方式,对应不同的子模型,训练的过程其实是在训练这些子模型的集合
训练神经网络的过程,其实是训练这些子模型的集合,也就是一堆子模型构成的 ensemble model。原理上,ensembling 本身对不同模型的输出取(加权)平均,解决了单个模型不稳定的问题,降低了 variance。我们之后会单独讲讲 ensemble method。
当然,这并不是 100% 地复刻 ensemble method,为什么呢? 为了使有 dropout 和关掉 dropout(测试的时候 dropout 关闭)产生的输出结果具有相同的期望值,我们往往在训练时缩放参数或者神经元的值,比如,如果 dropout p=0.5,训练时可以将神经元们的输出 x2,来弥补缺少一部分神经元所带来的输出的损失,或者神经元的值不变,将参数 x2 来计算输出;也有一种方法是,训练不做改变,在测试(inference)的时候,让参数 x0.5。
但这种缩放不是完美的,当模型中有非线性的 hidden unit 时,输出结果的期望只是对 ensemble 输出期望值得一个近似,如果模型完全是现行的,输出的期望值被证明是完全等于 emsemble 的。
Dropout 的成功不是源于训练时的随机性,而是源于结合多个子模型时这种 bagging 效果,是一种“集体的智慧”。
另外,研究发现,dropout 应用于线性回归时,等价于一种 weight decay,但每个输入特征的 weight decay 常数不同,取决于这个特征的 variance。在其他线性模型上也有同样的结论。然而对深度模型,dropout不等价于 weight decay。
4.2 什么情况下dropout没有用,甚至使结果变差?
1. 模型不够大,足够复杂的模型才能抵消 dropout 带来的模型容量的降低;
2. 数据集很大很大,此时几乎所有的 regularization 方法都没什么作用了,且引入 dropout 运算增加的弊端远远盖过了 regularization 带来的好处;
3. 有标签的训练数据(labeled data)太少,研究发现此时贝叶斯神经网络(bayesian neural network)性能远超 dropout,半监督学习也胜过 dropout。
4.3 与batchnorm一起使用时的问题:variance shift
实际上,我们经常发现 dropout 和 batchnorm 一起使用,比如 DNN 中这样搭配
layers = [
nn.Linear(in_size, 1024),
nn.BatchNorm1d(1024),
nn.ReLU(),
nn.Dropout(0.2),
......然而,有研究提出,dropout 和 batchnorm 一起用时有可能会使效果变差,这是因为,当我们结束训练进入测试时,dropout 会改变一个神经元的方差(variance),而 batchnorm 由于归一化,在测试时,则会致力于保持训练时所累积的统计方差。这种 variance 上的冲突,被称为 variance shift,研究发现他会导致测试阶段不稳定。有兴趣的可以详细阅读这篇文章“Understanding the Disharmony between Dropout and Batch Normalization by Variance Shift”。
尽管理论上存在这样的冲突,在目前的很多开源模型中,不难发现两者搭配使用却如此的流行并且具有可观的性能,这一理论的冲突也被多数人所忽视。更确切的结论可能还需要进一步的研究和验证。
5.Early stopping
在训练复杂模型时,我们可能经常发现,在训练了很多epoch后,测试误差先减少后有逐渐增加,此时意味着模型产生了过拟合(overfitting),已经变得不好了。
为了获得测试误差最低,泛化能力最好的模型,我们可以采用 early stopping,在训练时注意阶段性地保存模型,当发现 overfitting 时,就可以停止训练节省时间,并返回测试结果最好的模型。
听起来好像是一些废话,但从泛化的角度上看,early stopping 实现了一个模型选择(model selection)的过程,而且努力减少了不必要的训练。
大致上,early stopping 需要一下几个元素:
预热时长 -n:先预训练 n 个 epochs,不测试模型,之后开始训练+测试+训练+测试.....
耐心 -p:当连续 p 个 epochs 都观测到测试结果变差,则放弃训练
最佳模型:训练过程中保存和更新迄今为止的最佳模型
具体的 early stopping 算法也有很多变体,比如预热时在小数据集上训练若干 epochs,之后在完整数据集上训练并测试若干 epochs,中途若测试误差高于预热时的训练误差,则放弃训练。
编辑:王菁
校对:林亦霖