路径规划学习笔记
第一章 环境配置
1 Ubuntu16.04安装ROS Kinetic(20220315亲测可行)
1.1 配置Ubuntu软件仓库
打开Ubuntu Software

选择Software & Updates

设置仓库更新
修改镜像源为清华大学

1.2 设置 sources.list
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
1.3 设置秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
1.4 安装
更新软件包
sudo apt-get update
安装完整版(若长时间不动,可 Ctrl+c 停止,重新开始)
sudo apt-get install ros-kinetic-desktop-full
1.5 初始化和更新rosdep
sudo rosdep init
如果初始化报错
sudo gedit /etc/hosts
在弹出的框中,回车添加以下内容名,并保存
199.232.28.133 raw.githubusercontent.com
初始化成功后,更新rosdep
rosdep update
若出现错误,则使用rosdepc
sudo pip install rosdepc(若不行试试sudo pip3 install rosdepc)
还是不行则
sudo apt-get install python3-pipsudo pip install rosdepc
安装完成后,则可初始化和更新
sudo rosdepc initrosdepc update
1.6 环境配置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
1.7 构建工厂依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
1.8 检验是否安装成功
roswtf
可以看到 0 warning , 0 fault
到此环境配置成功
2 作业总结
2.1 下载并解压课程包hw_1
2.2 创建工作空间
Ctrl+Alt+T,开启终端,在home目录下创建工作路径,并打开创建的工作路径
// mkdir filename 创建一个文件夹
// mkdir -p ~/filename1/filename2 这里需要创建一个工作路径,故用该命令
mkdir -p ~/catkin_ws/src
打开创建的路径(Tab键命令补齐,Ctrl+c终止程序,Ctrl+d退出终端,Ctrl+l清屏)
// cd ~/filename1/filename2 打开文件夹
cd ~/catkin_ws/src/
复制压缩包hw_1/src里的三个文件夹(功能包)到创建的路径下
# sudo mv filename target_work_path 移动一个文件夹到另一个文件夹
# sudo cp -r filename target_work_path 移动一个文件夹到另一个文件夹
# 当前工作路径应是要移动的文件夹所在路径
sudo cp -r grid_path_searcher ~/catkin_ws/src
sudo cp -r rviz_plugins ~/catkin_ws/src
sudo cp -r waypoint_generator ~/catkin_ws/src
终端执行以下命令
//生成CMakeList.txt,将上述复制的三个文件夹看做员工,则新生成的txt看做是员工表
catkin_init_workspace
cd ~/catkin_ws/
//编译上述三个功能包,生成两个文件夹:devel(执行文件)、build(编译文件)
catkin_make
//告诉ROS工作空间路径
source devel/setup.bash
2.3 打开 rviz
//启动ROS自带的节点
roscore
Ctrl+Alt+t,开启一个新终端(Ctrl+Shift+t),执行以下命令
//告诉ROS工作空间路径
cd ~/catkin_ws/
source devel/setup.bash
// 如果,没有以上两条,可能会出错
rviz
出现 rviz 初始界面

2.4 打开 rviz 配置文件
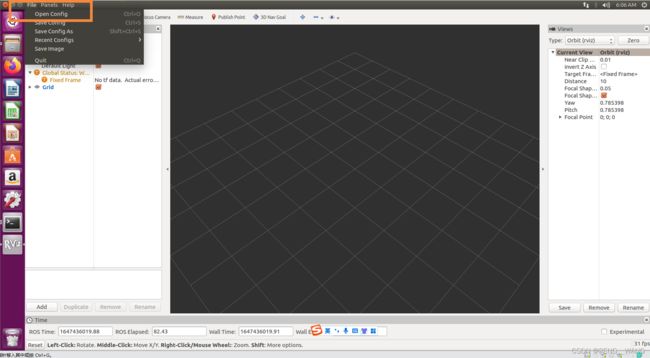
open config 配置文件路径为
~/catkin_ws/src/grid_path_searcher/launch/rviz_config/demo.rviz
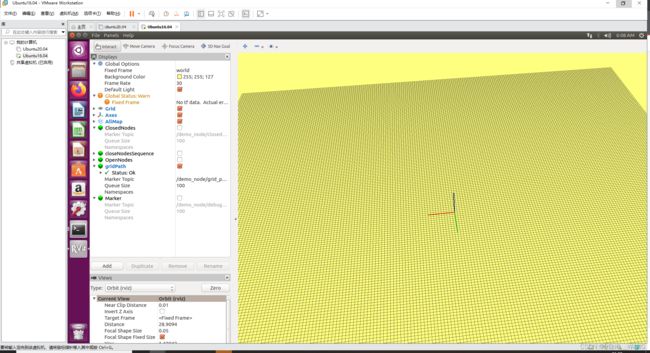
得到以下画面
2.5 配置 rviz 插件
点击“+”,添加 Goal3DTool插件
点击“-”,删除 2D Nav Goal 和 2D Pose Estimate

2.6 载入地图
Ctrl+Alt+t,开启一个新终端,执行以下命令
//告诉ROS工作空间路径
cd ~/catkin_ws/
source devel/setup.bash
//运行src中第一个功能包的demo.lanch文件,导入地图
roslaunch grid_path_searcher demo.launch
可以看到 rviz 自动载入了点云地图

点击3D New Goal,在此地图中按住左键鼠标,出现绿色箭头,移动鼠标用于调整箭头方向,再 按住鼠标右键,移动鼠标调整箭头的高度,最后松开鼠标左右键,能够看到 在 3 维地图中规划出的一条从终点到达地图中心的一条路径。绿色的为Astar规划出的路径,红的的为JPS规划的路径。
最后一个终端可以看到打印数据。
出现问题可以从创建文件夹开始再试一次,有意想不到的效果。
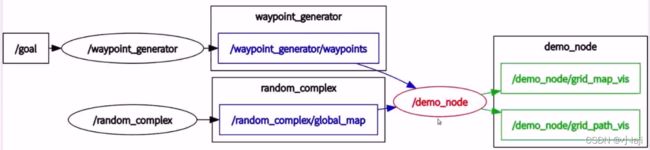
2.7 rqt_graph工具使用
显示ROS此时有哪些节点node(椭圆形)在工作,发布了哪些话题topic(方形)。
/goal 生成起点
/random_complex 生成随机地图和终点
/demo_node 获取 /goal 和 /random_complex 生成的信息
/demo_node/grid_map_vis 在rviz中显示地图
/demo_node/grid_path_vis 在rviz中显示路径点
第二章
1 图搜索基础
工作空间:
配置空间:
膨胀检测:
图由节点和边构成,可分为有向图、无向图和权重图。
图搜索算法框架
- 维护两个容器,一个容器存放将访问的节点,一个存放已访问的节点
- 访问容器首先存放的是起点节点
- 循环
- 访问:从访问容器中根据某种规则弹出一个节点(对于Astar是 f(n) 值最小的节点)
- 扩展:扩展当前节点的所有邻居节点
- 装入容器:将所有邻居装入到访问容器中
- 结束循坏:访问到目标节点或容器中无节点弹出
广度优先搜索BFS:先进先出
深度优先DFS:后进先出
贪心算法:用一个函数估计当前点到终点的距离
2 Astar算法
在图搜索算法中,若在搜索的每一步都利用估价函数 f(n) = g(n) + h(n) 对容器中的节点进行排序,则该算法为Astar算法。Astar算法是一种图搜索算法,在图中求最短路径的搜索方法。
Astar算法的估价函数:f(n) = g(n) + h(n)
f(n):总搜索代价
g(n):起点到当前节点 n 的代价和
h(n):启发函数,当前节点 n 到目标节点的实际距离的猜测,指引搜索的正确方向。
欧几里得启发函数:![]()
曼哈顿启发函数:![]()
Astar算法伪代码
- 维护容器,这个容器桨扩展的点按从小到大的顺序进行排列
- 将起始节点 A 放入这个容器
- 定义 g(A)=0, g(n)= ∞
- 循环
- if 容器是空,return False; break
- 从容器中弹出 f 值最小的节点 n
- 把这个节点 n 放到另一个放到被访问节点的容器
- if 节点 n 是目标节点,return True; break
- 扩展节点 n 的所有邻居节点 m
- if g(m)=∞(即节点 m 未被扩展过)
- g(m)=g(n)+Cnm(Cnm为节点 n 到节点 m 的距离)
- 将节点 m 放到容器中
- if g(m)>g(n)+Cnm(节点 m 被扩展过,此时需要更新 g(m) 值)
- g(m)=g(n)+Cnm
- 结束
- 结束循环