(pytorch进阶之路)NormalizingFlow标准流
文章目录
- 导读
-
- 概述
- flow结构详解
-
- Multi-Scale结构
- Actnorm
- 可逆的1×1卷积
- 仿射耦合层
- 论文地址
- 代码地址
- 实现
-
- actnorm
- 可逆1×1卷积层
- 仿射耦合层
- FlowStep
- Block
- Glow
导读
概述
NF和GAN一样是一个生成模型,NF与GAN不同的是,GAN是以模糊的方式对目标数据分布进行建模, 没有直接写出px的表达式,而是将x送入下游的判别器做分类任务,通过对抗的方式让生成器生成比较好的效果
而标准流NF可以显式地将目标的表达式px写出来,通过优化对数似然函数达到最大去调整参数,使得模型很好的拟合目标分布
标准流模型是一个可逆的模型,也就是训练的时候,是从x到z的变化过程,最大化似然函数,推理时候就反过来使用,以一个随机变量z作为输入,把网络完全逆过来,计算反函数,算出x
设计巧妙的变换,使得似然函数容易计算,并且逆变换也很容易计算。
在给定数据分布的情况下,似然函数是什么,给定可定的数据,我们认为这个模型输出结果反应数据存在可能性有多大
NF训练和推理阶段是可并行的,而像自回归推理在解码阶段就不能并行而是递归的
NF使用的是可能的1×1的卷积,1×1的卷积抛弃了传统卷积的局部建模思路,而看作是一个作用在通道层的MLP网络,1×1的卷积做的是通道融合机制,在transformer中也有这一类似的思路,mhsa和FFN,mhsa做的事emb与周围的emb时间关联性,FFN做的事就是通道融合
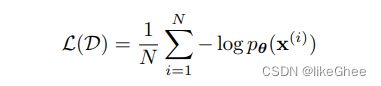
给定一个数据集D,可以写出它的对数似然函数
大部分基于flow的生成式模型,定义有:
从pθ分布中采样随机变量z
z送入gθ变换函数中得到x,x就是训练集,也是最终要预测的目标数据
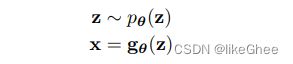
pθ有一个可解的概率密度函数(PDF),比如高斯分布
gθ是可逆的(也可以说是双射的),那么就能从gθ的反函数得到z
什么是标准流呢,z = fθ(x) = gθ-1(x)
fθ是由一系列变换函数嵌套构成,f=f1·f2·…fk
那么x和z之间的关系就可以写成下面形式:

上述过程就成为Normalizing Flow:将可见数据分布x变为标准分布z
可见数据x的似然函数(概率密度函数)为:

x的pdf可以写成z的pdf 乘以 z关于x的雅可比矩阵的行列式的绝对值:pdf(x) = pdf(z) × |det(dz/dx)|
两边取log就是上图公式,理解就是从hi-1到hi变化,每变换一步就增加对数的概率密度改变量一点
进一步理解x -> z -> x,从x到z,z到x,经过两次变换还原,两步分别得到log-det1和log-det2,jacob1和jacob2,x到z增加的对数概率密度是log-det1,z到x增加的对数概率密度是log-det2,那么log-det1+log - det2应该抵消了等于0,那么log-det1和log-det2就是相反数的关系
关于dz/dx推导部分,根据求导的链式法则,x <-> h1 <-> h2 … <->z,其中记h0=x, hk=z
=> 则dz/dx可以写成 Π[i=从1到k] dhi/dhi-1,取对数就是上图公式所示
pdf(z)是标准分布的概率密度函数,加法后面的一项可以写出来,那么pdf(x)就能写出来 ,两边取对数,对log批次取一个负号,就能用梯度下降算法优化参数,最小化负对数似然即可
置换矩阵行列式det为0,三角矩阵det为斜对角线的乘积,这类矩阵的det比较好计算
我们保证jacobian矩阵dhi/dhi-1矩阵是一个三角矩阵的话就十分好计算了,取个log就是对角线元素相加了:

flow结构详解
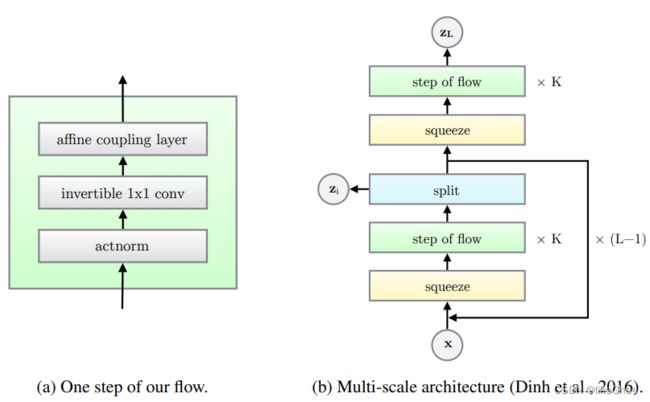
生成式flow由一系列单步的flow构成,这个单步flow,是可逆的,输入可以输出,输出可以输入,每步的log-det也能写出来
每个flow包含三个串行部分:
第一部分:激活的归一操作
第二部分:可逆的1×1卷积
第三部分:耦合层
深度是k,由k个flow串联
下表是三个主要部分,函数和逆函数以及log-det
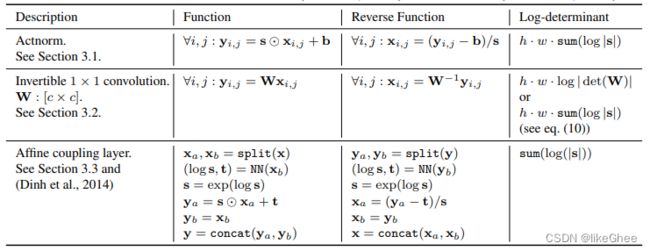
x表示每层输入,y表示每层的输出,x和y都是[h×w×c]的三维张量,i和j表示h和w的索引,NN表示非线性变换,决定了整个网络的表达能力
Multi-Scale结构
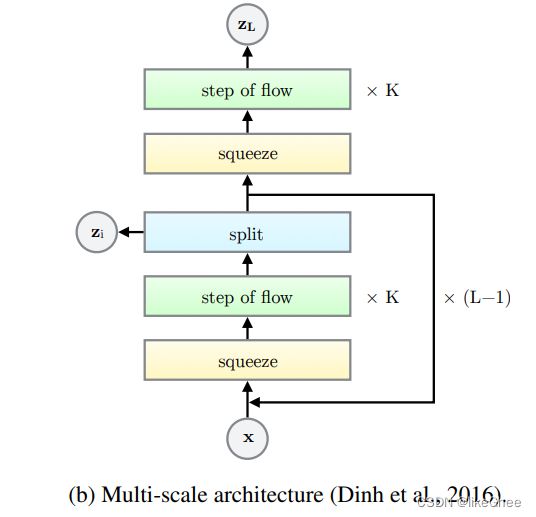
multi-scale结构(Multi-Scale结构实现了模型对不同尺度物体和特征的关注)
论文:https://arxiv.org/pdf/2007.09384.pdf
每个block会划分一个zi,每个block先预测出一半的z,另一半作为下一个block的输入,下个block再分出一半的z,逐渐的去预测z,而不是一次性预测z,这样通道数越来越少,减少计算量
multi-scale结构中间层就是step of flow 单步flow,下面是flow结构每部分详解
Actnorm
第一部分是Actnorm,激活归一化层,per channel ( c )的仿射变换,对每个通道进行操作
对于任意的i和j,
前向运算:yij=s element_× xij + b,yij、xij和b都是长度为channel大小的向量,s是缩放权重,b是偏置量
逆函数:x=(y-b)/s
关于log-det(dy/dx):
x到y的雅可比矩阵,因为是element-wise乘法,所以雅可比矩阵就是对角矩阵
举例
现有公式①
①:[x1, x2, x3] ele-× [w1, w2, w3] = [y1, y2, y3]
记 s = [w1, w2, w3]
那么①的雅可比矩阵:
[[dy1/dx1 = w1 , dy1/dx2 = 0, dy1/dx3 = 0]
[dy2/dx1 = 0, dy2/dx2 = w2, dy2/dx3 = 0]
[dy3/dx1 = 0, dy3/dx2 = 0, dy3/dx3 = w3]]
那么一个点的log-det = sum(log |s|),所有点log-det在×一个h和w log-det = h · w · sum(log|s|)
s和b的初始化目的是使得进入后面的网络的输入在每个通道上是mean=0,std=1,因此s和b初始化依赖于第一批数据的,计算每个通道数的均值和方差,s=1/方差,b=-mean,可以看作是数据依赖的初始化
这样的做法有些奇怪,其实我们预处理的时候就将数据归一化再输入了
可逆的1×1卷积
kernel_size = W = [c×c×1×]
前向运算:yij = W @ xij, [c, c] @ [c, 1] => [c, 1]
逆运算:xij = W-1 @ yij,[c, c] @ [c, 1] => [c, 1]
对数似然增量log-det(dy/dx):
yij = W@xij ,其实这个式子的雅可比矩阵就是W,那计算W的det行列式,直接硬求log(det(W)),复杂度是n3次方,
log-det = h · w · log(|det(W)|)
直接计算det(W)复杂度计算复杂,另一种方法是LU分解,
W = PL(U + diag(s)),
P是一个排列矩阵(单位矩阵经过行列交换而得到的新矩阵,每行或每列上有且仅有一个1,其他元素都为0),
L是下三角矩阵但是对角线元素是1,
U是上三角矩阵但是对角线元素是0,
diag(s)是以s为对角线的矩阵,
矩阵相乘的行列式也相乘,那么log-det(W) = sum|log(s)|
类似权重归一化,后续只更新PLU矩阵
仿射耦合层
前向运算:
第一步,x拆分成xa和xb,这个拆分是在通道维度上做的[c, ] -> [ca, ] 和 [cb,],ca和cb满足ca+cb=c
第二步,将xb送入神经网络NN得到s和t
第三步,xa,s和t经过仿射变换得到ya,ya= xa×s + t
第四步,yb直接等于xb
逆运算:
yb直接就等于xb,这步很简单
关键是ya如何变为xa,得到xb后计算的得出s和t,(ya - t) / s = xa
对数似然增量log-det:
计算雅可比矩阵
ya= xa×s + t =>
dya/dxa = diag(s)
dya/dxb是一个比较复杂的矩阵
yb = xb =>
dyb/dxa = 0
dyb/dxb = 全1矩阵
合起来整体雅可比矩阵为
[[diag(s), 复杂矩阵],
[全0矩阵, 全1矩阵]]
整体雅可比矩阵就是一个上三角矩阵,因此det行列式就是det(diag(s)) = sum(s),与NN是什么形式无关
=> 概率密度增量为sum(log|s|)
论文地址
https://proceedings.neurips.cc/paper/2018/file/d139db6a236200b21cc7f752979132d0-Paper.pdf
代码地址
https://github.com/rosinality/glow-pytorch
实现
model.py和train.py,实现很简洁
model有三层act norm,1×1convolution,affine coupling layer,将每个模块都写成了class,最终汇总成一个flow step,很多个flow step则构成了一个glow。则一共有五个模块
actnorm
归一化层,其实这一层就是对batch做归一化,减去mean再除以std
class ActNorm(nn.Module):
def __init__(self, in_channel, logdet=True):
# logdet 函数的对数值,计算对数行列式的值
# s ele_× x + b,s和b的in_channel有关
super().__init__()
# 平移量,nn.Parameter 可训练参数,写成input的形状
self.loc = nn.Parameter(torch.zeros(1, in_channel, 1, 1))
# 伸缩量
self.scale = nn.Parameter(torch.ones(1, in_channel, 1, 1))
self.register_buffer("initialized", torch.tensor(0, dtype=torch.uint8))
# buffer量 相当于下面的实例化,作用是一个标志位
# self.initialized = nn.Parameter(torch.tensor(0, dtype=torch.uint8), requires_grad=False)
# s和b是和batch有关的统计量,在第一次运行的时候需要去计算,初始化之后置为1
self.logdet = logdet
def initialize(self, input):
with torch.no_grad():
flatten = input.permute(1, 0, 2, 3).contiguous().view(input.shape[1], -1)
mean = (
flatten.mean(1)
.unsqueeze(1)
.unsqueeze(2)
.unsqueeze(3)
.permute(1, 0, 2, 3)
)
# mean = torch.mean(input, dim=[0,2,3], keepdim=True)
# std = torch.std(input, dim=[0,2,3], keepdim=True)
std = (
flatten.std(1)
.unsqueeze(1)
.unsqueeze(2)
.unsqueeze(3)
.permute(1, 0, 2, 3)
)
self.loc.data.copy_(-mean)
self.scale.data.copy_(1 / (std + 1e-6))
def forward(self, input):
bs, _, height, width = input.shape
# 如果没有做initialize,则初始化
if self.initialized.item() == 0:
self.initialize(input)
# 标注成1,表示已经初始化了
self.initialized.fill_(1)
log_abs = logabs(self.scale)
# log-det计算,对数似然的增量
logdet = height * width * torch.sum(log_abs)
if self.logdet:
return self.scale * (input + self.loc), logdet
else:
return self.scale * (input + self.loc)
def reverse(self, output):
# 推理的时候走reverse
return output / self.scale - self.loc
可逆1×1卷积层
本质上1×1就是一个MLP,比较简单
细节是用了PLU分解
LU分解前提是矩阵不为0,正交矩阵行列式不为0,对任意矩阵做qr分解得到正交矩阵
只对通道进行融合
逆过程推理过了,reverse函数实现
class InvConv2dLU(nn.Module):
# LU快速分解
def __init__(self, in_channel):
super().__init__()
weight = np.random.randn(in_channel, in_channel)
# qr正交分解
q, _ = la.qr(weight)
# lu分解,plu
w_p, w_l, w_u = la.lu(q.astype(np.float32))
# 取对角线元素作为向量
w_s = np.diag(w_u)
# 对w_u取上三角部分,从第一条对角线开始取,对于一个方阵而言中间的是第0条
w_u = np.triu(w_u, 1)
# mask,左下角和中间一条对角线元素都为0,右上角为1
u_mask = np.triu(np.ones_like(w_u), 1)
# 转置,下三角元素除对角线全1
l_mask = u_mask.T
w_p = torch.from_numpy(w_p)
w_l = torch.from_numpy(w_l)
w_s = torch.from_numpy(w_s)
w_u = torch.from_numpy(w_u)
# w_p是固定的,不需要更新
self.register_buffer("w_p", w_p)
# 使用register_buffer设置成无需更新的量
self.register_buffer("u_mask", torch.from_numpy(u_mask))
self.register_buffer("l_mask", torch.from_numpy(l_mask))
# 对角线向量符号
self.register_buffer("s_sign", torch.sign(w_s))
# 对角线全为1的对角矩阵
self.register_buffer("l_eye", torch.eye(l_mask.shape[0]))
# 三个要更新的量
self.w_l = nn.Parameter(w_l)
self.w_s = nn.Parameter(logabs(w_s))
self.w_u = nn.Parameter(w_u)
def forward(self, input):
_, _, height, width = input.shape
# 重新拼凑回weight
weight = self.calc_weight()
out = F.conv2d(input, weight)
logdet = height * width * torch.sum(self.w_s)
return out, logdet
def calc_weight(self):
weight = (
self.w_p
# 因为w_l是在训练而变化的,l_mask下三角元素除对角线全1
@ (self.w_l * self.l_mask + self.l_eye)
@ ((self.w_u * self.u_mask) + torch.diag(self.s_sign * torch.exp(self.w_s)))
)
return weight.unsqueeze(2).unsqueeze(3)
def reverse(self, output):
weight = self.calc_weight()
return F.conv2d(output, weight.squeeze().inverse().unsqueeze(2).unsqueeze(3))
仿射耦合层
分割x,传入NN(神经网络),NN不影响求解复杂度,只影响表示分布的质量,filter_size确定NN中的卷积的卷积核数目大小,
代码中NN最后一层使用ZeroConv2d,全0卷积(weight和bias全0),目的是为实现残差的效果,恒等变换的效果。
如果使用affine输出两部分log s和t,不做affine输出一半的channel就好
forward的时候使用chunk分割数据x
affine走的仿射的话,将x送入NN,将NN输出结果再分为两部分,logs和t
将logs取sigmoid得到s
用分割的x_b缩放平移得到out_b
x_a和out_b拼接输出为结果
不走affine,则xa和xb之间没有coupling(耦合),只是简单的加法
class ZeroConv2d(nn.Module):
def __init__(self, in_channel, out_channel, padding=1):
super().__init__()
self.conv = nn.Conv2d(in_channel, out_channel, 3, padding=0)
self.conv.weight.data.zero_()
self.conv.bias.data.zero_()
self.scale = nn.Parameter(torch.zeros(1, out_channel, 1, 1))
def forward(self, input):
out = F.pad(input, [1, 1, 1, 1], value=1)
out = self.conv(out)
out = out * torch.exp(self.scale * 3)
return out
class AffineCoupling(nn.Module):
def __init__(self, in_channel, filter_size=512, affine=True):
super().__init__()
self.affine = affine
self.net = nn.Sequential(
nn.Conv2d(in_channel // 2, filter_size, 3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(filter_size, filter_size, 1),
nn.ReLU(inplace=True),
ZeroConv2d(filter_size, in_channel if self.affine else in_channel // 2),
)
self.net[0].weight.data.normal_(0, 0.05)
self.net[0].bias.data.zero_()
self.net[2].weight.data.normal_(0, 0.05)
self.net[2].bias.data.zero_()
def forward(self, input):
in_a, in_b = input.chunk(2, 1)
if self.affine:
log_s, t = self.net(in_a).chunk(2, 1)
# s = torch.exp(log_s)
s = F.sigmoid(log_s + 2)
# out_a = s * in_a + t
out_b = (in_b + t) * s
logdet = torch.sum(torch.log(s).view(input.shape[0], -1), 1)
else:
net_out = self.net(in_a)
out_b = in_b + net_out
logdet = None
return torch.cat([in_a, out_b], 1), logdet
def reverse(self, output):
out_a, out_b = output.chunk(2, 1)
if self.affine:
log_s, t = self.net(out_a).chunk(2, 1)
# s = torch.exp(log_s)
s = F.sigmoid(log_s + 2)
# in_a = (out_a - t) / s
in_b = out_b / s - t
else:
net_out = self.net(out_a)
in_b = out_b - net_out
return torch.cat([out_a, in_b], 1)
FlowStep
三个部分拼接成一个flow
实例化三个层,actnorn,1×1conv,affinecoupling
forward中依次经过三层
reverse则依次反过来调用三个层的reverse函数即可
class Flow(nn.Module):
def __init__(self, in_channel, affine=True, conv_lu=True):
super().__init__()
self.actnorm = ActNorm(in_channel)
if conv_lu:
self.invconv = InvConv2dLU(in_channel)
else:
self.invconv = InvConv2d(in_channel)
self.coupling = AffineCoupling(in_channel, affine=affine)
def forward(self, input):
out, logdet = self.actnorm(input)
out, det1 = self.invconv(out)
out, det2 = self.coupling(out)
logdet = logdet + det1
if det2 is not None:
logdet = logdet + det2
return out, logdet
def reverse(self, output):
input = self.coupling.reverse(output)
input = self.invconv.reverse(input)
input = self.actnorm.reverse(input)
return input
Block
K个flow为一组,一组flow前加squeeze,后加split构成一个block,block重复L-1次
实现L-1次block结构
对in_channel×4得到squeeze dim,将通道数扩成4倍,
循环n_flow次,组合成k个flow
split源自NVP论文,multi-scale结构,每一层直接输出一半的z,和一半的output作为下一层的输入,随着层数的增加,计算的复杂度是越来越小。
如果有split,则输入in_channel×2,输出in_channel×4
如果没有split,输入in_channel×4,输出in_channel×8
如果是生成图片任务,可以加入condition,使用embedding表达,再将embedding映射到in_channel×4上(和h_zero形状一致)
在forward中
对input的通道和空间进行一定的缩放,通道扩大成4倍,空间的长和宽缩小自原来的一半,squeeze操作,空间部分挤压到通道上
遍历每个flow,nn.ModuleList,只有继承自Module里的参数才能成为整个模型的参数,用List的时候梯度更新会被忽略
要split,最后一个的flow的输出分割成两部分,一个是out,另一半是z作为输出
为了计算所有z的联合概率,求log pz,使用可学习的先验分布prior(不是标准分布),out作为输入得到mean和log_sd,则mean和log_sd是可学习的,我们定义了一个可学习的张量h_zero初始值为0,h_zero+condition送入到prior卷积层,分割为mean和log_sd
split:z_new,mean,log_sd送入高斯log p 得到log p,得到z的对数似然
不走split的话,直接将out送入到高斯log p
高斯log p:高斯密度函数再取一个log
reverse就反过来,
split的话就从z和x推出新的x,
z和x拼接送入prior,得到mean和log_sd,根据mean和log_sd从eps正态分布中采样,再乘以log_sd加上mean进行参数重整化,得到z,z和output拼接起来得到inout
没有split,直接将z作为input
对flow进行reverse
再对通道数缩小,长和宽扩大
class Block(nn.Module):
def __init__(self, in_channel, n_flow, split=True, affine=True, conv_lu=True):
super().__init__()
squeeze_dim = in_channel * 4
self.flows = nn.ModuleList()
for i in range(n_flow):
self.flows.append(Flow(squeeze_dim, affine=affine, conv_lu=conv_lu))
self.split = split
if split:
self.prior = ZeroConv2d(in_channel * 2, in_channel * 4)
else:
self.prior = ZeroConv2d(in_channel * 4, in_channel * 8)
def forward(self, input):
b_size, n_channel, height, width = input.shape
squeezed = input.view(b_size, n_channel, height // 2, 2, width // 2, 2)
squeezed = squeezed.permute(0, 1, 3, 5, 2, 4)
out = squeezed.contiguous().view(b_size, n_channel * 4, height // 2, width // 2)
logdet = 0
for flow in self.flows:
out, det = flow(out)
logdet = logdet + det
if self.split:
out, z_new = out.chunk(2, 1)
mean, log_sd = self.prior(out).chunk(2, 1)
log_p = gaussian_log_p(z_new, mean, log_sd)
log_p = log_p.view(b_size, -1).sum(1)
else:
zero = torch.zeros_like(out)
mean, log_sd = self.prior(zero).chunk(2, 1)
log_p = gaussian_log_p(out, mean, log_sd)
log_p = log_p.view(b_size, -1).sum(1)
z_new = out
return out, logdet, log_p, z_new
def reverse(self, output, eps=None, reconstruct=False):
input = output
if reconstruct:
if self.split:
input = torch.cat([output, eps], 1)
else:
input = eps
else:
if self.split:
mean, log_sd = self.prior(input).chunk(2, 1)
z = gaussian_sample(eps, mean, log_sd)
input = torch.cat([output, z], 1)
else:
zero = torch.zeros_like(input)
# zero = F.pad(zero, [1, 1, 1, 1], value=1)
mean, log_sd = self.prior(zero).chunk(2, 1)
z = gaussian_sample(eps, mean, log_sd)
input = z
for flow in self.flows[::-1]:
input = flow.reverse(input)
b_size, n_channel, height, width = input.shape
unsqueezed = input.view(b_size, n_channel // 4, 2, 2, height, width)
unsqueezed = unsqueezed.permute(0, 1, 4, 2, 5, 3)
unsqueezed = unsqueezed.contiguous().view(
b_size, n_channel // 4, height * 2, width * 2
)
return unsqueezed
Glow
nn.ModuleList中定义了很多block
最后一层split设置成False
classifier_net通过MLP判别到正确的分类上
依次遍历block,送入block中得到out,det,log_p,z_new,统计zout,logdet,logpsum
送入classifier_net进行判别
reverse则依次调用
class Glow(nn.Module):
def __init__(
self, in_channel, n_flow, n_block, affine=True, conv_lu=True
):
super().__init__()
self.blocks = nn.ModuleList()
n_channel = in_channel
for i in range(n_block - 1):
self.blocks.append(Block(n_channel, n_flow, affine=affine, conv_lu=conv_lu))
n_channel *= 2
self.blocks.append(Block(n_channel, n_flow, split=False, affine=affine))
def forward(self, input):
log_p_sum = 0
logdet = 0
out = input
z_outs = []
for block in self.blocks:
out, det, log_p, z_new = block(out)
z_outs.append(z_new)
logdet = logdet + det
if log_p is not None:
log_p_sum = log_p_sum + log_p
return log_p_sum, logdet, z_outs
def reverse(self, z_list, reconstruct=False):
for i, block in enumerate(self.blocks[::-1]):
if i == 0:
input = block.reverse(z_list[-1], z_list[-1], reconstruct=reconstruct)
else:
input = block.reverse(input, z_list[-(i + 1)], reconstruct=reconstruct)
return input