不同类型的卷积操作
- 原始版本卷积操作
 |
这种卷积操作叫SAME Padding,卷积操作后原图与特征图大小相同。每次移动一个格子 |
 |
这种卷积操作叫VALUE Padding,卷积操作后原图比特征图要大,每次移动的步长为2 |
代表模型:
LeNet:最早使用stack单卷积+单池化结构的方式,卷积层来做特征提取,池化来做空间下采样
AlexNet:后来发现单卷积提取到的特征不是很丰富,于是开始stack多卷积+单池化的结构
VGG([1409.1556] Very Deep Convolutional Networks for Large-Scale Image Recognition):结构没怎么变,只是更深
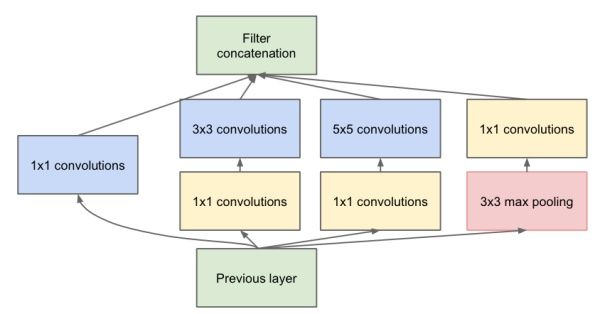
- 多隐层非线性版本---Inception
融合了Network In Network的增加隐层提升非线性表达的思想,先用1*1的卷积映射到隐空间,再在隐空间做卷积的结构。
可同时考虑多个尺度,在单层卷积层中用多个不同大小的卷积核来卷积,再把结果concat起来。
代表模型:
Inception-v1([1409.4842] Going Deeper with Convolutions):stack以上这种Inception结构
Inception-v2(Accelerating Deep Network Training by Reducing Internal Covariate Shift):加了BatchNormalization正则,去除5*5卷积,用两个3*3代替
Inception-v3([1512.00567] Rethinking the Inception Architecture for Computer Vision):7*7卷积又拆成7*1+1*7
Inception-v4([1602.07261] Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning):加入了残差结构
- 空洞卷积----dilation conv
通常翻译为空洞卷积或是膨胀卷积操作, 它是解决pixel-wise输出模型的一种常用的卷积方式。
一种普遍的认识是,pooling下采样操作导致的信息丢失是不可逆的,通常的分类识别模型,只需要预测每一类的概率,所以我们不需要考虑pooling会导致损失图像细节信息的问题,但是做像素级的预测时(譬如语义分割),就要考虑到这个问题了。
所以就要有一种卷积代替pooling的作用(成倍的增加感受野),而空洞卷积就是为了做这个的。通过卷积核插“0”的方式,它可以比普通的卷积获得更大的感受野, 原理如下:
 |
向卷积层引入了一个称为 “扩张率(dilation rate)”的新参数,该参数定义了卷积核处理数据时各值的间距 |
代表模型:
FCN([1411.4038] Fully Convolutional Networks for Semantic Segmentation):Fully convolutional networks,顾名思义,整个网络就只有卷积组成,在语义分割的任务中,因为卷积输出的feature map是有spatial信息的,所以最后的全连接层全部替换成了卷积层。
Wavenet(WaveNet: A Generative Model for Raw Audio):用于语音合成。
- 可分离卷积------ Separable Convolution
这个工作可以说是Inception的延续,它是Inception结构的极限版本。
在Google的Xception[1]以及MobileNet[2]论文中均有描述。它的核心思想是将一个完整的卷积运算分解为两步进行,分别为Depthwise Convolution与Pointwise Convolution
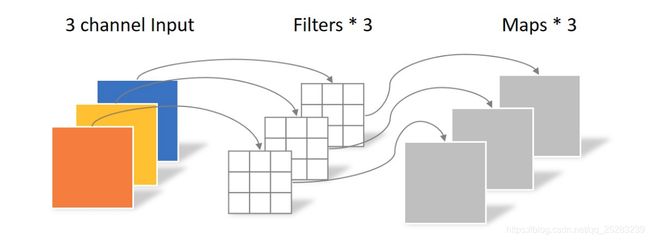
- Depthwise Convolution
一个大小为64×64像素、三通道彩色图片首先经过第一次卷积运算,不同之处在于此次的卷积完全是在二维平面内进行,且Filter的数量与上一层的Depth相同。所以一个三通道的图像经过运算后生成了3个Feature map,如下图所示。
Depthwise Convolution完成后的Feature map数量与输入层的depth相同,但是这种运算对输入层的每个channel独立进行卷积运算后就结束了,没有有效的利用不同map在相同空间位置上的信息。因此需要增加另外一步操作来将这些map进行组合生成新的Feature map,即接下来的Pointwise Convolution。
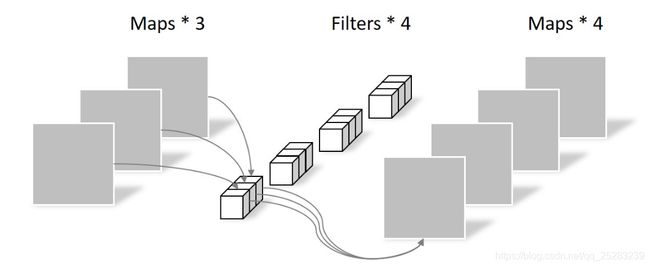
- Pointwise Convolution
Pointwise Convolution的运算与常规卷积运算非常相似,不同之处在于卷积核的尺寸为 1×1×M,M为上一层的depth。所以这里的卷积运算会将上一步的map在深度方向上进行加权组合,生成新的Feature map。有几个Filter就有几个Feature map。如下图所示。
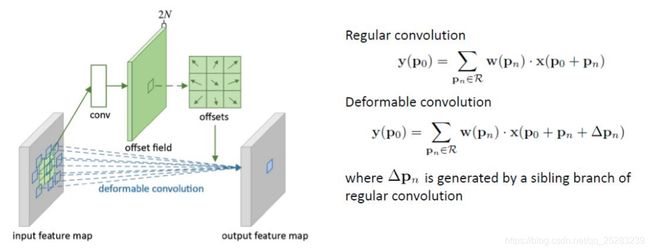
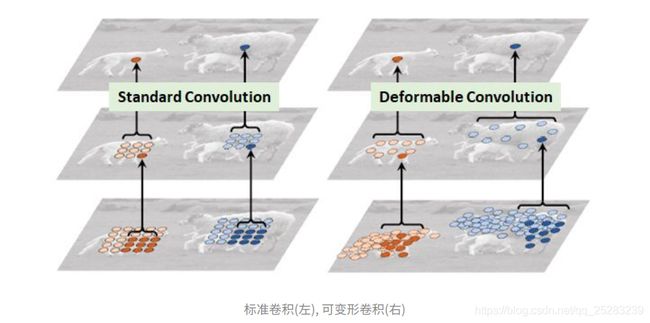
- 可变形卷积 ------Deformable Convolutional
可形变卷积的思想很巧妙:它认为规则形状的卷积核(比如一般用的正方形3*3卷积)可能会限制特征的提取,如果赋予卷积核形变的特性,让网络根据label反传下来的误差自动的调整卷积核的形状,适应网络重点关注的感兴趣的区域,就可以提取更好的特征。
代码: https://github.com/4uiiurz1/pytorch-deform-conv-v2
 |
|
- 特征重标定卷积
这是ImageNet 2017 竞赛 Image Classification 任务的冠军模型SENet的核心模块,原文叫做”Squeeze-and-Excitation“
和前面不同的是,这个卷积是对特征维度作改进的。一个卷积层中往往有数以千计的卷积核,而且我们知道卷积核对应了特征,于是乎那么多特征要怎么区分?这个方法就是通过学习的方式来自动获取到每个特征通道的重要程度,然后依照计算出来的重要程度去提升有用的特征并抑制对当前任务用处不大的特征。
思想:
首先做普通的卷积,得到了一个的output feature map,它的shape为[C,H,W],根据paper的观点,这个feature map的特征很混乱。然后为了获得重要性的评价指标,直接对这个feature map做一个Global Average Pooling,然后我们就得到了长度为C的向量。(这里还涉及到一个额外的东西,如果你了解卷积,你就会发现一旦某一特征经常被激活,那么Global Average Pooling计算出来的值会比较大,说明它对结果的影响也比较大,反之越小的值,对结果的影响就越小)
然后我们对这个向量加两个FC层,做非线性映射,这俩FC层的参数,也就是网络需要额外学习的参数。
最后输出的向量,我们可以看做特征的重要性程度,然后与feature map对应channel相乘就得到特征有序的feature map了。
代表模型:Squeeze-and-Excitation Networks(Squeeze-and-Excitation Networks )
参考:
CNN中千奇百怪的卷积方式大汇总