STM32MP157 Linux系统移植开发篇4: BootLoader(Uboot)移植
本文章为《STM32MP157 Linux系统移植开发篇》系列中的一篇,笔者使用的开发平台为华清远见FS-MP1A开发板(STM32MP157开发板)。stm32mp157是ARM双核,2个A7核,1个M4核,A7核上可以跑Linux操作系统,M4核上可以跑FreeRTOS、RT-Thread等实时操作系统,STM32MP157开发板所以既可以学嵌入式linux,也可以学stm32单片机。
针对FS-MP1A开发板,除了Linux系统移植篇外,还包括其他多系列教程,包括Cortex-A7开发篇、Cortex-M4开发篇、扩展板驱动移植篇、Linux应用开发篇、FreeRTOS系统移植篇、Linux驱动开发篇、硬件设计篇、人工智能机器视觉篇、Qt应用编程篇、Qt综合项目实战篇等。欢迎关注,更多stm32mp157开发教程及视频,可加技术交流Q群459754978,感谢关注。
关于FS-MP1A开发板:
手机淘宝分享码:复制本行文字打开手淘₤T4FPXn3YYJ2₤
链接:https://item.taobao.com/item.htm?id=622457259672
实验原理
概念
简单地说,Bootloader就是在操作系统内核运行之前运行的一段程序,它类似于PC机中的BIOS程序。通过这段程序,可以完成硬件设备的初始化,并建立内存空间的映射图的功能,从而将系统的软硬件环境带到一个合适的状态,为最终调用系统内核做好准备。
通常,Bootloader是严重地依赖于硬件实现的,特别是在嵌入式中。因此,在嵌入式世界里建立一个通用的Bootloader几乎是不可能的。尽管如此,仍然可以对Bootloader归纳出一些通用的概念来指导用户特定的Bootloader设计与实现。
(1)Bootloader所支持的CPU和嵌入式开发板
每种不同的CPU体系结构都有不同的Bootloader。有些Bootloader也支持多种体系结构的CPU,如后面要介绍的U-Boot就同时支持ARM体系结构和MIPS体系结构。除了依赖于CPU的体系结构外,Bootloader实际上也依赖于具体的嵌入式板级设备的配置。
(2)Bootloader的安装媒介
系统加电或复位后,所有的CPU通常都从某个由CPU制造商预先安排的地址上取指令。而基于CPU构建的嵌入式系统通常都有某种类型的固态存储设备(比如ROM、EEPROM或FLASH等)被映射到这个预先安排的地址上。因此在系统加电后,CPU将首先执行Bootloader程序。
(3)Bootloader的启动过程分为单阶段和多阶段两种。通常多阶段的Bootloader能提供更为复杂的功能,以及更好的可移植性。
(4)Bootloader的操作模式。大多数Bootloader都包含两种不同的操作模式:“启动加载”模式和“下载”模式,这种区别仅对于开发人员才有意义。
• 启动加载模式:这种模式也称为“自主”模式。也就是Bootloader从目标机上的某个固态存储设备上将操作系统加载到RAM中运行,整个过程并没有用户的介入。这种模式是嵌入式产品发布时的通用模式。
• 下载模式:在这种模式下,目标机上的Bootloader将通过串口连接或网络连接等通信手段从主机(Host)下载文件,比如:下载内核映像和根文件系统映像等。从主机下载的文件通常首先被Bootloader保存到目标机的RAM中,然后再被Bootloader写到目标机上的FLASH类固态存储设备中。Bootloader的这种模系统是在更新时使用。工作于这种模式下的Bootloader通常都会向它的终端用户提供一个简单的命令行接口。
(5)Bootloader与主机之间进行文件传输所用的通信设备及协议,最常见的情况就是,目标机上的Bootloader通过串口与主机之间进行文件传输,传输协议通常是xmodem/ ymodem/zmodem协议中的一种。但是,串口传输的速度是有限的,因此通过以太网连接并借助TFTP协议来下载文件是个更好的选择。
Bootloader启动流程
Bootloader的启动流程一般分为两个阶段:stage1和stage2,下面分别对这两个阶段进行讲解:
(1)Bootloader的stage1
在stage1中Bootloader主要完成以下工作。
• 基本的硬件初始化,包括屏蔽所有的中断、设置CPU的速度和时钟频率、RAM初始化、初始化LED、关闭CPU内部指令和数据cache灯。
• 为加载stage2准备RAM空间,通常为了获得更快的执行速度,通常把stage2加载到RAM空间中来执行,因此必须为加载Bootloader的stage2准备好一段可用的RAM空间范围。
• 拷贝stage2到RAM中,在这里要确定两点:①stage2的可执行映像在固态存储设备的存放起始地址和终止地址;②RAM空间的起始地址。
• 设置堆栈指针sp,这是为执行stage2的C语言代码做好准备。
(2)Bootloader的stage2
在stage2中Bootloader主要完成以下工作。
• 用汇编语言跳转到main入口函数
由于stage2的代码通常用C语言来实现,目的是实现更复杂的功能和取得更好的代码可读性和可移植性。但是与普通C语言应用程序不同的是,在编译和链接Bootloader这样的程序时,不能使用glibc库中的任何支持函数。
• 初始化本阶段要使用到的硬件设备,包括初始化串口、初始化计时器等。在初始化这些设备之前、可以输出一些打印信息。
• 检测系统的内存映射,所谓内存映射就是指在整个4GB物理地址空间中有指出哪些地址范围被分配用来寻址系统的RAM单元。
• 加载内核映像和根文件系统映像,这里包括规划内存占用的布局和从Flash上拷贝数据。
• 设置内核的启动参数。
Bootloader的种类
嵌入式系统世界已经有各种各样的Bootloader,种类划分也有多种方式。除了按照处理器体系结构不同划分以外,还有功能复杂程度的不同。
首先区分一下“Bootloader”和“Monitor”的概念。严格来说,“Bootloader”只是引导设备并且执行主程序的固件;而“Monitor”还提供了更多的命令行接口,可以进行调试、读写内存、烧写Flash、配置环境变量等。“Monitor”在嵌入式系统开发过程中可以提供很好的调试功能,开发完成以后,就完全设置成了一个“Bootloader”。所以,习惯上大家把它们统称为Bootloader。
下表列出了Linux的开放源码引导程序及其支持的体系结构。表中给出了X86、ARM、PowerPC体系结构的常用引导程序,并且注明了每一种引导程序是不是“Monitor”。
| Bootloader |
Monitor |
描 述 |
X86 |
ARM |
PowerPC |
| LILO |
否 |
Linux磁盘引导程序 |
是 |
否 |
否 |
| GRUB |
否 |
GNU的LILO替代程序 |
是 |
否 |
否 |
| Loadlin |
否 |
从DOS引导Linux |
是 |
否 |
否 |
| ROLO |
否 |
从ROM引导Linux而不需要BIOS |
是 |
否 |
否 |
| Etherboot |
否 |
通过以太网卡启动Linux系统的固件 |
是 |
否 |
否 |
| LinuxBIOS |
否 |
完全替代BUIS的Linux引导程序 |
是 |
否 |
否 |
| BLOB |
否 |
LART等硬件平台的引导程序 |
否 |
是 |
否 |
| U-Boot |
是 |
通用引导程序 |
是 |
是 |
是 |
| RedBoot |
是 |
基于eCos的引导程序 |
是 |
是 |
是 |
对于每种体系结构,都有一系列开放源码Bootloader可以选用。
(1)X86
X86的工作站和服务器上一般使用LILO和GRUB。LILO是Linux发行版主流的Bootloader。不过Redhat Linux发行版已经使用了GRUB,GRUB比LILO有更友好的显示接口,使用配置也更加灵活方便。
在某些X86嵌入式单板机或者特殊设备上,会采用其他的Bootloader,如ROLO。这些Bootloader可以取代BIOS的功能,能够从Flash中直接引导Linux启动。现在ROLO支持的开发板已经并入U-Boot,所以U-Boot也可以支持X86平台。
(2)ARM
ARM处理器的芯片商很多,所以每种芯片的开发板都有自己的Bootloader。结果ARM Bootloader也变得多种多样。最早有为ARM720处理器的开发板的固件,又有了armboot,StrongARM平台的BLOB,还有S3C2410处理器开发板上的vivi等。现在armboot已经并入了U-Boot,所以U-Boot也支持ARM/XSCALE平台。U-Boot已经成为ARM平台事实上的标准Bootloader。
(3)PowerPC
PowerPC平台的处理器有标准的Bootloader,就是PPCBOOT。PPCBOOT在合并armboot等之后,创建了U-Boot,成为各种体系结构开发板的通用引导程序。U-Boot仍然是PowerPC平台的主要Bootloader。
(4)MIPS
MIPS公司开发的YAMON是标准的Bootloader,也有许多MIPS芯片商为自己的开发板写了Bootloader。现在,U-Boot也已经支持MIPS平台。
(5)SH
SH平台的标准Bootloader是sh-boot。RedBoot在这种平台上也很好用。
(6)M68K
M68K平台没有标准的Bootloader。RedBoot能够支持M68K系列的系统。
值得说明的是RedBoot,它几乎能够支持所有的体系结构,包括MIPS、SH、M68K等。RedBoot是以eCos为基础,采用GPL许可的开源软件工程。现在由core eCos的开发人员维护,源码下载网站是
http://www.ecoscentric.com/snapshots。RedBoot的文档也相当完善,有详细的使用手册《RedBoot User’s Guide》。
U-Boot概述
U-Boot(UniversalBootloader),是遵循GPL条款的开放源码项目。它是从FADSROM、8xxROM、PPCBOOT逐步发展演化而来。其源码目录、编译形式与Linux内核很相似,事实上,不少U-Boot源码就是相应的Linux内核源程序的简化,尤其是一些设备的驱动程序,这从U-Boot源码的注释中能体现这一点。但是U-Boot不仅仅支持嵌入式Linux系统的引导,而且还支持NetBSD、VxWorks、QNX、RTEMS、ARTOS、LynxOS嵌入式操作系统。其目前要支持的目标操作系统是OpenBSD、NetBSD、FreeBSD、4.4BSD、Linux、SVR4、Esix、Solaris、Irix、SCO、Dell、NCR、VxWorks,LynxOS、pSOS、QNX、RTEMS、ARTOS。这是U-Boot中Universal的一层含义,另外一层含义则是U-Boot除了支持PowerPC系列的处理器外,还能支持MIPS、x86、ARM、NIOS、XScale等诸多常用系列的处理器。这两个特点正是U-Boot项目的开发目标,即支持尽可能多的嵌入式处理器和嵌入式操作系统。就目前为止,U-Boot对PowerPC系列处理器支持最为丰富,对Linux的支持最完善。
U-Boot的特点如下。
• 开放源码;
• 支持多种嵌入式操作系统内核,如Linux、NetBSD、VxWorks、QNX、RTEMS、ARTOS、LynxOS;
• 支持多个处理器系列,如PowerPC、ARM、x86、MIPS、XScale;
• 较高的可靠性和稳定性;
• 高度灵活的功能设置,适合U-Boot调试,操作系统不同引导要求,产品发布等;
• 丰富的设备驱动源码,如串口、以太网、SDRAM、FLASH、LCD、NVRAM、EEPROM、RTC、键盘等;
• 较为丰富的开发调试文档与强大的网络技术支持。
U-Boot可支持的主要功能列表。
• 系统引导:支持NFS挂载、RAMDISK(压缩或非压缩)形式的根文件系统。支持NFS挂载,并从FLASH中引导压缩或非压缩系统内核。
• 基本辅助功能:强大的操作系统接口功能;可灵活设置、传递多个关键参数给操作系统,适合系统在不同开发阶段的调试要求与产品发布,尤其对Linux支持最为强劲;支持目标板环境参数多种存储方式,如FLASH、NVRAM、EEPROM;CRC32校验,可校验FLASH中内核、RAMDISK镜像文件是否完好。
• 设备驱动:串口、SDRAM、FLASH、以太网、LCD、NVRAM、EEPROM、键盘、USB、PCMCIA、PCI、RTC等驱动支持。
• 上电自检功能:SDRAM、FLASH大小自动检测;SDRAM故障检测;CPU型号。
• 特殊功能:XIP内核引导。
U-Boot的常用命令
U-Boot上电启动后,按任意键可以退出自动启动状态,进入命令行。
U-Boot 2020.01-stm32mp-r1 (Aug 05 2020 - 05:32:37 +0000)
CPU: STM32MP157AAA Rev.B
Model: HQYJ FS-MP1A Discovery Board
Board: stm32mp1 in trusted mode (st,stm32mp157a-fsmp1a)
DRAM: 512 MiB
Clocks:
- MPU : 650 MHz
- MCU : 208.878 MHz
- AXI : 266.500 MHz
- PER : 24 MHz
- DDR : 533 MHz
WDT: Started with servicing (32s timeout)
NAND: 0 MiB
MMC: STM32 SD/MMC: 0, STM32 SD/MMC: 1
Loading Environment from MMC... OK
In: serial
Out: serial
Err: serial
Net: eth0: ethernet@5800a000
Hit any key to stop autoboot: 0
STM32MP>
在命令行提示符下,可以输入U-Boot的命令并执行。U-Boot可以支持几十个常用命令,通过这些命令,可以对开发板进行调试,可以引导Linux内核,还可以擦写Flash完成系统部署等功能。掌握这些命令的使用,才能够顺利地进行嵌入式系统的开发。
输入help命令,可以得到当前U-Boot的所有命令列表。每一条命令后面是简单的命令说明。
STM32MP> help
? - alias for 'help'
adc - ADC sub-system
base - print or set address offset
bdinfo - print Board Info structure
blkcache- block cache diagnostics and control
bmp - manipulate BMP image data
bootefi - Boots an EFI payload from memory
bootm - boot application image from memory
bootp - boot image via network using BOOTP/TFTP protocol
bootz - boot Linux zImage image from memory
chpart - change active partition
clk - CLK sub-system
cls - clear screen
cmp - memory compare
coninfo - print console devices and information
cp - memory copy
crc32 - checksum calculation
date - get/set/reset date & time
dcache - enable or disable data cache
dfu - Device Firmware Upgrade
dhcp - boot image via network using DHCP/TFTP protocol
dm - Driver model low level access
dtimg - manipulate dtb/dtbo Android image
echo - echo args to console
editenv - edit environment variable
env - environment handling commands
erase - erase FLASH memory
exit - exit script
ext2load- load binary file from a Ext2 filesystem
ext2ls - list files in a directory (default /)
ext4load- load binary file from a Ext4 filesystem
ext4ls - list files in a directory (default /)
ext4size- determine a file's size
ext4write- create a file in the root directory
false - do nothing, unsuccessfully
fastboot- run as a fastboot usb or udp device
fatinfo - print information about filesystem
fatload - load binary file from a dos filesystem
fatls - list files in a directory (default /)
fatsize - determine a file's size
fdt - flattened device tree utility commands
flinfo - print FLASH memory information
fstype - Look up a filesystem type
fuse - Fuse sub-system
go - start application at address 'addr'
gpio - query and control gpio pins
gpt - GUID Partition Table
help - print command description/usage
i2c - I2C sub-system
icache - enable or disable instruction cache
itest - return true/false on integer compare
lcdputs - print string on video framebuffer
led - manage LEDs
load - load binary file from a filesystem
loadb - load binary file over serial line (kermit mode)
loads - load S-Record file over serial line
loadx - load binary file over serial line (xmodem mode)
loady - load binary file over serial line (ymodem mode)
loop - infinite loop on address range
ls - list files in a directory (default /)
md - memory display
mdio - MDIO utility commands
meminfo - display memory information
mii - MII utility commands
mm - memory modify (auto-incrementing address)
mmc - MMC sub system
mmcinfo - display MMC info
mtdparts- define flash/nand partitions
mtest - simple RAM read/write test
mw - memory write (fill)
nand - NAND sub-system
nboot - boot from NAND device
nfs - boot image via network using NFS protocol
nm - memory modify (constant address)
part - disk partition related commands
ping - send ICMP ECHO_REQUEST to network host
pinmux - show pin-controller muxing
pmic - PMIC sub-system
poweroff- Perform POWEROFF of the device
printenv- print environment variables
protect - enable or disable FLASH write protection
pxe - commands to get and boot from pxe files
regulator- uclass operations
reset - Perform RESET of the CPU
rproc - Control operation of remote processors in an SoC
run - run commands in an environment variable
save - save file to a filesystem
saveenv - save environment variables to persistent storage
setcurs - set cursor position within screen
setenv - set environment variables
setexpr - set environment variable as the result of eval expression
sf - SPI flash sub-system
showvar - print local hushshell variables
size - determine a file's size
sleep - delay execution for some time
source - run script from memory
sspi - SPI utility command
stboard - read/write board reference in OTP
stm32key- Fuse ST Hash key
stm32prog-
start communication with tools STM32Cubeprogrammer on with Flashlayout at
sysboot - command to get and boot from syslinux files
test - minimal test like /bin/sh
tftpboot- boot image via network using TFTP protocol
time - run commands and summarize execution time
timer - access the system timer
true - do nothing, successfully
ubi - ubi commands
ubifsload- load file from an UBIFS filesystem
ubifsls - list files in a directory
ubifsmount- mount UBIFS volume
ubifsumount- unmount UBIFS volume
ums - Use the UMS [USB Mass Storage]
usb - USB sub-system
usbboot - boot from USB device
version - print monitor, compiler and linker version
STM32MP>
U-Boot还提供了更加详细的命令帮助,通过help命令还可以查看每个命令的参数说明。由于开发过程的需要,有必要先把U-Boot命令的用法弄清楚。
实验目的
熟悉交叉工具链的使用、u-boot常用命令、u-boot的代码结构和移植方法。
实验平台
华清远见开发环境,FS-MP1A平台
实验步骤
本实验基于u-boot 2020.01版本,然后添加意法半导体提供的补丁文件。在意法半导体官方的u-boot中移植我们自己的u-boot。
导入源码
建立源码目录
linux@ubuntu:$ cd ~
linux@ubuntu:$ mkdir FS-MP1A
将【华清远见-FS-MP1A开发资料\02-程序源码\04-Linux系统移植\01-官方源码】下的
en.SOURCES-stm32mp1-openstlinux-5-4-dunfell-mp1-20-06-24.tar.xz压缩包,导入到ubuntu下的${HOME}/FS-MP1A目录下。
![]()
解压缩源码包
linux@ubuntu:$ tar xvf en.SOURCES-stm32mp1-openstlinux-5-4-dunfell-mp1-20-06-24.tar.xz
解压完成后得到“
stm32mp1-openstlinux-5.4-dunfell-mp1-20-06-24”目录

进入uboot目录下
linux@ubuntu:$ cd ~/FS-MP1A/stm32mp1-openstlinux-5.4-dunfell-mp1-20-06-24/sources/arm-ostl-linux-gnueabi/u-boot-stm32mp-2020.01-r0

该目录下以patch结尾的文件为ST官方提供的补丁文件;
u-boot-stm32mp-2020.01-r0.tar.gz为标准u-boot源码包。
解压标准u-boot源码包
linux@ubuntu:$ tar -xvf u-boot-stm32mp-2020.01-r0.tar.gz
解压完成后得到u-boot-stm32mp-2020.01目录

进入u-boot源码目录下:
linux@ubuntu:$ cd u-boot-stm32mp-2020.01

将ST官方补丁文件打到u-boot源码中:
linux@ubuntu:$ for p in `ls -1 ../*.patch`; do patch -p1 < $p; done

TF卡分区
要对TF卡进行烧录,需要先将TF接入到ubuntu系统中。
查看TF卡分区
linux@ubuntu:$ ls /dev/sd*
![]()
由上图所示只有“/dev/sdb1”一个分区则需要重新进行分区。
首先删除原有分区
linux@ubuntu:$ sudo parted -s /dev/sdb mklabel msdos
如果显示如下内容,则表示设备已经被挂载,需要卸载掉设备再删除分区。
![]()
卸载设备
linux@ubuntu:$ umount /dev/sdb1
卸载完成后重新执行删除分区命令
linux@ubuntu:$ sudo parted -s /dev/sdb mklabel msdos
对tf进行重新分区
linux@ubuntu:$ sudo sgdisk --resize-table=128 -a 1 -n 1:34:545 -c 1:fsbl1 -n 2:546:1057 -c 2:fsbl2 -n 3:1058:5153 -c 3:ssbl -n 4:5154:136225 -c 4:bootfs -n 5:136226 -c 5:rootfs -A 4:set:2 -p /dev/sdb -g
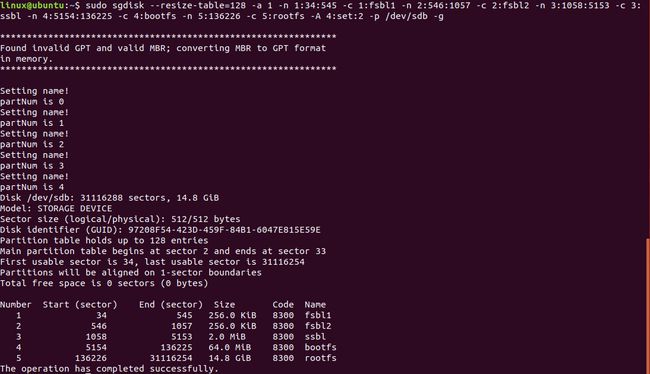
注意:最后-p /dev/sdb参数中的/dev/sdb需要按照实际ubuntu中的tf节点为准,否则可能发生不可预料的后果。
建立自己的平台
- 配置工具链
导入交叉编译工具链(如果还未安装SDK可参考《SDK工具链安装》章节进行安装)
linux@ubuntu:$ source /opt/st/stm32mp1/3.1-openstlinux-5.4-dunfell-mp1-20-06-24/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
验证开发工具是否安装正确,显示版本信息如下图所示。
linux@ubuntu:$ $CC --version

- 增加板级相关文件
进入到u-boot源码目录
linux@ubuntu:$ cd ~/FS-MP1A/stm32mp1-openstlinux-5.4-dunfell-mp1-20-06-24/sources/arm-ostl-linux-gnueabi/u-boot-stm32mp-2020.01-r0/u-boot-stm32mp-2020.01/
添加自己的默认配置文件
linux@ubuntu:$ cp configs/stm32mp15_basic_defconfig configs/stm32mp15_fsmp1a_basic_defconfig
添加设备树文件
linux@ubuntu:$ cp arch/arm/dts/stm32mp15xx-dkx.dtsi arch/arm/dts/stm32mp15xx-fsmp1x.dtsi
linux@ubuntu:$ cp arch/arm/dts/stm32mp157a-dk1.dts arch/arm/dts/stm32mp157a-fsmp1a.dts
linux@ubuntu:$ cp arch/arm/dts/stm32mp157a-dk1-u-boot.dtsi arch/arm/dts/stm32mp157a-fsmp1a-u-boot.dtsi
修改
arch/arm/dts/stm32mp157a-fsmp1a.dts将
#include "stm32mp15xx-dkx.dtsi"
修改为
#include "stm32mp15xx-fsmp1x.dtsi"
修改arch/arm/dts/Makefile,在stm32mp157a-dk1.dtb下添加stm32mp157a-fsmp1a的内容:

- 配置u-boot
使用新添加的默认配置:
linux@ubuntu:$ make stm32mp15_fsmp1a_basic_defconfig

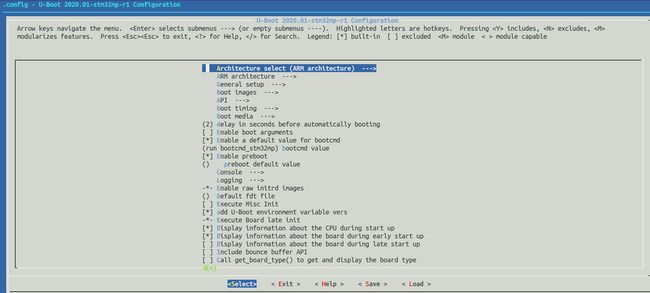
可以使用make menuconfig进行图形化配置
- 编译源码
执行如下指令编译u-boot:
linux@ubuntu:$ make DEVICE_TREE=stm32mp157a-fsmp1a all
编译成功后,最后显示内容(部分截图)如下:

编译完成后会得到如下文件:

- 固件烧写
由于在移植过程中会多次烧写固件并且会导致正常u-boot无法启动,因此推荐使用TF卡启动的方式来验证。
将TF接入ubuntu系统后,查看TF卡分区
linux@ubuntu:$ ls /dev/sd*
![]()
/dev/sdb为TF卡设备。如果该设备下只有/dev/sdb1一个分区则重新分区。
执行如下指令烧写u-boot:
linux@ubuntu:$ sudo dd if=u-boot-spl.stm32 of=/dev/sdb1 conv=fdatasync
linux@ubuntu:$ sudo dd if=u-boot-spl.stm32 of=/dev/sdb2 conv=fdatasync
linux@ubuntu:$ sudo dd if=u-boot.img of=/dev/sdb3 conv=fdatasync
- 启动开发板
将拨码开关设置为SD卡启动方式:
| Boot mode |
BOOT2 |
BOOT1 |
BOOT0 |
| Engineering boot |
1 |
0 |
0 |
| Forced USB bootfor flashing |
0 |
0 |
0 |
| eMMC |
0 |
1 |
0 |
| SDCARD |
1 |
0 |
1 |
将制作好的TF卡插入开发板,上电后会出现如下错误提示:

错误提示电源初始化错误,需重新调整电源相关配置
调整设备树电源配置
由于官方参考板DK1采用电源管理芯片做电源管理,而FS-MP1A采用分离电路作为电源管理,本例需要将文件中原有电源管理芯片相关内容去掉,增加上固定电源相关内容
- 去掉原有电源管理内容
DK1参考板电源管理芯片挂在I2C4上,而FS-MP1A并未使用I2C4总线,所以直接将I2C4相关内容完全删除即可。
修改
arch/arm/dts/stm32mp15xx-fsmp1x.dtsi文件
将文件中i2c4节点相关内容整体删除,删除内容如下:
&i2c4 {
pinctrl-names = "default", "sleep";
pinctrl-0 = <&i2c4_pins_a>;
pinctrl-1 = <&i2c4_pins_sleep_a>;
i2c-scl-rising-time-ns = <185>;
i2c-scl-falling-time-ns = <20>;
clock-frequency = <400000>;
status = "disabled";
/*内容太长此处省略*/
watchdog {
compatible = "st,stpmic1-wdt";
status = "disabled";
};
};
};
修改
arch/arm/dts/stm32mp15xx-fsmp1x.dtsi文件,删除如下内容:
&cpu0{
cpu-supply = <&vddcore>;
};
&cpu1{
cpu-supply = <&vddcore>;
};
修改
arch/arm/dts/stm32mp157a-fsmp1a-u-boot.dtsi
文件
删除如下内容:
&pmic {
u-boot,dm-pre-reloc;
};
由于官方参考板DK1 I2C4总线上有个USB type C的控制器,上文删除I2C4节点的同时将type C控制器的描述删除,所以需要将引用type C控制器的内容删掉。
修改
arch/arm/dts/stm32mp15xx-fsmp1x.dtsi文件,删除红色部分内容:
&usbotg_hs {
phys = <&usbphyc_port1 0>;
phy-names = "usb2-phy";
usb-role-switch;
status = "okay";
port {
usbotg_hs_ep: endpoint {
remote-endpoint = <&con_usbotg_hs_ep>;
};
};
};
- 添加固定电源配置
修改
arch/arm/dts/stm32mp15xx-fsmp1x.dtsi文件
固定电源配置通常添加在根节点下,在根节点末尾位置添加如下内容(红色字体为需要添加的内容):
vin: vin {
compatible = "regulator-fixed";
regulator-name = "vin";
regulator-min-microvolt = <5000000>;
regulator-max-microvolt = <5000000>;
regulator-always-on;
};
v3v3: regulator-3p3v {
compatible = "regulator-fixed";
regulator-name = "v3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
v1v8_audio: regulator-v1v8-audio {
compatible = "regulator-fixed";
regulator-name = "v1v8_audio";
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <1800000>;
regulator-always-on;
regulator-boot-on;
};
v3v3_hdmi: regulator-v3v3-hdmi {
compatible = "regulator-fixed";
regulator-name = "v3v3_hdmi";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
v1v2_hdmi: regulator-v1v2-hdmi {
compatible = "regulator-fixed";
regulator-name = "v1v2_hdmi";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1200000>;
regulator-always-on;
regulator-boot-on;
};
vdd: regulator-vdd {
compatible = "regulator-fixed";
regulator-name = "vdd";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
vdd_usb: regulator-vdd-usb {
compatible = "regulator-fixed";
regulator-name = "vdd_usb";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
};
- 配置uboot
linux@ubuntu:$ make menuconfig
去掉PMIC的配置选项,按空格将方括号内*号去掉:
Device Drivers --->
Power --->
[ ] Enable support for STMicroelectronics STPMIC1 PMIC
- 更新配置文件
linux@ubuntu:$ cp .config configs/stm32mp15_fsmp1a_basic_defconfig
- 重新编译源码
linux@ubuntu:$ make DEVICE_TREE=stm32mp157a-fsmp1a all
- 烧写后启动
重新烧写后启动现象如下:

提示显示TF卡未被检测到。
TF卡支持
系统检测TF卡拔插是通过CD脚的状态确认,通过原理图可知,TF卡对应MMC1的CD脚是与STM32MP1的PH3连接
![]()
对照设备树中MMC1的描述,发现设备树种原有CD脚的配置与FS-MP1A板子不一致,需调整为PH3。
修改
arch/arm/dts/stm32mp15xx-fsmp1x.dtsi文件,调整MMC1中CD的配置:
将如下内容
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
cd-gpios = <&gpiob 7 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;
disable-wp;
st,neg-edge;
bus-width = <4>;
vmmc-supply = <&v3v3>;
status = "okay";
};
修改为
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
cd-gpios = <&gpioh 3 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;
disable-wp;
st,neg-edge;
bus-width = <4>;
vmmc-supply = <&v3v3>;
status = "okay";
};
重新编译烧写后现象如下:

去掉ADC功能
上一小节已经成功启动到了u-boot的控制终端,但是可以看到还有一些错误。本小节将解决如下错误。

官方参考板DK1通过ADC检测开机电流,如果供电电流不足3A则启动失败,FS-MP1A没有设计这个功能,所以需要去掉这部分功能,否则就会报上图中显示的错误,由于u-boot期间ADC主要功能是检测开机电流,这里直接去掉ADC功能即可。
配置uboot去掉ADC功能:按空格键去掉[ ]的星号
linux@ubuntu:$ make menuconfig
Command line interface --->
Device access commands --->
[ ] adc - Access Analog to Digital Converters info and data
Device Drivers --->
[ ] Enable ADC drivers using Driver Model
更新配置文件
linux@ubuntu:$ cp .config configs/stm32mp15_fsmp1a_basic_defconfig
重新编译烧写后adc相关错误已经没有了。

关闭ltdc
由于在u-boot阶段我们不使用显示设备,因此需要将ltdc相关配置关闭。
修改
arch/arm/dts/stm32mp15xx-fsmp1x.dtsi文件
pinctrl-names = "default", "sleep"; pinctrl-0 = < pinctrl-1 = < status = "okay"; port { #address-cells = <1>; #size-cells = <0>; ltdc_ep0_out: endpoint@0 { reg = <0>; remote-endpoint = <&sii9022_in>; }; }; }; 修改为 pinctrl-names = "default", "sleep"; pinctrl-0 = < pinctrl-1 = < status = "disabled"; port { #address-cells = <1>; #size-cells = <0>; ltdc_ep0_out: endpoint@0 { reg = <0>; remote-endpoint = <&sii9022_in>; }; }; }; 然后重新编译烧写 启动设备进入u-boot控制台之后,可以发现启动信息中有网卡未被发现的错误信息,这个错误是由于u-boot没有设置正确的MAC地址,由启动信息可以看到,启动后网卡的MAC为00:00:00:00:00:00。这是由于在OTP中没有固化默认的MAC地址,解决这个问题可以通过烧写OTP配置来进行默认MAC地址配置,但是由于操作OTP配置的风险较高,如果操作不当可能会导致不可预料的结果。 如果u-boot期间不使用网卡这个错误可以忽略。 如果需要使用网卡解决这个问题比较简单的方法有两个: STM32MP> env set -f ethaddr 1A:1F:DB:0E:69:FD 这种方式设置完成后即刻生效,重启后网卡即可正常工作。 修改如下内容: #define CONFIG_EXTRA_ENV_SETTINGS \ "bootdelay=1\0" \ "kernel_addr_r=0xc2000000\0" \ "fdt_addr_r=0xc4000000\0" \ "scriptaddr=0xc4100000\0" \ 为: #define CONFIG_EXTRA_ENV_SETTINGS \ "bootdelay=1\0" \ "ethaddr=00:80:E1:42:60:17\0" \ "kernel_addr_r=0xc2000000\0" \ "fdt_addr_r=0xc4000000\0" \ "scriptaddr=0xc4100000\0" \ 这种方式需重新编译烧写后才能生效。 重新编译烧写后网卡即可正常工作: 将网线插入开发板中可以进行网络测试。 使用dhcp命令获取ip地址: STM32MP> dhcp 可以看到这里获取到的ip地址为192.168.11.81 Ping网关测试: Board $> ping 192.168.11.1 Ping外网测试: Board $> ping 8.8.8.8 参考原理图可知eMMC使用的是SDMMC2总线,当前所使用的设备树文件中没有SDMMC2的支持,所以需要增加相关内容才能正常驱动eMMC。 由于在使STM32MP1芯片很多管脚为多功能复用管脚,且很多管脚具备同样的功能,所以移植eMMC时需要确认硬件设计是使用的是那些管脚,根据原理图确认后管脚对应关系为: 原理图网络编号 对应管脚 管脚功能 管脚功能码 SD2_DATA0 PB14 SDMMC2_D0 AF9 SD2_DATA1 PB15 SDMMC2_D1 AF9 SD2_DATA2 PB3 SDMMC2_D2 AF9 SD2_DATA3 PB4 SDMMC2_D3 AF9 SD2_DATA4 PA8 SDMMC2_D4 AF9 SD2_DATA5 PA9 SDMMC2_D5 AF10 SD2_DATA6 PE5 SDMMC2_D6 AF9 SD2_DATA7 PD3 SDMMC2_D7 AF9 SD2_CLK PE3 SDMMC2_CK AF9 SD2_CMD PG6 SDMMC2_CMD AF10 在u-boot中STM32MP1默认管脚定义在文件 查看后确认有SDMMC2的管脚定义,且与FS-MP1A硬件使用情况一致,定义如下: sdmmc2_b4_pins_a: sdmmc2-b4-0 { pins1 { pinmux = slew-rate = <1>; drive-push-pull; bias-pull-up; }; pins2 { pinmux = slew-rate = <2>; drive-push-pull; bias-pull-up; }; }; sdmmc2_b4_od_pins_a: sdmmc2-b4-od-0 { pins1 { pinmux = slew-rate = <1>; drive-push-pull; bias-pull-up; }; pins2 { pinmux = slew-rate = <2>; drive-push-pull; bias-pull-up; }; pins3 { pinmux = slew-rate = <1>; drive-open-drain; bias-pull-up; }; }; sdmmc2_b4_sleep_pins_a: sdmmc2-b4-sleep-0 { pins { pinmux = }; }; sdmmc2_b4_pins_b: sdmmc2-b4-1 { pins1 { pinmux = slew-rate = <1>; drive-push-pull; bias-disable; }; pins2 { pinmux = slew-rate = <2>; drive-push-pull; bias-disable; }; }; sdmmc2_b4_od_pins_b: sdmmc2-b4-od-1 { pins1 { pinmux = slew-rate = <1>; drive-push-pull; bias-disable; }; pins2 { pinmux = slew-rate = <2>; drive-push-pull; bias-disable; }; pins3 { pinmux = slew-rate = <1>; drive-open-drain; bias-disable; }; }; sdmmc2_d47_pins_a: sdmmc2-d47-0 { pins { pinmux = slew-rate = <1>; drive-push-pull; bias-pull-up; }; }; sdmmc2_d47_sleep_pins_a: sdmmc2-d47-sleep-0 { pins { pinmux = }; }; 修改 在原有sdmmc1节点下增加sdmmc2的内容,添加内容可参考 &sdmmc2 { pinctrl-names = "default", "opendrain", "sleep"; pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_d47_pins_a>; pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_d47_pins_a>; pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_d47_sleep_pins_a>; non-removable; no-sd; no-sdio; st,neg-edge; bus-width = <8>; vmmc-supply = <&v3v3>; vqmmc-supply = <&vdd>; mmc-ddr-3_3v; status = "okay"; }; 修改 修改如下内容: aliases { i2c3 = &i2c4; mmc0 = &sdmmc1; usb0 = &usbotg_hs; }; 修改为(红色字体为增加内容): aliases { i2c3 = &i2c4; mmc0 = &sdmmc1; mmc1 = &sdmmc2; usb0 = &usbotg_hs; }; 在sdmmc1节点后sdmmc2的内容(红色字体部分为添加内容): &sdmmc1 { u-boot,dm-spl; }; &sdmmc2 { u-boot,dm-spl; }; 重新编译烧写后启动信息对比前文多一个MMC: eMMC的验证需要通过linux更新,相关操作可参考《通过linux更新eMMC中的u-boot》章节。 前面我们做的相关配置都是基于basic的配置,而实际FS-MP1A使用的uboot是基于Trusted配置的镜像,后边的《Trusted Firmware-A移植》章节会使用到Trusted镜像。 linux@ubuntu:$ cp configs/stm32mp15_trusted_defconfig configs/stm32mp15_fsmp1a_trusted _defconfig linux@ubuntu:$ make stm32mp15_fsmp1a_trusted_defconfig linux@ubuntu:$ make menuconfig Device Drivers ---> Power ---> [ ] Enable support for STMicroelectronics STPMIC1 PMIC linux@ubuntu:$ make menuconfig Command line interface ---> Device access commands ---> [ ] adc - Access Analog to Digital Converters info and data Device Drivers ---> [ ] Enable ADC drivers using Driver Model linux@ubuntu:$ cp .config configs/stm32mp15_fsmp1a_trusted_defconfig UBOOT_CONFIGS ?= stm32mp15_fsmp1a_trusted_defconfig,trusted,u-boot.stm32 stm32mp15_trusted_defconfig,trusted,u-boot.stm32 stm32mp15_trusted_defconfig,optee,u-boot.stm32 stm32mp15_basic_defconfig,basic,u-boot.img DEVICE_TREE ?= stm32mp157a-fsmp1a stm32mp157a-dk1 stm32mp157d-dk1 stm32mp157c-dk2 stm32mp157f-dk2 stm32mp157c-ed1 stm32mp157f-ed1 stm32mp157a-ev1 stm32mp157c-ev1 stm32mp157d-ev1 stm32mp157f-ev1 linux@ubuntu:$ make distclean linux@ubuntu:$ make -f $PWD/../Makefile.sdk all UBOOT_CONFIGS=stm32mp15_fsmp1a_trusted_defconfig,trusted,u-boot.stm32 linux@ubuntu:$ cd ../ build-trusted linux@ubuntu:$ ls有线网卡配置




eMMC移植

arch/arm/dts/stm32mp15-pinctrl.dtsi中,查看文件中是否有需要的管脚定义:
arch/arm/dts/stm32mp15xx-fsmp1x.dtsi增加SDMMC2的信息
arch/arm/dts/stm32mp15xx-edx.dtsi中sdmmc2的写法,内容如下:
arch/arm/dts/stm32mp157a-fsmp1a-u-boot.dtsi文件,调整启动通道。

生成Trusted镜像


u-boot-stm32mp157a-fsmp1a-trusted.stm32即为我们后续会使用的镜像文件。