Datawhale-深入浅出pytorch简介安装和基础知识
目录
1.1 PyTorch简介
1.1.1 PyTorch的介绍
1.1.2 PyTorch的发展
1.1.3 PyTorch的优势
1.2 PyTorch的安装
1.2.1 Anaconda的安装
1.2.2 查看显卡
1.2.3 安装PyTorch
1.2.4 PyCharm安装(可选操作)
1.3 PyTorch相关资源
2.1 张量
2.1.1 简介
2.1.2 创建tensor
2.1.3 张量的操作
2.1.4 广播机制
2.2 自动求导
2.3 并行计算简介
2.3.1 为什么要做并行计算
2.3.2 为什么需要CUDA
2.3.3 常见的并行的方法:
1.1 PyTorch简介
1.1.1 PyTorch的介绍
PyTorch是由Facebook人工智能研究小组开发的一种基于Lua编写的Torch库的Python实现的深度学习库,目前被广泛应用于学术界和工业界,而随着Caffe2项目并入Pytorch, Pytorch开始影响到TensorFlow在深度学习应用框架领域的地位。总的来说,PyTorch是当前难得的简洁优雅且高效快速的框架。因此本课程我们选择了PyTorch来进行开源学习。
1.1.2 PyTorch的发展
“All in Pytorch”,对于PyTorch的发展我们只能用一句话来概况了,PyTorch自从提出就获得巨大的关注以及用户数量的剧增
总的来说,我们必须承认到现在为止PyTorch还是有不如别的框架的地方,但是框架只是给我们提供了轮子,让我们造汽车更加方便,最重要的还是我们个人的科学素养的提升。
1.1.3 PyTorch的优势
- 更加简洁,相比于其他的框架,PyTorch的框架更加简洁,易于理解。PyTorch的设计追求最少的封装,避免重复造轮子。
- 上手快,掌握numpy和基本的深度学习知识就可以上手。
- PyTorch有着良好的文档和社区支持,作者亲自维护的论坛供用户交流和求教问题。Facebook 人工智能研究院对PyTorch提供了强力支持,作为当今排名前三的深度学习研究机构,FAIR的支持足以确保PyTorch获得持续的开发更新。
- 项目开源,在Github上有越来越多的开源代码是使用PyTorch进行开发。
- 可以更好的调试代码,PyTorch可以让我们逐行执行我们的脚本。这就像调试NumPy一样 – 我们可以轻松访问代码中的所有对象,并且可以使用打印语句(或其他标准的Python调试)来查看方法失败的位置。
- 越来越完善的扩展库,活力旺盛,正处在当打之年。
1.2 PyTorch的安装
PyTorch的安装,一般常见的是Anaconda/miniconda+Pytorch+ (Pycharm) 的工具,我们的安装分为以下几步
- Anaconda的安装
- 检查有无NVIDIA GPU
- PyTorch的安装
- Pycharm的安装 ( Windows系统上更为常用)
1.2.1 Anaconda的安装
在DL和ML中,要用到大量成熟的package。一个个安装 package 很麻烦,而且容易出现奇奇怪怪的问题。而 Anaconda很好的解决了我们的问题,它集成了常用于科学分析(机器学习, 深度学习)的大量package。省略了我们安装一些package的过程。
Step 1:安装Anaconda/miniconda
登陆Anaconda | Individual Edition,选择相应系统DownLoad,此处以Windows为例:
Step 2:检验是否安装成功
在开始页找到Anaconda Prompt,一般在Anaconda3的文件夹下,( Linux在终端下就行了)
Step 3:创建虚拟环境
Linux在终端(Ctrl+Alt+T)进行,Windows在Anaconda Prompt进行
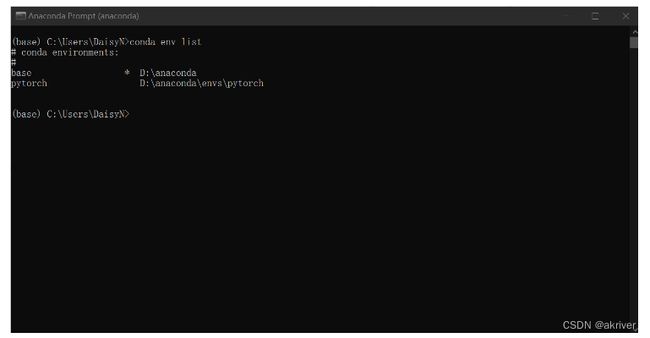
查看现存虚拟环境
查看已经安装好的虚拟环境,可以看到我们这里已经有两个环境存在了
conda env list
创建虚拟环境
在深度学习和机器学习中,我们经常会创建不同版本的虚拟环境来满足我们的一些需求。下面我们介绍创建虚拟环境的命令。
conda create -n env_name python==version

注:
- 这里忽略我们的warning,因为我们测试的时候已经安了又卸载一遍了,正常时是不会有warning的。
- 在选择Python版本时,不要选择太高,建议选择3.6-3.8,版本过高会导致相关库不适配。
删除虚拟环境命令
conda remove -n env_name --all
激活环境命令
conda activate env_name
退出当前环境
conda deactivate
Step 4:换源
在安装package时,我们经常会使用pip install package_name和conda install package_name 的命令,但是一些package下载速度会很慢,因此我们需要进行换源,换成国内源,加快我们的下载速度。以下便是两种对应方式的换源
pip换源
Linux:
Linux下的换源,我们首先需要在用户目录下新建文件夹.pip,并且在文件夹内新建文件pip.conf,具体命令如下
cd~
mkdir .pip/
vi pip.conf
随后,我们需要在pip.conf添加下方的内容:
[global]index-url =Simple Index
[install]use-mirrors =truemirrors=http://pypi.douban.com/simple/
trusted-host =pypi.douban.com
Windows:
1、文件管理器文件路径地址栏敲:%APPDATA% 回车,快速进入 C:\Users\电脑用户\AppData\Roaming 文件夹中 2、新建 pip 文件夹并在文件夹中新建 pip.ini 配置文件 3、我们需要在pip.ini 配置文件内容,我们可以选择使用记事本打开,输入以下内容,并按下ctrl+s保存,在这里我们使用的是豆瓣源为例子。
[global]index-url =Simple Index
[install]use-mirrors =truemirrors=http://pypi.douban.com/simple/
trusted-host =pypi.douban.com
conda换源(清华源)官方换源帮助
Windows系统:
TUNA 提供了 Anaconda 仓库与第三方源的镜像,各系统都可以通过修改用户目录下的 .condarc 文件。Windows 用户无法直接创建名为 .condarc 的文件,可先执行conda config --set show_channel_urls yes生成该文件之后再修改。
完成这一步后,我们需要修改C:\Users\User_name\.condarc这个文件,打开后将文件里原始内容删除,将下面的内容复制进去并保存。
channels:
- defaults
show_channel_urls: truedefault_channels:
- Index of /anaconda/pkgs/main/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
- Index of /anaconda/pkgs/r/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
- Index of /anaconda/pkgs/msys2/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
custom_channels:
conda-forge: Index of /anaconda/cloud/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
msys2: Index of /anaconda/cloud/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
bioconda: Index of /anaconda/cloud/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
menpo: Index of /anaconda/cloud/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
pytorch: Index of /anaconda/cloud/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
simpleitk: Index of /anaconda/cloud/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
这一步完成后,我们需要打开Anaconda Prompt 运行 conda clean -i 清除索引缓存,保证用的是镜像站提供的索引。
Linux系统:
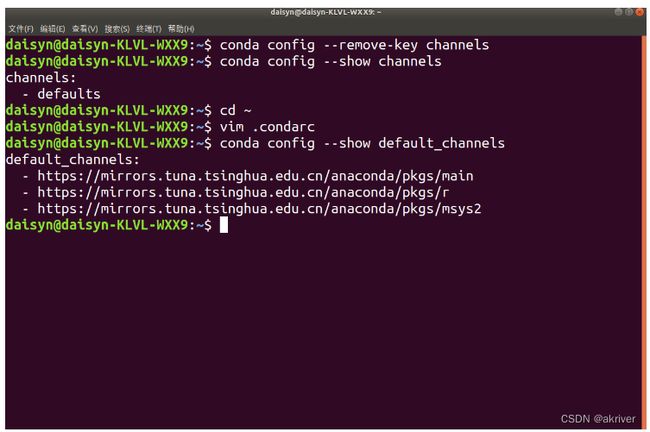
在Linux系统下,我们还是需要修改.condarc来进行换源
cd~
vi .condarc
在vim下,我们需要输入i进入编辑模式,将上方内容粘贴进去,按ESC退出编辑模式,输入:wq保存并退出
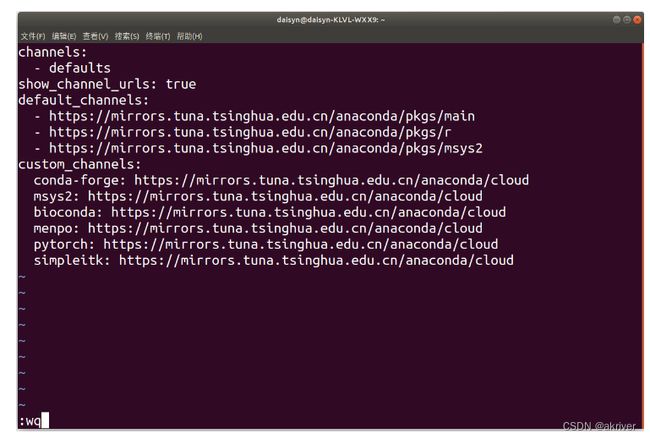
我们可以通过conda config --show default_channels检查下是否换源成功,如果出现下图内容,即代表我们换源成功。
同时,我们仍然需要conda clean -i 清除索引缓存,保证用的是镜像站提供的索引。
1.2.2 查看显卡
该部分如果仅仅只有CPU或者集显的小伙伴们可以跳过该部分
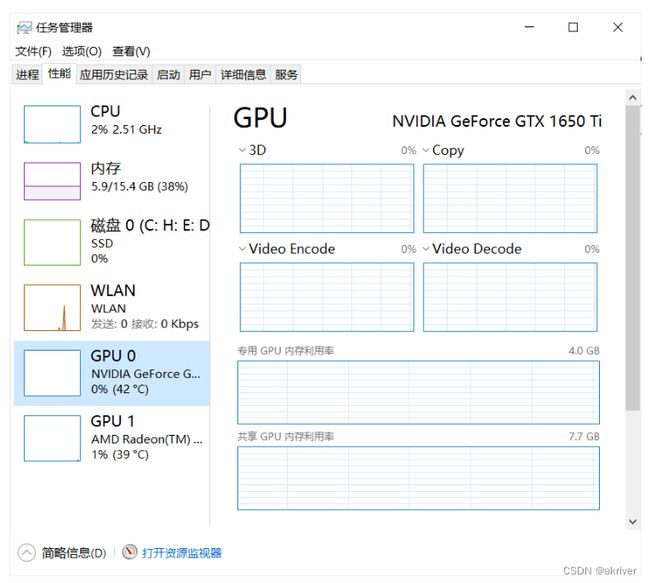
windows:
我们可以通过在cmd/terminal中输入nvidia-smi(Linux和Win命令一样)、使用NVIDIA控制面板和使用任务管理器查看自己是否有NVIDIA的独立显卡及其型号

linux:

我们需要看下版本号,看自己可以兼容的CUDA版本,等会安装PyTorch时是可以向下兼容的。具体适配表如下图所示。

1.2.3 安装PyTorch
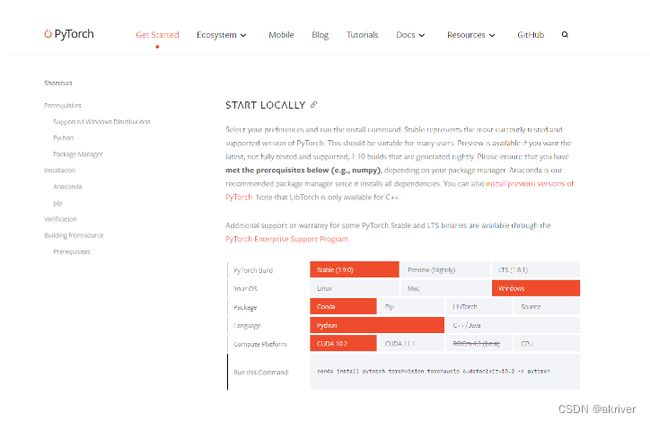
Step 1:登录PyTorch官网
Step 2:Install
这个界面我们可以选择本地开始(Start Locally),云开发(Cloud Partners),以前的Pytorch版本(Previous PyTorch Versions),移动端开发(Mobile),在此处我们需要进行本地安装。
Step 3:选择命令
我们需要结合自己情况选择命令并复制下来,然后使用conda下载或者pip下载(建议conda安装)
打开Terminal,输入conda activate env_name,激活环境并切换到环境下面,我们就可以进行PyTorch的安装了。
注:
- Stable代表的是稳定版本,Preview代表的是先行版本
- 可以结合电脑是否有显卡,选择CPU版本还是CUDA版本,建议还是需要NVIDIA GPU
- 官方建议我们使用Anaconda来进行管理
- 关于安装的系统要求
- Windows:
- Windows 7及更高版本;建议使用Windows 10或者更高的版本
- Windows Server 2008 r2 及更高版本
- Linux:以常见的CentOS和Ubuntu为例
- CentOS, 最低版本7.3-1611
- Ubuntu, 最低版本 13.04,这里会导致cuda安装的最大版本不同
- macOS:
- macOS 10.10及其以上
- Windows:
- 有些电脑所支持的cuda版本<10.2,此时我们需要进行手动降级,即就是cudatoolkit = 你所适合的版本,但是这里需要注意下一定要保持Pytorch和cudatoolkit的版本适配。查看Previous PyTorch Versions | PyTorch
Step 4:在线下载
如果我们使用的Anaconda Prompt进行下载的话,我们需要先通过conda activate env_name,激活我们的虚拟环境中去,再输入命令。
注: 我们需要要把下载指令后面的 -c pytorch 去掉以保证使用清华源下载,否则还是默认从官网下载。
Step 5:离线下载
Windows:
在安装的过程中,我们可能会出现一些奇奇怪怪的问题,导致在线下载不成功,我们也可以使用离线下载的方法进行。
下载地址:https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/pytorch/
通过上面下载地址,我们需要下载好对应版本的pytorch和 torchvision 包,然后打开Anaconda Prompt/Terminal中,进入我们安装的路径下。
cdpackage_location
conda activate env_name
接下来输入以下命令安装两个包
conda install --offline pytorch压缩包的全称(后缀都不能忘记)
conda install --offline torchvision压缩包的全称(后缀都不能忘记)
Step 6:检验是否安装成功
进入所在的虚拟环境,紧接着输入python,在输入下面的代码。
importtorchtorch.cuda.is_available()
False
这条命令意思是检验是否可以调用cuda,如果我们安装的是CPU版本的话会返回False,能够调用GPU的会返回True。一般这个命令不报错的话就证明安装成功。
- Windows系统

- Linux系统

PyTorch的安装绝对是一个容易上火的过程,而且网络上的教程很可能对应早期的版本,或是会出现一些奇奇怪怪的问题,但是别担心,多装几次多遇到点奇奇怪怪的问题就好了,加油!
1.2.4 PyCharm安装(可选操作)
VSCode这些也是ok的,安装PyCharm非必须操作
Linux,Windows此处操作相同,我们建议Windows的同学安装Pycharm即可,因为在Linux上pycharm并不是主流的IDE。
Step 1:进入官网下载
如果是学生的话可以使用学生邮箱注册并下载Professional版本,Community版本也基本能满足我们的日常需求。
Step 2:配置环境
我们需要将虚拟环境设为我们的编译器,具体操作:File --> Settings --> Project:你的项目名称--> Python Interpreter
进去后,我们可以看见他使用的是默认的base环境,现在我们需要将这个环境设置成我们的test环境,点击齿轮,选择Add
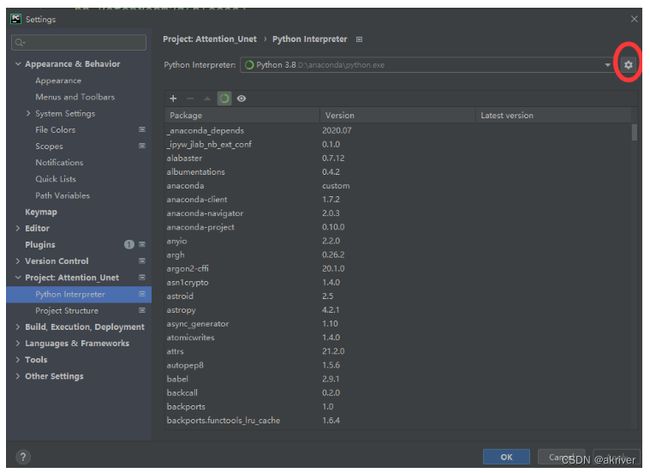
点击Conda Environment ,选择Existing environment,将Interpreter设置为test环境下的python.exe

注:如果在pycharm的环境时,想进入我们的虚拟环境,要使用conda activate 名称
1.3 PyTorch相关资源
PyTorch之所以被越来越多的人使用,不仅在于其完备的教程,还受益于许多相关的资源,在这里,我们列举了相关的优质资源希望能帮助到各位同学。
- Awesome-pytorch-list:目前已获12K Star,包含了NLP,CV,常见库,论文实现以及Pytorch的其他项目。
- PyTorch官方文档:官方发布的文档,十分丰富。
- Pytorch-handbook:GitHub上已经收获14.8K,pytorch手中书。
- PyTorch官方社区:在这里你可以和开发pytorch的人们进行交流。
除此之外,还有很多学习pytorch的资源,b站,stackoverflow,知乎......未来大家还需要多多探索哦。
2.1 张量
本章我们开始介绍PyTorch基础知识,我们从张量说起,建立起对数据的描述,再介绍张量的运算,最后再讲PyTorch中所有神经网络的核心包 autograd ,也就是自动微分,了解完这些内容我们就可以较好地理解PyTorch代码了。
2.1.1 简介
几何代数中定义的张量是基于向量和矩阵的推广,比如我们可以将标量视为零阶张量,矢量可以视为一阶张量,矩阵就是二阶张量。
张量是现代机器学习的基础。它的核心是一个数据容器,多数情况下,它包含数字,有时候它也包含字符串,但这种情况比较少。因此可以把它想象成一个数字的水桶。

- Tensor可以是高维的
- 并非是PyTorch中才有的概念
- PyTorch运算的基本单元
- 基础数据定义和运算
- 在Pytorch中支持GPU运算,自动求导等操作
这里有一些存储在各种类型张量的公用数据集类型:
例子:一个图像可以用三个字段表示:
(width, height, channel) = 3D
但是,在机器学习工作中,我们经常要处理不止一张图片或一篇文档——我们要处理一个集合。我们可能有10,000张郁金香的图片,这意味着,我们将用到4D张量:
(sample_size, width, height, channel) = 4D
在PyTorch中, torch.Tensor 是存储和变换数据的主要工具。如果你之前用过NumPy,你会发现 Tensor 和NumPy的多维数组非常类似。然而,Tensor 提供GPU计算和自动求梯度等更多功能,这些使 Tensor 这一数据类型更加适合深度学习。
2.1.2 创建tensor
在接下来的内容中,我们将介绍几种创建tensor的方法。
我们可以通过torch.rand()的方法,构造一个随机初始化的矩阵:
import torch
x = torch.rand(4, 3)
print(x)
tensor([[0.7569, 0.4281, 0.4722],
[0.9513, 0.5168, 0.1659],
[0.4493, 0.2846, 0.4363],
[0.5043, 0.9637, 0.1469]])
我们可以通过torch.zeros()构造一个矩阵全为 0,并且通过dtype设置数据类型为 long。
import torch
x = torch.zeros(4, 3, dtype=torch.long)
print(x)
tensor([[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0]])
我们可以通过torch.tensor()直接使用数据,构造一个张量:
import torch
x = torch.tensor([5.5, 3])
print(x)
tensor([5.5000, 3.0000])
基于已经存在的 tensor,创建一个 tensor :
x = x.new_ones(4, 3, dtype=torch.double) # 创建一个新的tensor,返回的tensor默认具有相同的 torch.dtype和torch.device
# 也可以像之前的写法 x = torch.ones(4, 3, dtype=torch.double)
print(x)
x = torch.randn_like(x, dtype=torch.float)
# 重置数据类型
print(x)
# 结果会有一样的size
# 获取它的维度信息
print(x.size())
print(x.shape)
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]], dtype=torch.float64)
tensor([[ 2.7311, -0.0720, 0.2497],
[-2.3141, 0.0666, -0.5934],
[ 1.5253, 1.0336, 1.3859],
[ 1.3806, -0.6965, -1.2255]])
torch.Size([4, 3])
torch.Size([4, 3])
返回的torch.Size其实是一个tuple,⽀持所有tuple的操作。
还有一些常见的构造Tensor的函数:
| 函数 |
功能 |
| Tensor(sizes) |
基础构造函数 |
| tensor(data) |
类似于np.array |
| ones(sizes) |
全1 |
| zeros(sizes) |
全0 |
| eye(sizes) |
对角为1,其余为0 |
| arange(s,e,step) |
从s到e,步长为step |
| linspace(s,e,steps) |
从s到e,均匀分成step份 |
| rand/randn(sizes) |
rand是[0,1)均匀分布;randn是服从N(0,1)的正态分布 |
| normal(mean,std) |
正态分布(均值为mean,标准差是std) |
| randperm(m) |
随机排列 |
2.1.3 张量的操作
在接下来的内容中,我们将介绍几种常见的张量的操作方法:
-
加法操作:
import torch
# 方式1
y = torch.rand(4, 3)
print(x + y)
# 方式2
print(torch.add(x, y))
# 方式3 提供一个输出 tensor 作为参数
# 这里的 out 不需要和真实的运算结果保持维数一致,但是会有警告提示!
result = torch.empty(5, 3)
torch.add(x, y, out=result)
print(result)
# 方式4 in-place
y.add_(x)
print(y)
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
-
索引操作:(类似于numpy)
需要注意的是:索引出来的结果与原数据共享内存,修改一个,另一个会跟着修改。如果不想修改,可以考虑使用copy()等方法
# 取第二列
print(x[:, 1])
tensor([-0.0720, 0.0666, 1.0336, -0.6965])
y = x[0,:]
y += 1
print(y)
print(x[0, :]) # 源tensor也被改了了
tensor([3.7311, 0.9280, 1.2497])
tensor([3.7311, 0.9280, 1.2497])
改变大小:如果你想改变一个 tensor 的大小或者形状,你可以使用 torch.view:
x = torch.randn(4, 4)
y = x.view(16)
z = x.view(-1, 8) # -1是指这一维的维数由其他维度决定
print(x.size(), y.size(), z.size())
torch.Size([4, 4]) torch.Size([16]) torch.Size([2, 8])
注意 view() 返回的新tensor与源tensor共享内存(其实是同一个tensor),也即更改其中的一个,另 外一个也会跟着改变。(顾名思义,view仅仅是改变了对这个张量的观察⻆度)
x += 1
print(x)
print(y) # 也加了1
tensor([[ 1.3019, 0.3762, 1.2397, 1.3998],
[ 0.6891, 1.3651, 1.1891, -0.6744],
[ 0.3490, 1.8377, 1.6456, 0.8403],
[-0.8259, 2.5454, 1.2474, 0.7884]])
tensor([ 1.3019, 0.3762, 1.2397, 1.3998, 0.6891, 1.3651, 1.1891, -0.6744,
0.3490, 1.8377, 1.6456, 0.8403, -0.8259, 2.5454, 1.2474, 0.7884])
所以如果我们想返回一个真正新的副本(即不共享内存)该怎么办呢?Pytorch还提供了一 个 reshape() 可以改变形状,但是此函数并不能保证返回的是其拷贝,所以不推荐使用。推荐先用 clone 创造一个副本然后再使用 view 。
注意:使用 clone 还有一个好处是会被记录在计算图中,即梯度回传到副本时也会传到源 Tensor
如果你有一个元素 tensor ,使用 .item() 来获得这个 value:
import torch
x = torch.randn(1)
print(type(x))
print(type(x.item()))
2.1.4 广播机制
当对两个形状不同的 Tensor 按元素运算时,可能会触发广播(broadcasting)机制:先适当复制元素使这两个 Tensor 形状相同后再按元素运算。
x = torch.arange(1, 3).view(1, 2)
print(x)
y = torch.arange(1, 4).view(3, 1)
print(y)
print(x + y)
tensor([[1, 2]])
tensor([[1],
[2],
[3]])
tensor([[2, 3],
[3, 4],
[4, 5]])
由于 x 和 y 分别是1行2列和3行1列的矩阵,如果要计算 x + y ,那么 x 中第一行的2个元素被广播 (复制)到了第二行和第三行,⽽ y 中第⼀列的3个元素被广播(复制)到了第二列。如此,就可以对2 个3行2列的矩阵按元素相加。
2.2 自动求导
PyTorch 中,所有神经网络的核心是 autograd 包。autograd包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义 ( define-by-run )的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的。
torch.Tensor 是这个包的核心类。如果设置它的属性 .requires_grad 为 True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用 .backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性。
注意:在 y.backward() 时,如果 y 是标量,则不需要为 backward() 传入任何参数;否则,需要传入一个与 y 同形的Tensor。
要阻止一个张量被跟踪历史,可以调用.detach()方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。为了防止跟踪历史记录(和使用内存),可以将代码块包装在 with torch.no_grad(): 中。在评估模型时特别有用,因为模型可能具有 requires_grad = True 的可训练的参数,但是我们不需要在此过程中对他们进行梯度计算。
还有一个类对于autograd的实现非常重要:Function。Tensor 和 Function 互相连接生成了一个无环图 (acyclic graph),它编码了完整的计算历史。每个张量都有一个.grad_fn属性,该属性引用了创建 Tensor 自身的Function(除非这个张量是用户手动创建的,即这个张量的grad_fn是 None )。下面给出的例子中,张量由用户手动创建,因此grad_fn返回结果是None。
from __future__ import print_function
import torch
x = torch.randn(3,3,requires_grad=True)
print(x.grad_fn)
None
如果需要计算导数,可以在 Tensor 上调用 .backward()。如果 Tensor 是一个标量(即它包含一个元素的数据),则不需要为 backward() 指定任何参数,但是如果它有更多的元素,则需要指定一个gradient参数,该参数是形状匹配的张量。
创建一个张量并设置requires_grad=True用来追踪其计算历史
x = torch.ones(2, 2, requires_grad=True)
print(x)
tensor([[1., 1.],
[1., 1.]], requires_grad=True)
对这个张量做一次运算:
y = x**2
print(y)
tensor([[1., 1.],
[1., 1.]], grad_fn=
)
y是计算的结果,所以它有grad_fn属性。
print(y.grad_fn)
对 y 进行更多操作
z = y * y * 3
out = z.mean()
print(z, out)
tensor([[3., 3.],
[3., 3.]], grad_fn=
) tensor(3., grad_fn= )
.requires_grad_(...) 原地改变了现有张量的requires_grad标志。如果没有指定的话,默认输入的这个标志是 False。
a = torch.randn(2, 2) # 缺失情况下默认 requires_grad = False
a = ((a * 3) / (a - 1))
print(a.requires_grad)
a.requires_grad_(True)
print(a.requires_grad)
b = (a * a).sum()
print(b.grad_fn)
False
True
梯度
现在开始进行反向传播,因为 out 是一个标量,因此out.backward()和 out.backward(torch.tensor(1.)) 等价。
out.backward()
输出导数 d(out)/dx
print(x.grad)
tensor([[3., 3.],
[3., 3.]])
注意:grad在反向传播过程中是累加的(accumulated),这意味着每一次运行反向传播,梯度都会累加之前的梯度,所以一般在反向传播之前需把梯度清零。
# 再来反向传播⼀次,注意grad是累加的
out2 = x.sum()
out2.backward()
print(x.grad)
out3 = x.sum()
x.grad.data.zero_()
out3.backward()
print(x.grad)
tensor([[4., 4.],
[4., 4.]])
tensor([[1., 1.],
[1., 1.]])
现在我们来看一个雅可比向量积的例子:
x = torch.randn(3, requires_grad=True)
print(x)
y = x * 2
i = 0
while y.data.norm() < 1000:
y = y * 2
i = i + 1
print(y)
print(i)
tensor([-0.9332, 1.9616, 0.1739], requires_grad=True)
tensor([-477.7843, 1004.3264, 89.0424], grad_fn=
) 8
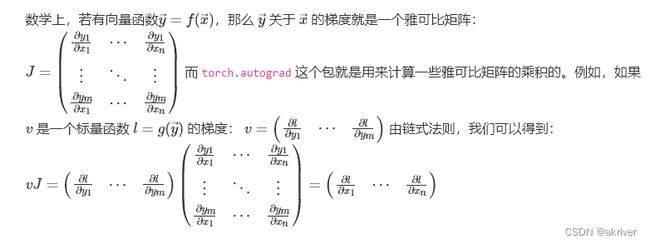
在这种情况下,y 不再是标量。torch.autograd 不能直接计算完整的雅可比矩阵,但是如果我们只想要雅可比向量积,只需将这个向量作为参数传给 backward:
v = torch.tensor([0.1, 1.0, 0.0001], dtype=torch.float)
y.backward(v)
print(x.grad)
tensor([5.1200e+01, 5.1200e+02, 5.1200e-02])
也可以通过将代码块包装在 with torch.no_grad(): 中,来阻止 autograd 跟踪设置了.requires_grad=True的张量的历史记录。
print(x.requires_grad)
print((x ** 2).requires_grad)
with torch.no_grad():
print((x ** 2).requires_grad)
True
True
False
如果我们想要修改 tensor 的数值,但是又不希望被 autograd 记录(即不会影响反向传播), 那么我们可以对 tensor.data 进行操作。
x = torch.ones(1,requires_grad=True)
print(x.data) # 还是一个tensor
print(x.data.requires_grad) # 但是已经是独立于计算图之外
y = 2 * x
x.data *= 100 # 只改变了值,不会记录在计算图,所以不会影响梯度传播
y.backward()
print(x) # 更改data的值也会影响tensor的值
print(x.grad)
tensor([1.])
False
tensor([100.], requires_grad=True)
tensor([2.])
2.3 并行计算简介
在利用PyTorch做深度学习的过程中,可能会遇到数据量较大无法在单块GPU上完成,或者需要提升计算速度的场景,这时就需要用到并行计算。本节让我们来简单地了解一下并行计算的基本概念和主要实现方式,具体的内容会在课程的第二部分详细介绍。
2.3.1 为什么要做并行计算
我们学习PyTorch的目的就是可以编写我们自己的框架,来完成特定的任务。可以说,在深度学习时代,GPU的出现让我们可以训练的更快,更好。所以,如何充分利用GPU的性能来提高我们模型学习的效果,这一技能是我们必须要学习的。这一节,我们主要讲的就是PyTorch的并行计算。PyTorch可以在编写完模型之后,让多个GPU来参与训练。
2.3.2 为什么需要CUDA
CUDA是我们使用GPU的提供商——NVIDIA提供的GPU并行计算框架。对于GPU本身的编程,使用的是CUDA语言来实现的。但是,在我们使用PyTorch编写深度学习代码时,使用的CUDA又是另一个意思。在PyTorch使用 CUDA表示要开始要求我们的模型或者数据开始使用GPU了。
在编写程序中,当我们使用了 .cuda 时,其功能是让我们的模型或者数据迁移到GPU当中,通过GPU开始计算。
注:
- 我们使用GPU时使用的是.cuda而不是使用.gpu。这是因为当前GPU的编程接口采用CUDA,但是市面上的GPU并不是都支持CUDA,只有部分NVIDIA的GPU才支持,AMD的GPU编程接口采用的是OpenGL,在现阶段PyTorch并不支持。
- 数据在GPU和CPU之间进行传递时会比较耗时,应当尽量避免。
- GPU运算很快,但是在使用简单的操作时,我们应该尽量使用CPU去完成。
- 当我们的服务器上有多个GPU,我们应该指明我们使用的GPU是哪一块,如果我们不设置的话,tensor.cuda()方法会默认将tensor保存到第一块GPU上,等价于tensor.cuda(0),这将会导致爆出out of memory的错误。我们可以通过以下两种方式继续设置。
#设置在文件最开始部分
import os
os.environ["CUDA_VISIBLE_DEVICE"] = "2" # 设置默认的显卡
CUDA_VISBLE_DEVICE=0,1 python train.py # 使用0,1两块GPU
2.3.3 常见的并行的方法:
网络结构分布到不同的设备中(Network partitioning)
在刚开始做模型并行的时候,这个方案使用的比较多。其中主要的思路是,将一个模型的各个部分拆分,然后将不同的部分放入到GPU来做不同任务的计算。其架构如下:
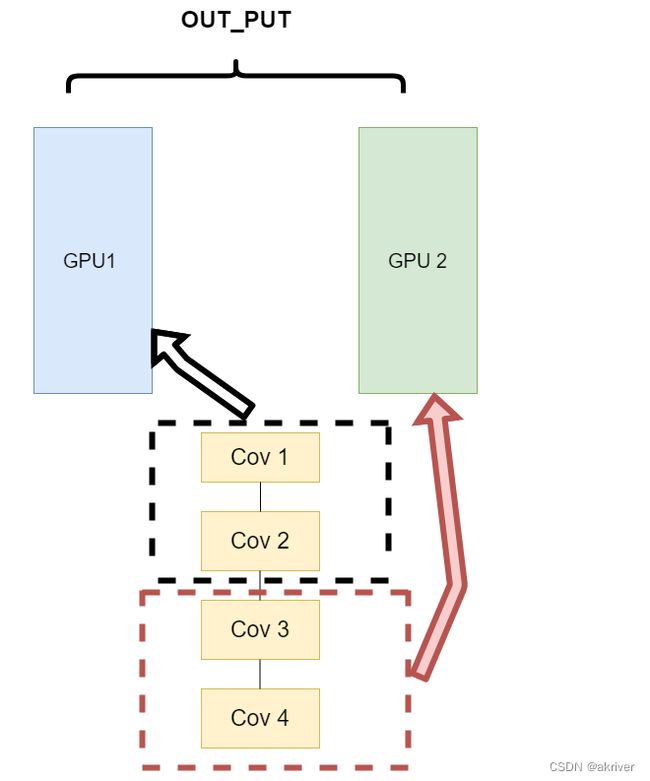
这里遇到的问题就是,不同模型组件在不同的GPU上时,GPU之间的传输就很重要,对于GPU之间的通信是一个考验。但是GPU的通信在这种密集任务中很难办到,所以这个方式慢慢淡出了视野。
同一层的任务分布到不同数据中(Layer-wise partitioning)
第二种方式就是,同一层的模型做一个拆分,让不同的GPU去训练同一层模型的部分任务。其架构如下:
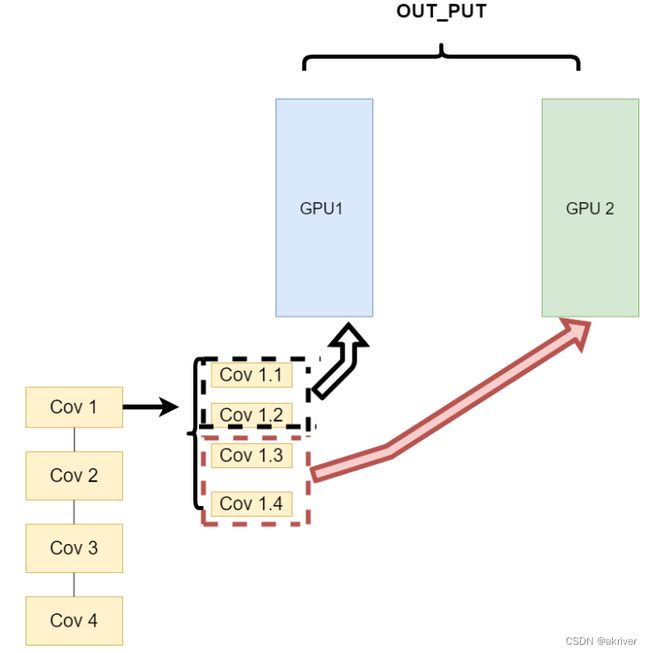
这样可以保证在不同组件之间传输的问题,但是在我们需要大量的训练,同步任务加重的情况下,会出现和第一种方式一样的问题。
不同的数据分布到不同的设备中,执行相同的任务(Data parallelism)
第三种方式有点不一样,它的逻辑是,我不再拆分模型,我训练的时候模型都是一整个模型。但是我将输入的数据拆分。所谓的拆分数据就是,同一个模型在不同GPU中训练一部分数据,然后再分别计算一部分数据之后,只需要将输出的数据做一个汇总,然后再反传。其架构如下:

这种方式可以解决之前模式遇到的通讯问题。
PS:现在的主流方式是数据并行的方式(Data parallelism)
仅作笔记使用,支持开源学习,支持Datawhale:
第一章:PyTorch的简介和安装 — 深入浅出PyTorch https://datawhalechina.github.io/thorough-pytorch/%E7%AC%AC%E4%B8%80%E7%AB%A0/index.html第二章:PyTorch基础知识 — 深入浅出PyTorchhttps://datawhalechina.github.io/thorough-pytorch/%E7%AC%AC%E4%BA%8C%E7%AB%A0/index.html
https://datawhalechina.github.io/thorough-pytorch/%E7%AC%AC%E4%B8%80%E7%AB%A0/index.html第二章:PyTorch基础知识 — 深入浅出PyTorchhttps://datawhalechina.github.io/thorough-pytorch/%E7%AC%AC%E4%BA%8C%E7%AB%A0/index.html