【OpenCV】- 多边形将轮廓包围
说明:实际应用中,常常会将检测到的轮廓用多边形表示出来的需求。
1、返回外部矩形边界:boundingRect()函数
说明:此函数计算并返回指定点集最外面的矩形边界
Rect point=boundingRect(InputArray points)
唯一的参数为输入的二维点集,可以是std::vector或Mat类型
2、寻找最小包围矩形:minAreaRect()函数
说明:对于给定的2D点集,寻找可旋转的最小面积的包围矩形,返回四个点
RotatedRect box=minAreaRect(InputArray points)
唯一的参数为输入的二维点集,可以是std::vector或Mat类型
示例程序:创建包围轮廓的矩形边界
说明:随机生成3~103个彩色点,然后绘制一个可以旋转的最小矩形,把随机生成的点都包围进去
#include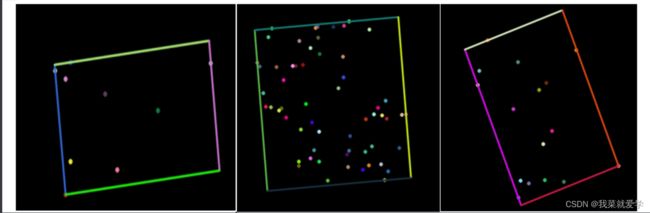
3、寻找最小包围圆形:minEnclosingCircle()函数
说明:利用迭代算法,对给定的2D点集,去寻找面积最小的可包围它们的圆形
void minEnclosingCircle(InputArray points,Point2f& center,float& radius)
- 第一个参数:输入的二维点集,可以为std::vector<>或Mat类型
- 第二个参数:圆的输出圆心
- 第三个参数:圆的输出半径
示例程序:创建包围轮廓的圆形边界
说明:随机生成3~103个彩色点,然后绘制一个可以旋转的圆,把随机生成的点都包围进去
#include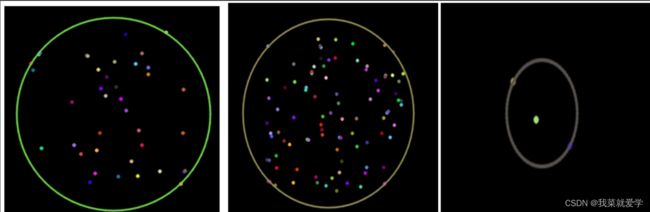
4、用椭圆拟合二维点集:fitEllipse()函数
说明:此函数作用是椭圆拟合二维点集
void RotatedRect fitEllipse(InputArray points)
唯一的参数为输入的二维点集,可以是std::vector或Mat类型
5、逼近多边形曲线:approxPolyDP()函数
说明:approxPolyDP()函数是用指定精度逼近多边形曲线
void approxPolyDP(InputArray curve,OutputArray approxCurve,double epsilon,bool closed)
- 第一个参数:InputArray类型的curve输入的二维点集,可以为std::vector或Mat类型
- 第二个参数:OutputArray 类型的approxCurve多边形逼近的结果,其类型应该和输入的二维点集的类型一致。
- 第三个参数:double类型的epsilon逼近的精度,为原始曲线和即近似曲线间的最大值
- 第四个参数:bool类型的closed如果其为真,则近似的曲线为封闭曲线(首尾相连),否则,曲线不封闭。
6、综合示例程序:使用多边形包围轮廓
#include原图展示:
阈值为50效果图:
阈值25的时候:

阈值150的时候: