Linux驱动开发(十七)---树莓派PWM驱动
前文回顾
《Linux驱动开发(一)—环境搭建与hello world》
《Linux驱动开发(二)—驱动与设备的分离设计》
《Linux驱动开发(三)—设备树》
《Linux驱动开发(四)—树莓派内核编译》
《Linux驱动开发(五)—树莓派设备树配合驱动开发》
《Linux驱动开发(六)—树莓派配合硬件进行字符驱动开发》
《Linux驱动开发(七)—树莓派按键驱动开发》
《Linux驱动开发(八)—树莓派SR04驱动开发》
《Linux驱动开发(九)—树莓派I2C设备驱动开发(BME280)》
《Linux驱动开发(十)—树莓派输入子系统学习(红外接收)》
《Linux驱动开发(十一)—树莓派SPI驱动学习(OLED)》
《Linux驱动开发(十二)—树莓派framebuffer学习(改造OLED)》
《Linux驱动开发(十三)—USB驱动HID开发学习(鼠标)》
《Linux驱动开发(十四)—USB驱动开发学习(键盘+鼠标)》
《Linux驱动开发(十五)—如何使用内核现有驱动(显示屏)》
《Linux驱动开发(十六)—块设备驱动》
今天来学习一下PWM,这个东西在控制电动机方面还是挺有作用,万一以后用到的上呢。

PWM
脉宽调制(PWM,Pulse Width Modulation)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
PWM值是在一个周期内,开关管导通时间长短相加的平均值。导通时间越长,则直流输出的平均值越大;
PWM占空比是一个周期内,导通时间与周期时间的一个比值。
根据面积等效法则,可以通过对改变脉冲的时间宽度,来等效的获得所需要合成的相应幅值和频率的波形;
例如模拟正弦波,就是不停改变占空比,让每一时刻的等效电压按照正弦波的波形变化。


-
pwm的频率:
是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期);
也就是说一秒钟PWM有多少个周期
单位: Hz
表示方式: 50Hz 100Hz -
pwm的周期:
T=1/f
周期=1/频率
50Hz = 20ms 一个周期
如果频率为50Hz ,也就是说一个周期是20ms 那么一秒钟就有 50次PWM周期 -
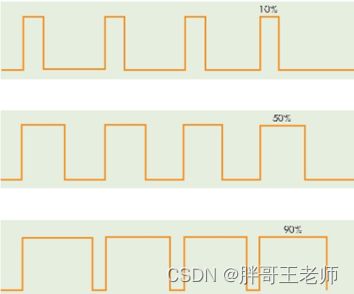
占空比:
是一个脉冲周期内,高电平的时间与整个周期时间的比例
单位: % (0%-100%)
表示方式:20%
摘自《PWM原理 PWM频率与占空比详解》。
里面还介绍了如何控制LED产生呼吸效果和舵机的转动角度。后续我们要深入学习。

设备树修改
树莓派是支持PWM的,看了一下补充文档中的内容,给了例子。
BCM2835 PWM controller (Raspberry Pi controller)
Required properties:
- compatible: should be "brcm,bcm2835-pwm"
- reg: physical base address and length of the controller's registers
- clocks: This clock defines the base clock frequency of the PWM hardware
system, the period and the duty_cycle of the PWM signal is a multiple of
the base period.
- #pwm-cells: Should be 3. See pwm.yaml in this directory for a description of
the cells format.
Examples:
pwm@2020c000 {
compatible = "brcm,bcm2835-pwm";
reg = <0x2020c000 0x28>;
clocks = <&clk_pwm>;
#pwm-cells = <3>;
};
clocks {
....
clk_pwm: pwm {
compatible = "fixed-clock";
reg = <3>;
#clock-cells = <0>;
clock-frequency = <9200000>;
};
....
};
其实这个配置,树莓派已经给配置好了,只需要打开就可以。

并且开发板上已经带了驱动了
root@raspberrypi:/sys/class/pwm# ls /lib/modules/5.15.55-v7+/kernel/drivers/pwm/
pwm-bcm2835.ko pwm-pca9685.ko pwm-raspberrypi-poe.ko
修改一下设备树,看看能否加载驱动。
这个设备树如何修改,其实很简单,只需要加上下面
&pwm {
status = "okay";
};
至于这个调用关系,我也是找了很久,根据bcm2837的数据手册,找到这个地址

然后我们看一下bcm283x.dtsi被谁包含

再看bcm2837.dtsi被谁包含

正好这个bcm2710.dtsi就在我们使用的设备树中包含。
所以直接打开pwm就可以了。

其实在原始定义部分是这样的
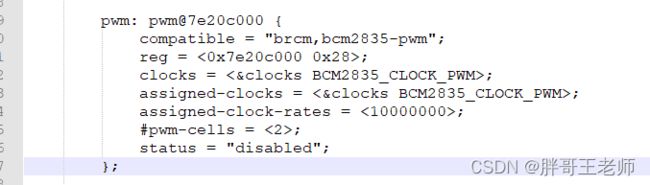
然后更新dts,重启设备
root@raspberrypi:/home/pgg# cd /sys/class/pwm/
root@raspberrypi:/sys/class/pwm# ls
pwmchip0

PWM配置
操作方法,参考《linux操作PWM命令》
生成目录
root@raspberrypi:/sys/class/pwm/pwmchip0# echo 1 > /sys/class/pwm/pwmchip0/export
会生成
下面有几个文件可以配置
- enable :写入1使能pwm,写入0关闭pwm
- polarity :有normal和inversed两个参数选择,表示输出引脚电平翻转。
- duty_cycle :单位纳秒,
在normal模式下,表示高电平持续的时间
在inversed模式下,表示低电平持续时间。 - period :单位纳秒,表示pwm波持续周期
使用例子:配置一个50%占空比pwm。
设置PWM一个周期的时间,单位为ns
root@raspberrypi:/sys/class/pwm/pwmchip0# echo 1000000 > /sys/class/pwm/pwmchip0/pwm1/period
设置PWM一个周期中“ON”的时间,单位为ns,占空比为50%
root@raspberrypi:/sys/class/pwm/pwmchip0# echo 500000 > /sys/class/pwm/pwmchip0/pwm1/duty_cycle
使能 PWM
root@raspberrypi:/sys/class/pwm/pwmchip0# echo 1 > /sys/class/pwm/pwmchip0/pwm1/enable
关闭 PWM
root@raspberrypi:/sys/class/pwm/pwmchip0# echo 0 > /sys/class/pwm/pwmchip0/pwm1/enable

重点!重点!
驱动中的驱动
之前就一直在思考,如果两个驱动怎么传递数据,难道还需要经过用户空间吗?那感觉好傻啊。事实证明,我们可以在驱动中调用其他的驱动,简单的例子就是,用PWM控制led灯。
部分内容参考自《Linux驱动 | LED驱动(使用PWM子系统)》

led是我要驱动的设备,这个设备中用到了pwm,而pwm是用默认的驱动。这里需要先修改设备树,如何定义自己的LED设备,包含pwm设备。
阅读Documentation/devicetree/bindings/pwm/pwm.txt
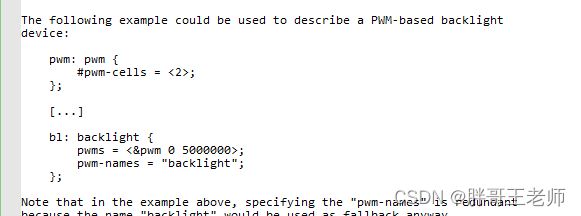
我们就可以修改一个我们的PWM驱动的LED设备

我们自己写一个驱动。内部在使用PWM子系统。形成了包含驱动的驱动。
驱动代码
#include 这里要注意的就是,我们不需要注册pwm设备,而是从设备树获取这个设备就可以
my_pwm_led_dev.led_pwm = devm_of_pwm_get(tdev, child, NULL); /* 从子节点中获取PWM设备 */
用户侧程序
#include "stdio.h"
#include 别以为到这里就结束了,其实上面的代码都有问题。

调试过程
第一步调用shell的方式,就发现和PWM相关的那些引脚,都没有反应。翻看了一遍设备树,也没有找到怎么配置PWM输出到哪个引脚上,这感觉像是缺少点配置。于是经过搜索,发现了一个类似的博客
《LINUX驱动开发11:【设备树】NANOPI的PWM驱动》,在配置设备树的时候,似乎要配置使用的引脚。
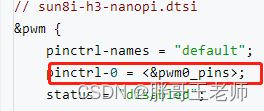
所以我这里也需要增加一个引脚,但这个引脚怎么写呢
于是我反编译了生成的dtb,查看到了树莓派中pwm引脚的定义
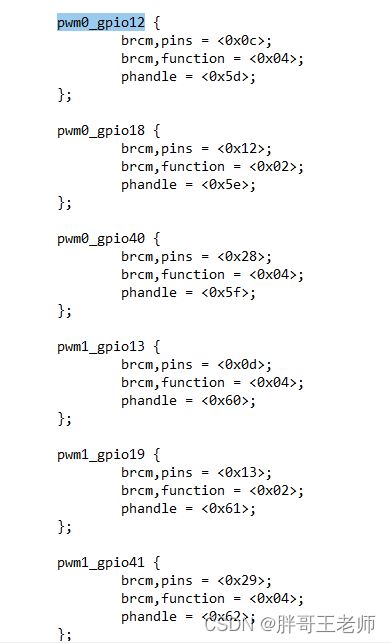
那么灵感来了,设备树修改成这样,感觉八九不离十了

继续上机调试,shell命令行的方式,成功了!!
然后就是调试led驱动,结果发现灯一直是灭的。突然又来灵感了,配置pwm,必须要先关停pwm,所以,修改了驱动中的代码,在配置前后都加上了禁用和启用

然后用户侧的程序,进行了优化,连续让灯变亮变暗
while(1)
{
if(led_pwm.duty_ns<=500)
{
while(led_pwm.duty_ns<led_pwm.period_ns)
{
ioctl(fd, LED_PWM_CMD_SET_DUTY, &led_pwm.duty_ns);
sleep_ms(50);
led_pwm.duty_ns += 300;
}
}
else
{
while(led_pwm.duty_ns > 500)
{
ioctl(fd, LED_PWM_CMD_SET_DUTY, &led_pwm.duty_ns);
sleep_ms(50);
led_pwm.duty_ns -= 300;
}
}
}
测试起来!
小技巧
在搜索dts文件的时候,常用下面命令,用来找到包含关键内容的文件,及在文件第几行。
grep "内容" * -nr
前面搜索pwm配置的时候,就用到了这种命令。

结束语
昨天看到夫人给发的孩子照片,突然感觉像一个大孩子了。结果下午出去玩,上厕所出来走丢了,也知道告诉热心人父母的电话,帮忙联系父母。
我很欣慰啊,就算被人拐卖走了,应该也能找回来了。

夫人说得克制一下脾气了,孩子前天晚上说:我只有一个烦恼,就是妈妈爱发火。害,人哪能没有烦恼呢,没有烦恼,那不就光剩快乐了吗,这不符合我们社会主义初级阶段的国情。

今天上午公司有试用期员工转正大会,赶紧收工,一会去看热闹。
