基于OV7670摄像头图像实时边缘检测
目录
一、总体系统框图
二、Sobel边缘检测算法原理
三、算法实现
四、代码
1、RGB转Ycbcr代码
2、边缘检测代码
五、仿真测试
1、移位寄存器仿真
2、卷积操作
六、上板验证
一、总体系统框图
如下图所示实时图像边缘检测的整体系统框图:
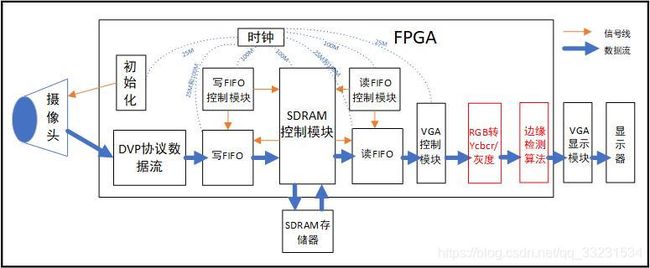
在本人前面博客中有个专栏《OV7670摄像头显示》,本专栏主要是对OV7670摄像头在FPGA平台上实现图像采集和显示。本次对于预想边缘检测的工程是在此代码基础上进行拓展延伸的。如上图所示,其中红色部分就是添加的部分,后边会补充RGB图像转Ycbcr图像格式的博客,此处不再多讲。
二、Sobel边缘检测算法原理
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
Sobel算子为:
 Gx横向边缘提取
Gx横向边缘提取
 Gy纵向边缘提取
Gy纵向边缘提取
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:
 (1)
(1)
 (2)
(2)
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
![]() (3)
(3)
通常,为了提高效率 使用不开平方的近似值:
![]() (4)
(4)
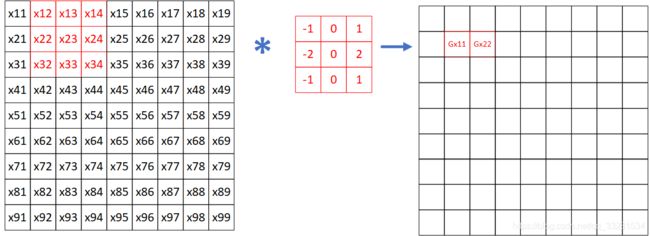
假设9*9图像数据如图所示:

当对(1)式进行运算时,如下

将红色部分对应相乘求和即可:![]() ,接着继续滑动求即可如下:
,接着继续滑动求即可如下:
补充:Prewitt算子

Roberts算子:

三、算法实现
本代码仅适用于本系统,了解算法思路略做修改在用在自己系统上。主要用到移位寄存器的使用:
由于本系统的图像是640*480,每个像素是8位的灰度图像,因此寄存器使用的数据宽度是8位,因为矩阵是3*3的,tap需要2个,再加上输入可组成3行数据流水线输出,组成矩阵进行运算,其原理如下:
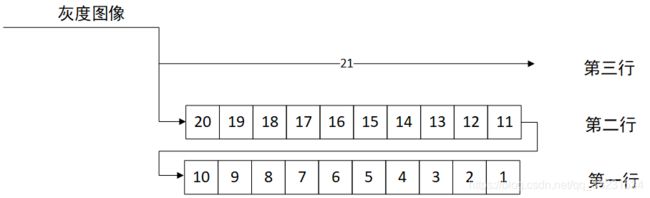
这样三级流水线可对图像三行数据进行操作,若要实现3*3矩阵操作,可对上述三行数据进行三级寄存器操作,就可以操作3*3的矩阵了,就不在赘述了。移位寄存器IP设置如下

四、代码
1、RGB转Ycbcr代码
// 24位RGB转Ycbcr
module rgb_ycbcr(
input clk ,
input rst_n ,
input [23:0] i_VGA_RGB ,
input i_VGA_HS ,
input i_VGA_VS ,
input i_VGA_BLK ,
input i_data_en ,
input [9:0] i_hcount ,
input [9:0] i_vcount ,
output [23:0] o_ycrcb ,
output o_VGA_HS ,
output o_VGA_VS ,
output o_VGA_BLK ,
output o_data_en ,
output [9:0] o_hcount ,
output [9:0] o_vcount
);
//浮点数的定点化,乘256
localparam y_r = 10'd66 ;//y通道r前面系数,0.257定点数
localparam y_g = 10'd144 ;//y通道g前面系数,0.564定点数
localparam y_b = 10'd25 ;//y通道b前面系数,0.098定点数
localparam y_c = 13'd4096 ;//y通道常数前面系数,16定点数
localparam cb_r = 10'd38 ;//cb通道r前面系数,0.148定点数
localparam cb_g = 10'd74 ;//cb通道g前面系数,0.291定点数
localparam cb_b = 10'd112 ;//cb通道b前面系数,0.439定点数
localparam cb_c = 16'd32768 ;//cb通道常数前面系数,128定点数
localparam cr_r = cb_b ;//cr通道r前面系数,0.439定点数
localparam cr_g = 10'd94 ;//cr通道g前面系数,0.368定点数
localparam cr_b = 10'd18 ;//cr通道b前面系数,0.071定点数
localparam cr_c = cb_c ;//cr通道常数前面系数,128定点数
//第一级流水线
reg [17:0] mult_r_for_y ;
reg [17:0] mult_g_for_y ;
reg [17:0] mult_b_for_y ;
reg [17:0] mult_r_for_cb ;
reg [17:0] mult_g_for_cb ;
reg [17:0] mult_b_for_cb ;
reg [17:0] mult_r_for_cr ;
reg [17:0] mult_g_for_cr ;
reg [17:0] mult_b_for_cr ;
//第二级流水线
reg [17:0] add_y_0 ;
reg [17:0] add_y_1 ;
reg [17:0] add_cb_0 ;
reg [17:0] add_cb_1 ;
reg [17:0] add_cr_0 ;
reg [17:0] add_cr_1 ;
//第三极流水线
wire sian_cb ;
wire sian_cr ;
reg [17:0] result_y ;
reg [17:0] result_cb ;
reg [17:0] result_cr ;
reg [9:0] y_temp ;
reg [9:0] cb_temp ;
reg [9:0] cr_temp ;
wire [7:0] o_y ;
wire [7:0] o_cb ;
wire [7:0] o_cr ;
//延时3个时钟周期
reg i_VGA_HS_1 ;
reg i_VGA_VS_1 ;
reg i_VGA_BLK_1 ;
reg i_data_en_1 ;
reg i_VGA_HS_2 ;
reg i_VGA_VS_2 ;
reg i_VGA_BLK_2 ;
reg i_data_en_2 ;
reg i_VGA_HS_3 ;
reg i_VGA_VS_3 ;
reg i_VGA_BLK_3 ;
reg i_data_en_3 ;
reg [9:0] i_hcount_1 ;
reg [9:0] i_vcount_1 ;
reg [9:0] i_hcount_2 ;
reg [9:0] i_vcount_2 ;
reg [9:0] i_hcount_3 ;
reg [9:0] i_vcount_3 ;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
mult_r_for_y <=0 ;
mult_g_for_y <=0 ;
mult_b_for_y <=0 ;
mult_r_for_cb <=0 ;
mult_g_for_cb <=0 ;
mult_b_for_cb <=0 ;
mult_r_for_cr <=0 ;
mult_g_for_cr <=0 ;
mult_b_for_cr <=0 ;
end
else begin
mult_r_for_y <= y_r * i_VGA_RGB[23:16] ;
mult_g_for_y <= y_g * i_VGA_RGB[15: 8] ;
mult_b_for_y <= y_b * i_VGA_RGB[ 7: 0] ;
mult_r_for_cb <= cb_r * i_VGA_RGB[23:16] ;
mult_g_for_cb <= cb_g * i_VGA_RGB[15: 8] ;
mult_b_for_cb <= cb_b * i_VGA_RGB[ 7: 0] ;
mult_r_for_cr <= cr_r * i_VGA_RGB[23:16] ;
mult_g_for_cr <= cr_g * i_VGA_RGB[15: 8] ;
mult_b_for_cr <= cr_b * i_VGA_RGB[ 7: 0] ;
end
end
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
add_y_0 <= 0 ;
add_y_1 <= 0 ;
add_cb_0 <= 0 ;
add_cb_1 <= 0 ;
add_cr_0 <= 0 ;
add_cr_1 <= 0 ;
end
else begin
add_y_0 <= mult_r_for_y + mult_g_for_y ;
add_y_1 <= mult_b_for_y + y_c ;
add_cb_0 <= mult_r_for_cb + mult_g_for_cb ; //负
add_cb_1 <= mult_b_for_cb + cb_c ;
add_cr_0 <= mult_g_for_cr + mult_b_for_cr ; //负
add_cr_1 <= mult_r_for_cr + cb_c ;
end
end
assign sian_cb = (add_cb_1>=add_cb_0);
assign sian_cr = (add_cr_1>=add_cr_0);
always @(posedge clk or negedge rst_n)begin
if (!rst_n) begin
result_y <= 0 ;
result_cb <= 0 ;
result_cr <= 0 ;
end
else begin
result_y <= add_y_0 + add_y_1 ;
result_cb <= sian_cb ? (add_cb_1-add_cb_0) : 18'd0;
result_cr <= sian_cr ? (add_cr_1-add_cr_0) : 18'd0;
end
end
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
y_temp <= 0;
cb_temp <= 0;
cr_temp <= 0;
end
else begin
y_temp <= result_y[17:8];
cb_temp <= result_cb[17:8];
cr_temp <= result_cr[17:8];
end
end
assign o_y = (y_temp[9:8]==2'b00) ? y_temp[7:0] : 8'hff ;
assign o_cb = (cb_temp[9:8]==2'b00) ? cb_temp[7:0] : 8'hff ;
assign o_cr = (cr_temp[9:8]==2'b00) ? cr_temp[7:0] : 8'hff ;
assign o_ycrcb = {o_y,o_cb,o_cr};
always @(posedge clk or negedge rst_n)begin
if (!rst_n) begin
i_VGA_HS_1 <= 0 ;
i_VGA_VS_1 <= 0 ;
i_VGA_BLK_1 <= 0 ;
i_data_en_1 <= 0 ;
i_VGA_HS_2 <= 0 ;
i_VGA_VS_2 <= 0 ;
i_VGA_BLK_2 <= 0 ;
i_data_en_2 <= 0 ;
i_VGA_HS_3 <= 0 ;
i_VGA_VS_3 <= 0 ;
i_VGA_BLK_3 <= 0 ;
i_data_en_3 <= 0 ;
end
else begin
i_VGA_HS_1 <= i_VGA_HS ;
i_VGA_VS_1 <= i_VGA_VS ;
i_VGA_BLK_1 <= i_VGA_BLK;
i_data_en_1 <= i_data_en;
i_VGA_HS_2 <= i_VGA_HS_1 ;
i_VGA_VS_2 <= i_VGA_VS_1 ;
i_VGA_BLK_2 <= i_VGA_BLK_1 ;
i_data_en_2 <= i_data_en_1 ;
i_VGA_HS_3 <= i_VGA_HS_2 ;
i_VGA_VS_3 <= i_VGA_VS_2 ;
i_VGA_BLK_3 <= i_VGA_BLK_2 ;
i_data_en_3 <= i_data_en_2 ;
end
end
assign o_VGA_HS = i_VGA_HS_3;
assign o_VGA_VS = i_VGA_VS_3;
assign o_VGA_BLK = i_VGA_BLK_3;
assign o_data_en = i_data_en_3;
always@(posedge clk or negedge rst_n)begin
if (!rst_n) begin
i_hcount_1 <= 0 ;
i_vcount_1 <= 0 ;
i_hcount_2 <= 0 ;
i_vcount_2 <= 0 ;
i_hcount_3 <= 0 ;
i_vcount_3 <= 0 ;
end
else begin
i_hcount_1 <= i_hcount ;
i_vcount_1 <= i_vcount ;
i_hcount_2 <= i_hcount_1 ;
i_vcount_2 <= i_vcount_1 ;
i_hcount_3 <= i_hcount_2 ;
i_vcount_3 <= i_vcount_2 ;
end
end
assign o_hcount = i_hcount_3;
assign o_vcount = i_vcount_3;
endmodule2、边缘检测代码
//Sobel图像边缘检测
//输入一帧图像640*480
module edge_detection(
input clk ,
input rst_n ,
input data_en ,
input [7:0] gray_8bit ,
input [7:0] threshold ,
input o_VGA_HS ,
input o_VGA_VS ,
input o_VGA_BLK ,
output wire img_edge_en ,
output reg[7:0] img_edge_8bit , //638*478
output reg VGA_HS ,
output reg VGA_VS ,
output reg VGA_BLK ,
output wire[23:0] VGA_RGB
);
reg [9:0] cnt_row ;
reg [9:0] cnt_col ;
wire [7:0] shift_res_line1 ;
wire [7:0] shift_res_line2 ;
wire [7:0] shift_res_line3 ;
reg [9:0] shift_res_line1_x1;
reg [9:0] shift_res_line1_x2;
reg [9:0] shift_res_line1_x3;
reg [9:0] shift_res_line2_x4;
reg [9:0] shift_res_line2_x5;
reg [9:0] shift_res_line2_x6;
reg [9:0] shift_res_line3_x7;
reg [9:0] shift_res_line3_x8;
reg [9:0] shift_res_line3_x9;
reg [9:0] shift_res_line1_add;
reg [9:0] shift_res_line3_add;
//水平边缘列求和
reg [9:0] shift_res_col1_add;
reg [9:0] shift_res_col3_add;
reg [9:0] Gy ;
reg [9:0] Gx ;
reg [7:0] img_edge_8bit_r;
wire img_edge_en_r;
reg img_edge_en_r1;
reg img_edge_en_r2;
reg o_VGA_HS_r1 ;
reg o_VGA_HS_r2 ;
reg o_VGA_HS_r3 ;
reg o_VGA_VS_r1 ;
reg o_VGA_VS_r2 ;
reg o_VGA_VS_r3 ;
reg o_VGA_BLK_r1 ;
reg o_VGA_BLK_r2 ;
reg o_VGA_BLK_r3 ;
localparam ROW_NUM = 10'd480 ;
localparam COL_NUM = 10'd640 ;
shift_register shift_register_inst (
.aclr (1'b0),
.clken ( data_en ),
.clock ( clk ),
.shiftin ( gray_8bit ),
.shiftout ( ),
.taps0x ( shift_res_line2 ),
.taps1x ( shift_res_line1 )
);
assign img_edge_en_r = cnt_col>1 && cnt_row>1;
assign shift_res_line3 = cnt_row>1 ? gray_8bit : 8'd0;
assign VGA_RGB = {img_edge_8bit,img_edge_8bit,img_edge_8bit};
assign img_edge_en = img_edge_en_r2;
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_col <= 10'd0;
end
else if(data_en) begin
if (cnt_col==COL_NUM-1'b1) begin
cnt_col <= 10'd0;
end
else begin
cnt_col <= cnt_col + 1'b1;
end
end
end
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_row <= 10'd0;
end
else if(data_en&&cnt_col==COL_NUM-1'b1) begin
if (cnt_row==ROW_NUM-1'b1) begin
cnt_row <= 10'd0;
end
else begin
cnt_row <= cnt_row + 1'b1;
end
end
end
*********************************************************************************
//Sobel算子实现
//Gy垂直边缘[x1,x2,x3,x4,x5,x6,x7,x8,x9]= [1,2,1,0,0,0,-1,-2,-1]
//sobel矩阵对应的x1,x2,x3的像素值
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
shift_res_line1_x1 <= 10'd0;
shift_res_line1_x2 <= 10'd0;
shift_res_line1_x3 <= 10'd0;
end
else begin
shift_res_line1_x3 <= shift_res_line1;
shift_res_line1_x2 <= shift_res_line1_x3;
shift_res_line1_x1 <= shift_res_line1_x2;
end
end
//sobel矩阵对应的x4,x5,x6的像素值
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
shift_res_line2_x4 <= 10'd0;
shift_res_line2_x5 <= 10'd0;
shift_res_line2_x6 <= 10'd0;
end
else begin
shift_res_line2_x6 <= shift_res_line2;
shift_res_line2_x5 <= shift_res_line2_x6;
shift_res_line2_x4 <= shift_res_line2_x5;
end
end
//sobel矩阵对应的x7,x8,x9的像素值
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
shift_res_line3_x7 <= 10'd0;
shift_res_line3_x8 <= 10'd0;
shift_res_line3_x9 <= 10'd0;
end
else begin
shift_res_line3_x9 <= shift_res_line3;
shift_res_line3_x8 <= shift_res_line3_x9;
shift_res_line3_x7 <= shift_res_line3_x8;
end
end
//sobel矩阵对应的第一行乘机之和
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
shift_res_line1_add <= 0;
end
else begin
shift_res_line1_add <= shift_res_line1_x1 + shift_res_line1_x3 + (shift_res_line1_x2<<1);
end
end
//sobel矩阵对应的第三行乘机之和
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
shift_res_line3_add <= 0;
end
else begin
shift_res_line3_add <= shift_res_line3_x7 + shift_res_line3_x9 + (shift_res_line3_x8<<1);
end
end
//输出Gy垂直边缘卷机值
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
Gy <= 10'd0;
end
else if(shift_res_line1_add>=shift_res_line3_add) begin
Gy <= shift_res_line1_add - shift_res_line3_add;
end
else begin
Gy <= shift_res_line3_add - shift_res_line1_add;
end
end
*********************************************************************************
//Sobel算子实现
//Gy垂直边缘[x1,x2,x3,x4,x5,x6,x7,x8,x9]= [-1,0,1,-2,0,2,-1,0,1]
//sobel矩阵对应的第一列乘机之和
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
shift_res_col1_add <= 0;
end
else begin
shift_res_col1_add <= shift_res_line1_x1 + shift_res_line3_x7 + (shift_res_line2_x4<<1);
end
end
//sobel矩阵对应的第三列乘机之和
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
shift_res_col3_add <= 0;
end
else begin
shift_res_col3_add <= shift_res_line1_x3 + shift_res_line3_x9 + (shift_res_line2_x6<<1);
end
end
//输出Gx水平边缘卷机值
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
Gx <= 10'd0;
end
else if(shift_res_col3_add>=shift_res_col1_add) begin
Gx <= shift_res_col3_add - shift_res_col1_add;
end
else begin
Gx <= shift_res_col1_add - shift_res_col3_add;
end
end
*********************************************************************************
//输出计算后的灰度值
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
img_edge_8bit_r <= 8'd0;
end
else if(Gx+Gy>8'd255) begin
img_edge_8bit_r <= 8'd255;
end
else begin
img_edge_8bit_r <= Gx[7:0]+Gy[7:0];
end
end
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
img_edge_8bit <= 8'd0;
end
else if(img_edge_8bit_r>=threshold) begin
img_edge_8bit <= 8'd255;
end
else begin
img_edge_8bit <= 8'd0;
end
end
*********************************************************************************
//延迟4个时钟周期,4级寄存器和VGA时序对齐
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
img_edge_en_r1 <= 0;
img_edge_en_r2 <= 0;
end
else begin
img_edge_en_r1 <= img_edge_en_r;
img_edge_en_r2 <= img_edge_en_r1;
end
end
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
o_VGA_HS_r1 <= 0;
o_VGA_HS_r2 <= 0;
o_VGA_HS_r3 <= 0;
VGA_HS <= 0;
end
else begin
o_VGA_HS_r1 <= o_VGA_HS;
o_VGA_HS_r2 <= o_VGA_HS_r1;
o_VGA_HS_r3 <= o_VGA_HS_r2;
VGA_HS <= o_VGA_HS_r3;
end
end
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
o_VGA_VS_r1 <= 0;
o_VGA_VS_r2 <= 0;
o_VGA_VS_r3 <= 0;
VGA_VS <= 0;
end
else begin
o_VGA_VS_r1 <= o_VGA_VS;
o_VGA_VS_r2 <= o_VGA_VS_r1;
o_VGA_VS_r3 <= o_VGA_VS_r2;
VGA_VS <= o_VGA_VS_r3;
end
end
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
o_VGA_BLK_r1 <= 0;
o_VGA_BLK_r2 <= 0;
o_VGA_BLK_r3 <= 0;
VGA_BLK <= 0;
end
else begin
o_VGA_BLK_r1 <= o_VGA_BLK;
o_VGA_BLK_r2 <= o_VGA_BLK_r1;
o_VGA_BLK_r3 <= o_VGA_BLK_r2;
VGA_BLK <= o_VGA_BLK_r3;
end
end
endmodule
五、仿真测试
1、移位寄存器仿真
开始移入

第二行有输出

三行流水线输出

2、卷积操作

六、上板验证
无阈值灰度边缘检测
阈值为130的边缘检测
阈值为100的边缘检测
阈值为80的边缘检测
阈值为50的边缘检测