深度学习与计算机视觉教程(10) | 轻量化CNN架构 (SqueezeNet,ShuffleNet,MobileNet等)(CV通关指南·完结)

- 作者:韩信子@ShowMeAI
- 教程地址:https://www.showmeai.tech/tutorials/37
- 本文地址:https://www.showmeai.tech/article-detail/269
- 声明:版权所有,转载请联系平台与作者并注明出处
- 收藏ShowMeAI查看更多精彩内容
前言
卷积神经网络的结构优化和深度加深,带来非常显著的图像识别效果提升,但同时也带来了高计算复杂度和更长的计算时间,实际工程应用中对效率的考虑也很多,研究界与工业界近年都在努力「保持效果的情况下压缩网络复杂度」,也诞生了很多轻量化网络。在本篇内容中,ShowMeAI对常见主流轻量级网络进行展开讲解。
本篇重点
- 神经网络参数与复杂度计算
- 轻量化网络
- SqueezeNet
- Xception
- ShuffleNet V1~V2
- MobileNet V1~V3
1.基础知识
我们先来做一点基础知识储备,本篇讲到的轻量化CNN框架,我们需要了解参数量和计算量的估测与计算方式。
1.1 复杂度分析
- 理论计算量(FLOPs):浮点运算次数(FLoating-point Operation)
- 参数数量(params):单位通常为 M M M,用 float32 表示。
1.2 典型结构对比
- 标准卷积层 std conv(主要贡献计算量)
- params: k h × k w × c i n × c o u t k_h\times k_w\times c_{in}\times c_{out} kh×kw×cin×cout
- FLOPs: k h × k w × c i n × c o u t × H × W k_h\times k_w\times c_{in}\times c_{out}\times H\times W kh×kw×cin×cout×H×W
- 全连接层 fc(主要贡献参数量)
- params: c i n × c o u t c_{in}\times c_{out} cin×cout
- FLOPs: c i n × c o u t c_{in}\times c_{out} cin×cout
- group conv
- params: ( k h × k w × c i n / g × c o u t / g ) × g = k h × k w × c i n × c o u t / g (k_h\times k_w\times c_{in}/g \times c_{out}/g)\times g=k_h\times k_w\times c_{in}\times c_{out}/g (kh×kw×cin/g×cout/g)×g=kh×kw×cin×cout/g
- FLOPs: k h × k w × c i n × c o u t × H × W / g k_h\times k_w\times c_{in}\times c_{out}\times H\times W/g kh×kw×cin×cout×H×W/g
- depth-wise conv
- params: k h × k w × c i n × c o u t / c i n = k h × k w × c o u t k_h\times k_w\times c_{in}\times c_{out}/c_{in}=k_h\times k_w\times c_{out} kh×kw×cin×cout/cin=kh×kw×cout
- FLOPs: k h × k w × c o u t × H × W k_h\times k_w\times c_{out}\times H\times W kh×kw×cout×H×W
2.SqueezeNet
轻量化网络中一个著名的网络是 SqueezeNet ,它发表于ICLR 2017,它拥有与 AlexNet 相同的精度,但只用了 AlexNet 1/50 的参数量。
SqueezeNet 的核心在于采用不同于常规的卷积方式来降低参数量,具体做法是使用 Fire Module,先用 1 × 1 1 \times 1 1×1 卷积降低通道数目,然后用 1 × 1 1 \times 1 1×1 卷积和 3 × 3 3 \times 3 3×3 卷积提升通道数。
2.1 压缩策略
SqueezeNet 采用如下3个策略:
- ① 将 3 × 3 3 \times 3 3×3 卷积替换为 1 × 1 1 \times 1 1×1 卷积
- ② 减少 3 × 3 3 \times 3 3×3 卷积的通道数
- ③ 将降采样操作延后,这样可以给卷积提供更大的 activation map,从而保留更多的信息,提供更高的分类准确率。
其中,策略1和2可以显著减少模型参数量,策略3可以在模型参数量受限的情况下提高模型的性能。
2.2 Fire Module
Fire Module是SqueezeNet网络的基础模块,设计如下图所示:
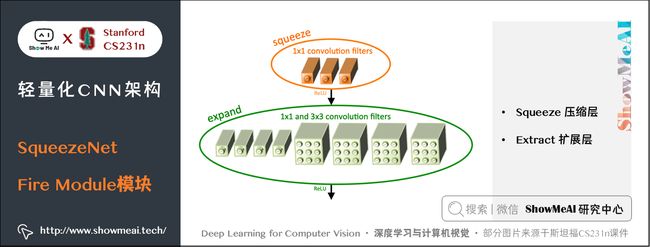
一个 Fire Module 由 Squeeze 和 Extract 两部分组成:
- Squeeze 部分包括了一系列连续的 1 × 1 1 \times 1 1×1 卷积
- Extract 部分包括了一系列连续的 1 × 1 1 \times 1 1×1 卷积和一系列连续的 3 × 3 3 \times 3 3×3 卷积,然后将 1 × 1 1 \times 1 1×1 和 3 × 3 3 \times 3 3×3 的卷积结果进行concat。
记 Squeeze 部分的通道数为 C s 1 × 1 C_{s{1\times 1}} Cs1×1,Extract部分 1 × 1 1 \times 1 1×1 和 3 × 3 3 \times 3 3×3 的通道数分别为 C e 1 × 1 C_{e{1\times 1}} Ce1×1 和 C e 3 × 3 C_{e{3\times 3}} Ce3×3,作者建议 C s 1 × 1 < C e 1 × 1 + C e 3 × 3 C_{s{1\times 1}} \lt C_{e{1\times 1}} + C_{e{3\times 3}} Cs1×1<Ce1×1+Ce3×3 ,这样做相当于在 Squeeze 和 Extraxt 之间插入了 bottlenet。
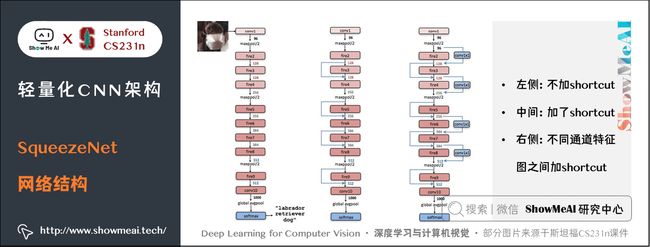
2.3 网络结构
在Fire Module的基础上搭建SqueezeNet神经网络。它以卷积层开始,后面是 8 个 Fire Module,最后以卷积层结束,每个 Fire Module 中的通道数目逐渐增加。另外网络在 conv1,fire4,fire8,conv10的后面使用了 max-pooling。
SqueezeNet 结构如下图所示,左侧是不加 shortcut 的版本,中间是加了 shortcut 的版本,右侧是在不同通道的特征图之间加入 shortcut 的版本。
SqueezeNet的性能类似于AlenNet,然而参数量只有后者的1/50,使用Deep Compression可以进一步将模型大小压缩到仅仅有0.5M。
2.4 SqueezeNet缺点
SqueezeNet 缺点如下:
- SqueezeNet 通过更深的网络置换更多的参数,虽然有更低的参数量,但是网络的测试阶段耗时会增加,考虑到轻量级模型倾向于应用在嵌入式场景,这一变化可能会带来新的问题。
- AlaxNet 的参数量(50M)大部分由全连接层带来,加上一部分参数量进行对比,数字稍有夸张。
3.Xception
另一个需要提到的典型网络是 Xception,它的基本思想是,在 Inception V3 的基础上,引入沿着通道维度的解耦合,基本不增加网络复杂度的前提下提高了模型的效果,使用Depthwise Seperable Convolution实现。
Xception虽然不是出于轻量级的考虑而设计的模型,但是由于使用了pointwise convolution和depthwise convolution的结合,实际上也起到了降低参数量的效果,我们也放在轻量模型里做个介绍。
3.1 设计动机
卷积在 HWC(高 × \times × 宽 × \times × 通道数)这3个维度上进行学习,既考虑空间相关性,又考虑通道相关性,可以考虑这两种相关性解耦分开。
Xception 的做法是使用 point-wise convolution 考虑 cross-channel correlation,使用 depthwise convolution 考虑 spatial correlation。
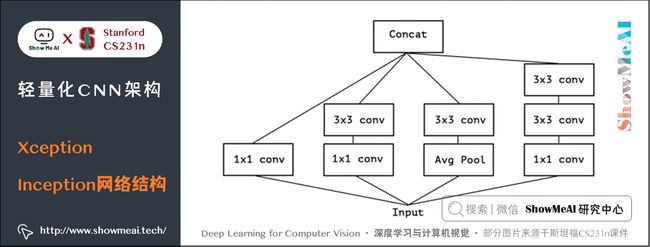
3.2 从Inception到Extreme version of Inception
下图是一个 Inception V3 的基础模块,分别用 1 × 1 1 \times 1 1×1 卷积和 3 × 3 3 \times 3 3×3 卷积考虑通道相关性和空间相关性,基本结构是用 1 × 1 1 \times 1 1×1 卷积降维,用 3 × 3 3 \times 3 3×3 卷积提取特征:
如果将上述结构简化,则可以得到如下的结构,可见每一个分支都包含了一个 1 × 1 1 \times 1 1×1 卷积和一个 3 × 3 3 \times 3 3×3 卷积:
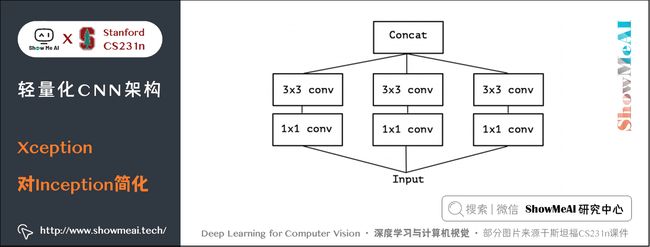
从上图中可见,对于每一个分支,该模块使用 1 × 1 1 \times 1 1×1 卷积对输入特征图进行处理,然后使用 3 × 3 3 \times 3 3×3 卷积提取特征。
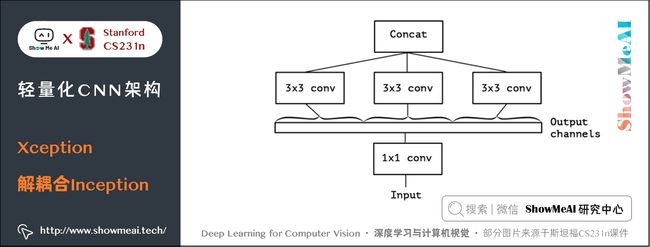
如果考虑空间相关性和通道相关性的解耦合,即用同一个 1 × 1 1 \times 1 1×1 卷积进行通道处理,将处理结果沿着通道维度拆解为若干部分,对于每一部分使用不同的 3 × 3 3 \times 3 3×3 卷积提取特征,则得到如下图所示的模块:
考虑一种更为极端的情况,在使用 1 × 1 1 \times 1 1×1 卷积之后,沿着通道维度进行最为极端的拆解,对于拆解后的每一个部分使用 3 × 3 3 \times 3 3×3 卷积提取特征,这一步可以使用 depthwise convolution 实现,最后将这些提取到的特征图进行 concat,这就是 Xception 的基础模块,如下图所示:
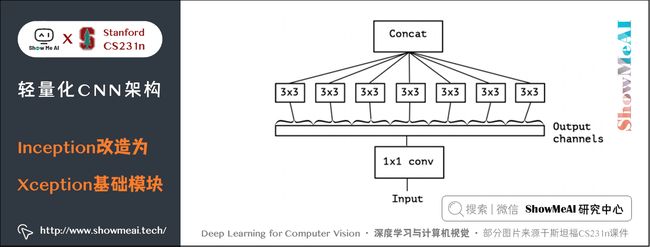
通过上图可以看到,该模块将输入数据在「通道维度」上解耦,我们称之为 extreme version of inception module。这点与 depthwise seperable convolution 很相似。
3.3 Extreme version of Inception与Depthwise Seperable Convolution
这一操作与 Depthwise Seperable Convolution 十分相似,后者包含 Depthwise Convolution 和 Pointwise Convolution 两部分。
上图所示的基础模块与 Depthwise Seperable Convolution 有如下两点不同:
- ① Depthwise Seperable Convolution先使用depthwise convolution,再使用 1 × 1 1 \times 1 1×1 卷积进行融合;上图所示的基础模块先使用 1 × 1 1 \times 1 1×1 卷积,再使用depthwise convolution。
- ② Depthwise Seperable Convolution 的 depthwise convolution 和 1 × 1 1 \times 1 1×1 卷积之间没有激活函数;上图所示的基础模块的这两个操作之间有激活函数。
在 Xception 中,作者直接使用了 Depthwise Seperable Convolution 作为基础模块。
3.4 Xception网络结构
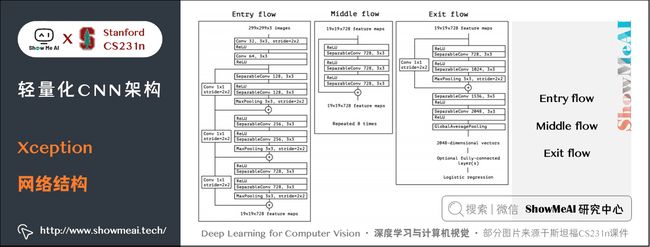
最后将这一基础模块叠加,并结合残差连接,就得到了Xception网络结构:
4.ShuffleNet
ShuffleNet 是由旷世科技提出的轻量化CNN网络,论文名称《ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices》,目标是改造网络架构使其能应用在移动设备上。
4.1 设计动机
ShuffleNet的动机在于大量的 1 × 1 1 \times 1 1×1 卷积会耗费很多计算资源,而 Group Conv 难以实现不同分组之间的信息交流;ShuffleNet 的解决方式是:使用 Group Conv 降低参数量;使用Channel Shuffle实现不同组之间的信息交流,进而对ResNet进行改进,可以看作ResNet的压缩版本。
4.2 Group Conv
我们再来看看Group Conv这个结构,它的基本思想是对输入层的不同特征图进行分组,再使用不同的卷积核对不同组的特征图进行卷积,通过分组降低卷积的计算量。
而Depthwise Convolution可以视作Group Conv的一种特殊情形。
假设输入通道为 C i C_i Ci,输出通道为 C o C_o Co,分组数目为 g g g,Group Conv的操作如下:
- 将输入特征图沿着通道分为 g g g 组,每一组的通道数目为 C i / g C_i/g Ci/g。
- 使用 g g g 个不同的卷积核,每一个卷积核的滤波器数量为 C o / g C_o/g Co/g。
- 使用这 g g g 个不同的卷积核,对 g g g 组特征图分别进行卷积,得到 g g g 组输出特征图,每一组的通道数为 C o / g C_o/g Co/g。
- 将这 g g g组的输出特征图结合,得到最终的 C o C_o Co 通道的输出特征图。
4.3 Channel Shuffle
Group Conv 的一个缺点在于不同组之间难以实现通信。一个可能的解决方式是使用 1 × 1 1 \times 1 1×1 卷积进行通信,但是这样会引入很大的计算量。
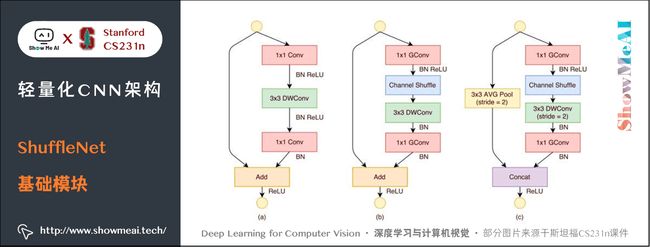
文中提出的思路是对 Group Conv 之后的特征图沿着通道维度进行重组,这样信息就可以在不同组之间流转,即 Channel Shuffle,如下图©所示。
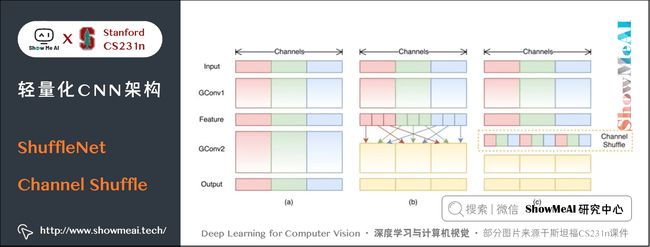
其实现过程如下:
- ① 输入特征图通道数目为 g × n g\times n g×n
- ② 将特征图的通道维度reshape为 ( g , n ) (g,n ) (g,n)
- ③ 转置为 ( n , g ) (n,g ) (n,g)
- ④ 平坦化成 g × n g \times n g×n 个通道
4.4 ShuffleNet基础模块
结合 Group Conv 和 Channel Shuffle,对ResNet的基础模块bottleneck(下图(a))进行改进,就得到了 ShuffleNet 的基础模块(下图(b)和©)
4.5 ShuffleNet缺点
- Channel Shuffle 操作较为耗时,导致 ShuffleNet 的实际运行速度没有那么理想。
- Channel Shuffle 的规则是人为制定的,更接近于人工设计特征。
5.ShuffleNet V2
在 ShuffleNet 之后又有改进的版本 ShuffleNet V2,改进了上述提到的 ShuffleNet 缺点,减少其耗时。
5.1 设计动机
ShuffleNet的轻量级网络设计,FLOPs 减少了很多,但实际的时间消耗并不短。原因是网络训练或者推理的过程中,FLOPs 仅仅是其耗时的一部分,其他操作(如内存读写、外部数据 IO 等)也会占用时间。
ShuffleNet V2 的作者分析了几种网络结构在 GPU/ARM 这两种平台上的计算性能指标,并提出了4条移动端卷积网络设计的准则,根据这些准则改进 ShuffleNet 得到了 ShuffleNet V2。
我们先来看看这4条移动端网络设计准则:
5.2 高效CNN设计的几个准则
使用的指标是内存访问时间(Memory Access Cost, MAC)。用理论和实验说明了以下几条准则。
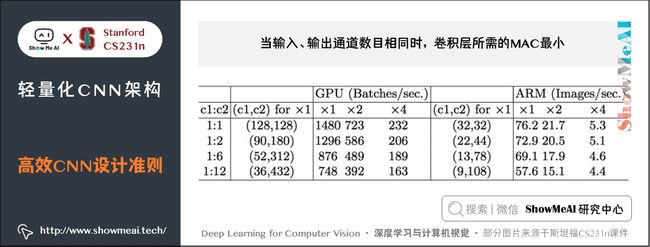
1) 输入输出通道数目相同时,卷积层所需的MAC最小。
理论推导:假设 1 × 1 1 \times 1 1×1 卷积的输入通道数目为 c 1 c_1 c1,输出通道数目为 c 2 c_2 c2,特征图大小为 h × w h\times w h×w,则这样一个 1 × 1 1 \times 1 1×1 卷积的 FLOPs 为:
B = h w c 1 c 2 B=hwc_1 c_2 B=hwc1c2
所需的存储空间如下,其中 h w c 1 hwc_1 hwc1 表示输入特征图所需空间, h w c 2 hwc_2 hwc2 表示输出特征图所需空间, c 1 c 2 c_1c_2 c1c2 表示卷积核所需空间:
M A C = h w ( c 1 + c 2 + c 1 c 2 ) MAC = hw(c_1 + c_2 + c_1 c_2) MAC=hw(c1+c2+c1c2)
根据均值不等式可得:
M A C ≥ 2 h w B + B h w MAC \ge 2 \sqrt {hwB} + \frac {B}{hw} MAC≥2hwB+hwB
等式成立的条件是 c 1 = c 2 c_1 = c_2 c1=c2,即在给定 FLOPs,输入特征通道数和输出特征通道数相等时,MAC 达到取值的下界。 实验证明: c 1 c_1 c1和 c 2 c_2 c2越接近、速度越快,如下表。
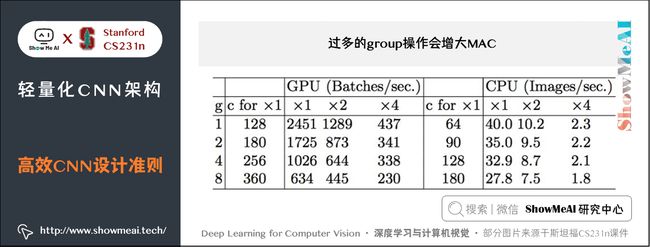
2) 过多的group操作会增大MAC
理论推导:带 group 的 1 × 1 1 \times 1 1×1 卷积的FLOPs如下,其中 g g g 表示分组数目:
B = h w c 1 c 2 g B = \frac{hwc_1c_2}{g} B=ghwc1c2
MAC 如下:
M A C = h w ( c 1 + c 2 + c 1 c 2 g ) MAC = hw(c_1 + c_2 + \frac {c_1c_2}{g} ) MAC=hw(c1+c2+gc1c2)
因此:
M A C = h w ( c 1 + c 2 + c 1 c 2 g = h w c 1 + B g c 1 + B h w \begin{aligned} MAC &= hw(c_1 + c_2 + \frac {c_1c_2}{g} \\ & =hwc_1 + \frac {Bg} {c_1} + \frac {B} {hw} \end{aligned} MAC=hw(c1+c2+gc1c2=hwc1+c1Bg+hwB
可见,在一定 FLOPs 的情况下,分组数目 g g g 越大,MAC 也越大。
实验证明:在FLOPs基本不变的操作下,group越大,速度越慢,如下图所示。
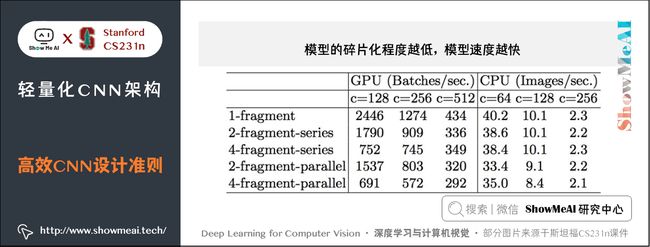
3) 模型的碎片化程度越低,模型速度越快
实验证明:fragment 表示碎片化程度的量化,serious 表示串行,即几个卷积层的叠加,parallel 表示并行,即类似于 Inception 的设计。可见在 FLOPs 不变的情况下,分支数量越多,网络的实际耗时越大。
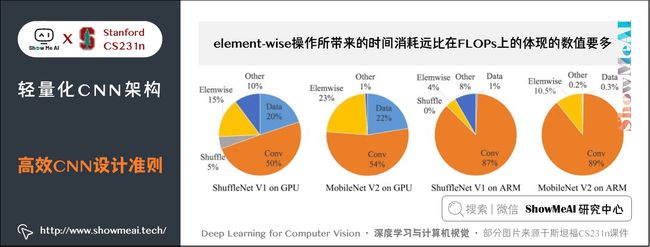
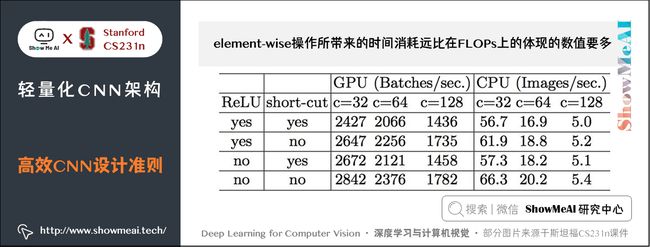
4) element-wise操作所带来的时间消耗远比在FLOPs上的体现的数值要多。
element-wise 操作虽然基本不增加 FLOPs,但是在 ShuffleNet V1 和 MobileNet V2 中,其耗时是十分可观的,如下图:
实验证明:基于 ResNet 的 bottleneck 进行了实验,short-cut 是一种 element-wise 操作。实验证明short-cut 操作会带来耗时的增加。
5.3 ShuffleNet V2基础模块
基于前面提到的4条准则,对 ShuffleNet 的基础模块(下图(a)(b))进行修改,得到 ShuffleNet V2 的基础模块(下图中©(d)):
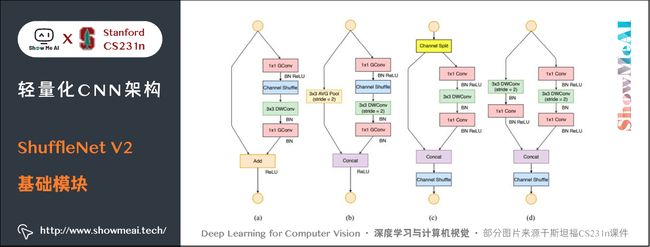
图中 © 和 (a) 相比,有如下不同之处:
- ① 模块的开始处增加了一个 Channel Split 操作,将输入特征图沿着通道分为 c ′ c' c′ 和 c − c ′ c-c' c−c′ 两部分,文中 c ′ = c / 2 c'=c/2 c′=c/2 ,对应于「准则1」。
- ② 取消了 1 × 1 1 \times 1 1×1 卷积中的 Group 操作,对应于「准则2」。
- ③ Channel Shuffle 移到了 Concat 后面,对应「准则3」。(因为 1 × 1 1 \times 1 1×1 卷积没有 Group 操作,没有必要在后面接 Channel Shuffle)
- ④ element-wise add 替换成 concat,对应「准则4」。
(b)、(d) 之间的区别也类似,另外(d) 的两个分支都进行了降采样,且最初没有 Channel Split 操作,因此 Concat 之后的通道数目翻倍。
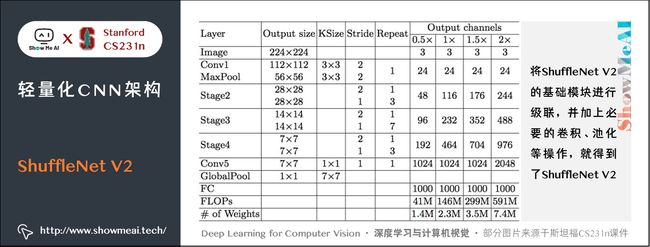
5.4 ShuffleNet V2整体结构
上述 ShuffleNet V2 基础模块级联,配合卷积、池化等衔接,就得到了如下图的 ShuffleNet V2 结构:
6.MobileNet
另外一个非常有名的轻量化移动端网络是 MobileNet,它是专用于移动和嵌入式视觉应用的卷积神经网络,是基于一个流线型的架构,使用深度可分离的卷积来构建轻量级的深层神经网络。 MobileNet 凭借其优秀的性能,广泛应用于各种场景中,包括物体检测、细粒度分类、人脸属性和大规模地理定位。
MobileNet有 V1 到 V3 不同的版本,也逐步做了一些优化和效果提升,下面我们来分别看看它的细节。
6.1 MobileNet核心思想
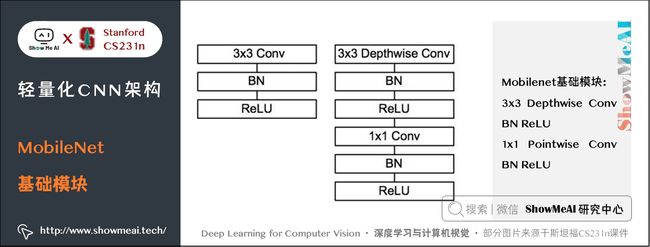
MobileNet V1 的核心是将卷积拆分成 Depthwise Conv 和 Pointwise Conv 两部分,我们来对比一下普通网络和MobileNet的基础模块
- 普通网络(以VGG为例) : 3 × 3 3 \times 3 3×3 Conv BN ReLU
- Mobilenet基础模块: 3 × 3 3 \times 3 3×3 Depthwise Conv BN ReLU 和 1 × 1 1\times1 1×1 Pointwise Conv BN ReLU
6.2 MobileNet缺点
- ① ReLU激活函数用在低维特征图上,会破坏特征。
- ② ReLU输出为0时导致特征退化。用残差连接可以缓解这一问题。
7.MobileNet V2
MobileNet V2 针对 MobileNet 的上述2个问题,引入了 Inverted Residual 和 Linear Bottleneck对其进行改造,网络为全卷积,使用 RELU6(最高输出为6)激活函数。下面我们展开介绍一下核心结构:
7.1 Inverted Residual
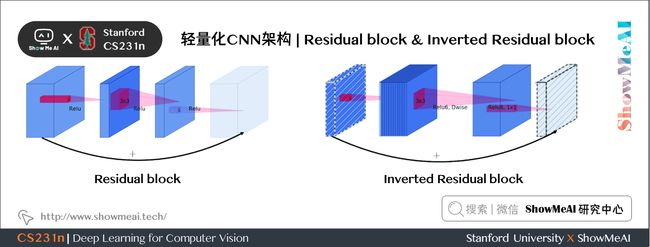
我们对比一下普通残差模块和Inverted Residual的差别
1) 普通残差模块
先使用 1 × 1 1 \times 1 1×1 卷积降低通道数量,然后使用 3 × 3 3 \times 3 3×3 卷积提取特征,之后使用 1 × 1 1 \times 1 1×1 卷积提升通道数量,最后加上残差连接。整个过程是「压缩-卷积-扩张」。
2) Inverted Residual
先使用 1 × 1 1 \times 1 1×1 卷积提升通道数量,然后使用 3 × 3 3 \times 3 3×3 卷积提取特征,之后使用 1 × 1 1 \times 1 1×1 卷积降低通道数量,最后加上残差连接。整个过程是「扩张-卷积-压缩」。
对比两个结构块如下图所示:
7.2 Linear Bottleneck
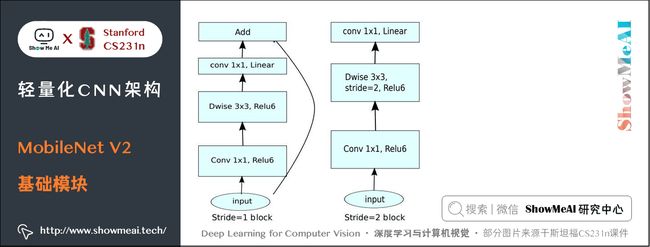
相比于 MobileNet 的基础模块,MobileNet V2 在 Depthwise Convolution 的前面加了一个 1 × 1 1 \times 1 1×1 卷积,使用 ReLU6 代替 ReLU,且去掉了第二个 1 × 1 1 \times 1 1×1 卷积的激活函数(即使用线性的激活函数),防止 ReLU 对特征的破坏。
7.3 MobileNet V2基础模块
使用上述的方法对 MobileNet 的基础模块进行改进,得到如下所示的 MobileNet V2 基础模块:
8.MobileNet V3
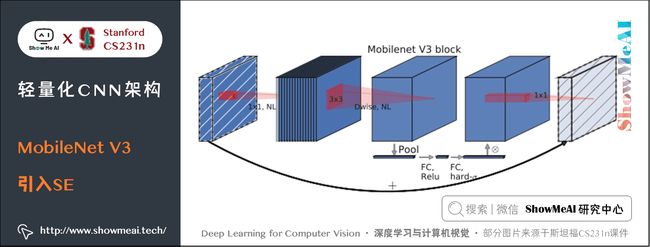
在 MobileNet V2 的基础上,又提出了MobileNet V3,它的优化之处包括:引入了 SE、尾部结构改进、通道数目调整、h-swish 激活函数应用,NAS 网络结构搜索等。我们来逐个看一下:
8.1 SE结构
MobileNet V3 在 bottleneck 中引入了 SE 结构,放在 Depthwise Convolution 之后,并且将 Expansion Layer 的通道数目变为原来的 1 / 4 1/4 1/4 ,在提升精度的同时基本不增加时间消耗。
8.2 尾部结构改进
MobileNet V3对尾部结构做了2处修改,从下图中「上方结构」修改为「下方结构」:
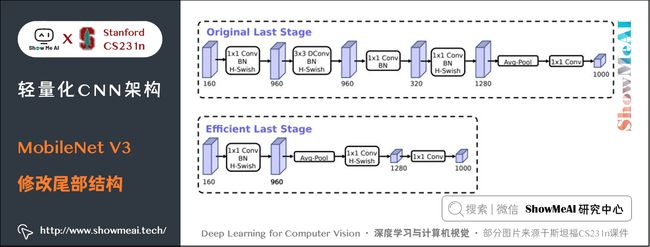
- 将 1 × 1 1 \times 1 1×1 卷积移动到 avg pooling 后面,降低计算量。
- 去掉了尾部结构中「扩张-卷积-压缩」中的 3 × 3 3 \times 3 3×3 卷积以及其后面的 1 × 1 1 \times 1 1×1 卷积,进一步减少计算量,精度没有损失。
8.3 通道数目调整
相比于 MobileNet V2,MobileNet V3 对头部卷积通道数目进行了进一步的降低。
8.4 h-swish激活函数
MobileNet V3 采用了 h − s w i s h \mathbf{h-swish} h−swish 激活函数,对应的 s w i s h \mathbf{swish} swish 和 h − s w i s h \mathbf{h-swish} h−swish 激活函数计算公式如下:
s w i s h [ x ] = x ⋅ σ ( x ) \mathbf{swish}[x] = x \cdot \sigma(x) swish[x]=x⋅σ(x)
h − s w i s h [ x ] = x R e L U 6 ( x + 3 ) 6 \mathbf{h-swish}[x] = x \frac {\mathbf{ReLU6}(x + 3)}{6} h−swish[x]=x6ReLU6(x+3)
8.5 NAS网络结构搜索
MobileNet V3 先用 NAS 搜索各个模块,得到大致的网络结构,相当于整体结构搜索;然后用NASAdapt得到每个卷积层的通道数目,相当于局部搜索。
9.参考资料
- 卷积神经网络的复杂度分析
- 纵览轻量化卷积神经网络:SqueezeNet、MobileNet、ShuffleNet、Xception
- 轻量级CNN网络之MobileNet V2
- ShuffleNet V2:轻量级CNN网络中的桂冠
- Roofline Model与深度学习模型的性能分析
10.要点总结
- 神经网络参数与复杂度计算
- 轻量化网络
- SqueezeNet
- Xception
- ShuffleNet V1~V2
- MobileNet V1~V3
ShowMeAI 斯坦福 CS231n 全套解读
- 深度学习与计算机视觉教程(1) | CV引言与基础 @CS231n
- 深度学习与计算机视觉教程(2) | 图像分类与机器学习基础 @CS231n
- 深度学习与计算机视觉教程(3) | 损失函数与最优化 @CS231n
- 深度学习与计算机视觉教程(4) | 神经网络与反向传播 @CS231n
- 深度学习与计算机视觉教程(5) | 卷积神经网络 @CS231n
- 深度学习与计算机视觉教程(6) | 神经网络训练技巧 (上) @CS231n
- 深度学习与计算机视觉教程(7) | 神经网络训练技巧 (下) @CS231n
- 深度学习与计算机视觉教程(8) | 常见深度学习框架介绍 @CS231n
- 深度学习与计算机视觉教程(9) | 典型CNN架构 (Alexnet, VGG, Googlenet, Restnet等) @CS231n
- 深度学习与计算机视觉教程(10) | 轻量化CNN架构 (SqueezeNet, ShuffleNet, MobileNet等) @CS231n
- 深度学习与计算机视觉教程(11) | 循环神经网络及视觉应用 @CS231n
- 深度学习与计算机视觉教程(12) | 目标检测 (两阶段, R-CNN系列) @CS231n
- 深度学习与计算机视觉教程(13) | 目标检测 (SSD, YOLO系列) @CS231n
- 深度学习与计算机视觉教程(14) | 图像分割 (FCN, SegNet, U-Net, PSPNet, DeepLab, RefineNet) @CS231n
- 深度学习与计算机视觉教程(15) | 视觉模型可视化与可解释性 @CS231n
- 深度学习与计算机视觉教程(16) | 生成模型 (PixelRNN, PixelCNN, VAE, GAN) @CS231n
- 深度学习与计算机视觉教程(17) | 深度强化学习 (马尔可夫决策过程, Q-Learning, DQN) @CS231n
- 深度学习与计算机视觉教程(18) | 深度强化学习 (梯度策略, Actor-Critic, DDPG, A3C) @CS231n
ShowMeAI 系列教程推荐
- 大厂技术实现:推荐与广告计算解决方案
- 大厂技术实现:计算机视觉解决方案
- 大厂技术实现:自然语言处理行业解决方案
- 图解Python编程:从入门到精通系列教程
- 图解数据分析:从入门到精通系列教程
- 图解AI数学基础:从入门到精通系列教程
- 图解大数据技术:从入门到精通系列教程
- 图解机器学习算法:从入门到精通系列教程
- 机器学习实战:手把手教你玩转机器学习系列
- 深度学习教程:吴恩达专项课程 · 全套笔记解读
- 自然语言处理教程:斯坦福CS224n课程 · 课程带学与全套笔记解读
- 深度学习与计算机视觉教程:斯坦福CS231n · 全套笔记解读
