利用Python开发智能阅卷系统, 太有趣了!
随着现代图像处理和人工智能技术的快速发展,不少学者尝试讲CV应用到教学领域,能够代替老师去阅卷,将老师从繁杂劳累的阅卷中解放出来,从而进一步有效的推动教学质量上一个台阶。
传统的人工阅卷,工作繁琐,效率低下,进度难以控制且容易出现试卷遗漏未改、登分失误等现象。
现代的“机器阅卷”,工作便捷、效率高、易操作,只需要一个相机(手机),拍照即可获取成绩,可以导入Excel表格便于存档管理。
下面我们从代码实现的角度来解释一下我们这个简易答题卡识别系统的工作原理。第一步,导入工具包及一系列的预处理
import numpy as np
import argparse
import imutils
import cv2
设置参数
ap = argparse.ArgumentParser()
ap.add_argument("-i", “–image”, default=“test_01.png”)
args = vars(ap.parse_args())
正确答案
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1} #
def order_points(pts):
一共4个坐标点
rect = np.zeros((4, 2), dtype = “float32”)
按顺序找到对应坐标0,1,2,3分别是 左上,右上,右下,左下
计算左上,右下
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
计算右上和左下
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
def four_point_transform(image, pts):
获取输入坐标点
rect = order_points(pts)
(tl, tr, br, bl) = rect
计算输入的w和h值
widthA = np.sqrt(((br[0]-bl[0])** 2) + ((br[1]-bl[1])**2))
widthB = np.sqrt(((tr[0] -tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0]-br[0])**2)+((tr[1]-br[1])**2))
heightB = np.sqrt(((tl[0]-bl[0])**2)+((tl[1]-bl[1])**2))
maxHeight = max(int(heightA), int(heightB))
变换后对应坐标位置
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = “float32”)
计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
return warped # 返回变换后结果
def sort_contours(cnts, method=“left-to-right”):
reverse = False
i = 0
if method == “right-to-left” or method == “bottom-to-top”:
reverse = True
if method == “top-to-bottom” or method == “bottom-to-top”:
i = 1
boundingBoxes = [cv2.boundingRect© for c in cnts]
(cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),
key=lambda b: b[1][i], reverse=reverse))
return cnts, boundingBoxes
def cv_show(name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
image = cv2.imread(args[“image”])
contours_img = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
edged = cv2.Canny(blurred, 75, 200)
轮廓检测
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(contours_img,cnts,-1,(0,0,255),3)
docCnt = None
确保检测到了
if len(cnts) > 0:
根据轮廓大小进行排序
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
for c in cnts: # 遍历每一个轮廓
近似
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
准备做透视变换
if len(approx) == 4:
docCnt = approx
break
执行透视变换
warped = four_point_transform(gray, docCnt.reshape(4, 2))
thresh = cv2.threshold(warped, 0, 255,
cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
thresh_Contours = thresh.copy()
找到每一个圆圈轮廓
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(thresh_Contours,cnts,-1,(0,0,255),3)
questionCnts = []
for c in cnts:# 遍历
计算比例和大小
(x, y, w, h) = cv2.boundingRect©
ar = w / float(h)
根据实际情况指定标准
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
questionCnts.append©
按照从上到下进行排序
questionCnts = sort_contours(questionCnts,
method=“top-to-bottom”)[0]
correct = 0
每排有5个选项
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
cnts = sort_contours(questionCnts[i:i + 5])[0]
bubbled = None
for (j, c) in enumerate(cnts): # 遍历每一个结果
使用mask来判断结果
mask = np.zeros(thresh.shape, dtype=“uint8”)
cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充
通过计算非零点数量来算是否选择这个答案
mask = cv2.bitwise_and(thresh, thresh, mask=mask)
total = cv2.countNonZero(mask)
通过阈值判断
if bubbled is None or total > bubbled[0]:
bubbled = (total, j)
第二步,与正确答案进行对比
color = (0, 0, 255)
k = ANSWER_KEY[q]
判断正确
if k == bubbled[1]:
color = (0, 255, 0)
correct += 1
cv2.drawContours(warped, [cnts[k]], -1, color, 3) #绘图
#正确率的文本显示
score = (correct / 5.0) * 100
print("[INFO] score: {:.2f}%".format(score))
cv2.putText(warped, “{:.2f}%”.format(score), (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow(“Input”, image)
cv2.imshow(“Output”, warped)
cv2.waitKey(0)
对Python感兴趣或者是正在学习的小伙伴,可以加入我们的Python学习扣qun:855408893 ,从0基础的python脚本到web开发、爬虫、django、数据挖掘数据分析等,0基础到项目实战的资料都有整理。送给每一位python的小伙伴!每晚分享一些学习的方法和需要注意的小细节,学习路线规划,利用编程赚外快。点击加入我们的 python学习圈
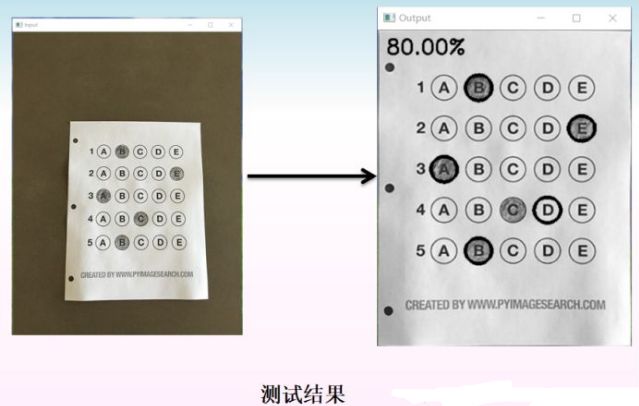
最终实现的效果如下: