- J-Link系列下载器的烧录问题彻底解决
1zero10
单片机单片机
1.确保成功安装好keil5方法:按照此链接中课程1.1准备安装环境进行操作【铁头山羊stm32入门教程【新版】-哔哩哔哩】https://b23.tv/wb5XUGo2.安装J-link驱动2-1从jlink官网下载最新版本驱动2-2按照此链接视频中jlink对应部分进行操作【STM32常用程序烧录方法,KeilIDE,ST-Link,Jlink-OB,DAPLink,串口(Uart)-哔哩哔哩
- Maven学习总结(15)——Maven 项目中pom.xml详解
一杯甜酒
Maven
<ver
- JavaScript——操作浏览器窗口
yiqi_perss
JavaScript
学习内容:今天学习了alert提示框,提示框中的内容,就是alert后边小括号中的内容例如:alert('我要学JavaScript!');alert('我要学习!');学习总结:日常小总结例如:后面的分号;可以随便去掉,不影响运行效果。不能去掉小括号,否则会报错,不信你可以试试。必须是英文引号,否则会报错。课外扩展:历史渊源例如:ECMAScript是一种语言标准,而JavaScript是网景公
- 基于STM32的智能图书馆管理系统
STM32发烧友
stm32嵌入式硬件单片机
1.引言传统图书馆管理存在借还效率低、书籍定位困难等问题。本文设计了一款基于STM32的智能图书馆管理系统,通过RFID技术、智能导航与自助服务终端,实现图书精准管理,提升读者服务体验。2.系统设计2.1硬件设计主控芯片:STM32F429ZI,集成LCD控制器与硬件JPEG解码感知模块:RFID读写器(MFRC522):识别图书标签红外传感器(E18-D80NK):检测书籍存取状态重量传感器(H
- STMicroelectronics 系列:STM32F1 系列_(8).STM32F1系列的USART接口及编程
kkchenkx
单片机开发stm32嵌入式硬件单片机
STM32F1系列的USART接口及编程1.USART接口概述USART(UniversalSynchronousAsynchronousReceiverTransmitter)是一种串行通信接口,可以支持异步和同步通信模式。在STM32F1系列单片机中,USART接口用于实现与外部设备的串行数据通信,例如与其他单片机、计算机、传感器等设备进行数据交换。USART接口可以配置为多种通信模式,包括U
- Stm32中SysTick 定时器的使用
weixin_58038206
stm32单片机嵌入式硬件
ysTick_Config(SystemCoreClock/100);这行代码通常出现在基于ARMCortex-M内核微控制器的程序中,用于配置SysTick定时器,下面结合代码进行详细解释:1.SysTick定时器SysTick定时器是ARMCortex-M内核中一个简单的24位递减定时器,也被称为系统滴答定时器。它常用于产生精确的时间延迟、实现周期性的任务调度等功能。2.SystemCoreC
- STM32操作FLASH
weixin_58038206
stm32嵌入式硬件单片机
以下将为你详细介绍STM32的Flash操作相关知识,包含基本原理、操作步骤,并给出具体的代码示例。1.STM32Flash基本原理1.1Flash存储器结构STM32的Flash存储器用于存储程序代码和一些需要掉电保存的数据。它通常被划分为多个扇区,每个扇区有固定的大小。不同系列的STM32芯片,其Flash扇区大小和数量可能不同。例如,STM32F103系列的Flash扇区大小有1KB、2KB
- STM32定时器输出PWM
墨菲墨菲
单片机stm32单片机嵌入式物联网
一、PWM1.定义英文全称:PULSEWIDTHMODULATION,脉冲宽度调制。脉冲:频率,方波宽度:占空比(duty),高电平的宽度2.用途(1)控制输出的电压和电流(2)灯光的亮度(3)电机二、编程细节PWM输出是没有中断触发的,PWM由硬件输出波形,用了中断反而会影响系统定时的效率。所以,记住以后使用定时器输出PWM都不需要使用到中断1.如配置STM32F407的TIM14的通道1,10
- Stm32定时器输出PWM
weixin_58038206
stm32单片机嵌入式硬件
下面为你提供使用STM32标准库实现定时器初始化、输出PWM以及添加定时器中断功能的详细代码及解释。此示例以STM32F103系列芯片为例,使用定时器3输出PWM信号并添加定时器更新中断。代码示例#include"stm32f10x.h"//函数声明voidRCC_Configuration(void);voidGPIO_Configuration(void);voidTIM3_Configura
- 开发一个音响控制板程序,需要从硬件架构设计、通信协议选择、核心功能实现三个层面进行系统化开发。以下是基于工业级开发流程的实施方案
星糖曙光
后端语言(nodejavascriptvue等等)stm32emacsAI编程设计规范课程设计
一、硬件架构设计阶段主控芯片选型推荐采用STM32F4系列(如STM32F407VGT6),其168MHz主频和硬件浮点单元可满足实时音频处理需求[7]外围电路需集成PT2313音频处理芯片,实现4通道输入选择、音量/音调调节功能[13]存储系统采用W25Q128闪存保存用户配置参数,预留SDIO接口支持扩展存储信号处理架构cc//典型信号链路配置voidAudioPath_Init(void){
- Vulkan
hanpfei
Android图形系统
Android7.0添加了对Vulkan的支持,一个高性能3D图形的低开销跨平台API。像OpenGLES一样,Vulkan提供了在应用中创建高质量,实时图形的工具。Vulkan的优势包括CPU开销降低及支持SPIR-VBinaryIntermediate语言。片上系统生产商(SoCs)比如GPU独立硬件供应商(IHVs)可以为Android编写Vulkan驱动;OEMs简单地需要为特定的硬件集成
- STM32F103C8T6 USB寄存器开发详解(3)-中断
云汐独渺
STM32USB开发单片机嵌入式硬件
对于USB模块,因为其通讯流程比较复杂,因此配置硬件中断就显得很重要了.STM32F103的中断寄存器位于另一个手册中,也就是下方蓝色标题的链接地址.NVIC寄存器用于启用中断,中断向量表中有两个USB相关中断,从机设备仅需要RX中断,也就是表项20.因此只需要配置NVIC_ISER0寄存器的位20即可开启USB模块中断,至于中断优先级分组等情况,可以直接使用默认配置,若有需要可以手动配置其余NV
- STM32启动文件.s解析
贾saisai
嵌入式STM32及操作系统stm32单片机
文章目录基本介绍实践详解栈空间开辟堆空间的开辟中断向量表定义复位程序对于_main函数的分析中断服务程序用户堆栈初始化系统启动流程基本介绍启动文件由汇编编写,是系统上电复位后第一个执行的程序。启动文件主要做了以下工作:1、初始化堆栈指针SP=_initial_sp2、初始化程序计数器指针PC=Reset_Handler3、设置堆和栈的大小4、初始化中断向量表5、配置外部SRAM作为数据存储器(可选
- STM32硬件SPI函数解析与示例
weixin_58038206
stm32嵌入式硬件单片机
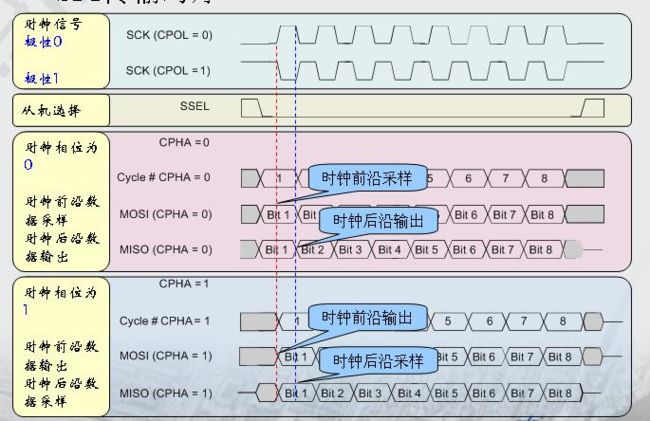
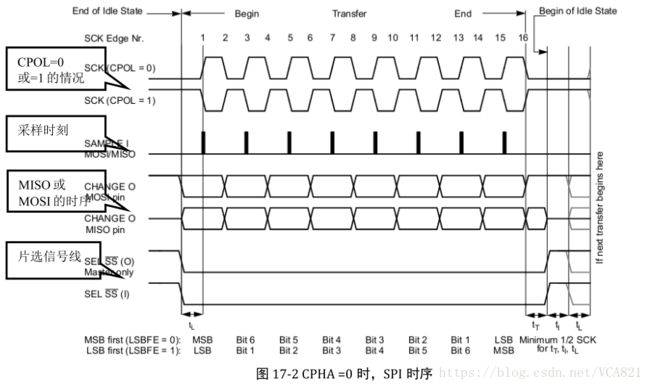
1.SPI简介SPI(SerialPeripheralInterface)即串行外设接口,是一种高速、全双工、同步的通信总线,常用于微控制器与各种外设(如传感器、存储器等)之间的通信。STM32系列微控制器提供了多个SPI接口,具有灵活的配置选项。2.相关函数解析2.1初始化相关函数SPI_Init(SPI_TypeDef*SPIx,SPI_InitTypeDef*SPI_InitStruct)功
- stm32正常运行流程图_stm32初始化流程图解析
imToken-Daisy
stm32正常运行流程图
STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARMCortex-M3内核。stm32参数:12V-36V供电兼容5V的I/O管脚优异的安全时钟模式带唤醒功能的低功耗模式内部RC振荡器内嵌复位电路工作温度范围:-40°C至+85°C或105°Cstm32特点:内核:ARM32位Cortex-M3CPU,最高工作频率72MHz,1.25DMIPS/MHz。单周期乘法和硬件除法
- win11 labelme 汉化菜单
不喝可乐_
python开发语言
替换app.py,再重启#labelme汉化菜单#-*-coding:utf-8-*-importfunctoolsimportosimportos.pathasospimportreimportwebbrowserimportimgvizfromqtpyimportQtCorefromqtpy.QtCoreimportQtfromqtpyimportQtGuifromqtpyimportQtWi
- 在单片机中是否应该取消32.768kHz外部晶振
鹿屿二向箔
单片机嵌入式硬件
在STM32F103C8T6中,32.768kHz外部晶振(LSE)并非必须,其必要性取决于具体应用需求。以下是详细分析:1.是否需要32.768kHz晶振?需要LSE晶振的场景实时时钟(RTC):若需RTC功能(如日历、精确计时),且要求高精度时间基准,必须使用32.768kHz晶振(LSE)。原因:内部低速RC振荡器(LSI,约40kHz)精度较低(±1%),可能导致时间累积误差(每天约1分钟
- 面向对象编程思想--SPI设备(Norflash、RFID、LCD屏幕)
Amber762
面向对象编程单片机嵌入式硬件stm32linux物联网mcuiot
上节写了对于IIC设备的面向对象写法面向对象编程思想--IIC设备(EEPROMANDMPU6050)-CSDN博客面向对象编程思想--IIC设备(EEPROMANDMPU6050)-CSDN博客NorFlash、RC522、LCD屏幕,这些都是常见的SPI设备,但各自有不同的操作需求。例如,NorFlash通常需要读写数据块,RC522是RFID读卡器,涉及特定的命令和数据处理,而LCD屏幕可能
- HTML5+CSS3【容器元素、 HTML5新增布局标签、视频和音频 、HTML5新增标签】(五)-全面详解(学习总结---从入门到深化)
童小纯
前端系列---从入门到深化css3html5
作者简介:大家好,我是小童,Java开发工程师,CSDN博客博主,Java领域新星创作者系列专栏:前端、Java、Java中间件大全、微信小程序、微信支付、若依框架、Spring全家桶如果文章知识点有错误的地方,请指正!和大家一起学习,一起进步如果感觉博主的文章还不错的话,请三连支持一下博主哦博主正在努力完成2023计划中:以梦为马,扬帆起航,2023追梦人目录容器元素(div)学习效果反馈HTM
- ACM寒假培训7--图与树
ZIZIZIZIZ()
算法图论数据结构笔记动态规划
学习总结最短路问题一.Floyd算法1.不可以直接到达的点设为正无穷2.自己到自己的距离设为03.d[k][i][j]为前k个点中i到j的最短路降维代码实现constintN=105;intd[N][N],n;voidfloyd(){for(intk=1;kusingnamespacestd;constintINF=numeric_limits::max();structEdge{intto;in
- Python在实际工作中的运用-拆分Excel表格
老胖闲聊
Pythonexcelpython
每次遇到表格按地区、按行数进行拆分都特别麻烦,每次都搞的头昏眼花,还容易出错,现在有了Python实在是各位“表哥”们的福音,下面我们就按行数和sheet两种场景来说明吧。首先需要安装openpyxl和pandaspipinstallopenpyxlpandas按行数拆分.pyimportopenpyxlimportosxlsfile="E:/表格目录/带拆分表格.xlsx"#加载现有的Excel
- hive全量迁移脚本
我要用代码向我喜欢的女孩表白
数据迁移bigdata-大数据专栏hivehadoop数据仓库
#!/bin/bash#场景:数据在同一库下,并且hive是内部表(前缀的hdfs地址是相同的)#1.读取一个文件,获取表名#echo"时间$dt_jian_2-------------------------">>/home/hadoop/qianyi_zengliang/rs.txt#跟客户宽带有关,万兆(1.2g),然后咨询业务后,看监控高峰,大概可以用一般600mb/spinjie="ha
- 以太网通信(1)UDP —— 数据发送
刻蓇铭鑫
FPGA的那些事udp网络协议网络
目录一、以太网通信简介1.OSI七层模型2.以太网数据包解析3.IP首部校验和计算与检验二、以太网通信实例1.整体实验框图2.发送部分时序图3.实验代码及仿真结果总结一、以太网通信简介前文我们讲述了多种通信协议(串口、IIC、SPI等协议),而以太网通信是相对比较高速的一种通信方式。目前,以太网是指遵守IEEE802.3标准组成的局域网,由IEEE802.3标准规定的主要是位于参考模型的物理层(P
- Python 爬虫功能介绍
chengxuyuan1213_
python爬虫网络爬虫
在当今互联网信息爆炸的时代,数据的获取与分析成为了各行各业不可或缺的一部分。Python,作为一种简洁、易读且功能强大的编程语言,凭借其丰富的库和框架,在数据抓取(即网络爬虫)领域展现了极大的优势。本文旨在介绍Python爬虫的基础功能,帮助初学者快速入门,理解爬虫的基本工作原理及常用技术。一、什么是网络爬虫网络爬虫(WebCrawler),又称网络蜘蛛(WebSpider)或网络机器人(WebR
- 智能停车收费-------如何用stm32G431结合LCD的uC8230型液晶控制器的驱动程序显示动态二维码
A星空123
项目实战stm32嵌入式硬件单片机
在寒假准备蓝桥杯的过程中,STM32G431顺便做个项目。。。。。。在STM32G431上使用uC8230液晶控制器显示动态二维码需要以下步骤,分为硬件连接、驱动开发、二维码生成和动态刷新四个主要部分:一、硬件连接STM32G431和uC8230之间需要正确的通信接口。通常,这类LCD控制器可能使用SPI或者8080并行接口。查一下uC8230的数据手册,确认接口类型和引脚配置。比如,如果使用SP
- STM32启动过程浅析(MAP文件、STM32启动过程、启动模式、Reset_Handler函数、__initial_sp堆栈的起始地址、堆栈)
孤芳剑影
STM32stm32嵌入式硬件单片机
参考http://t.csdnimg.cn/9Y6n4一、MAP文件浅析MAP文件(MemoryMapFile)是编译器生成的连接地图文件,提供了有关程序在内存中的布局信息。MAP文件包含了代码、数据、堆栈等在内存中的地址分配情况,以及每个模块的大小等信息。在MDK(KeilMicrocontrollerDevelopmentKit)编译过程中,MAP文件对于分析程序存储占用情况非常有用。以下是M
- 请解释设备像素、CSS 像素、设备独立像素、DPR、PPI 之间的区别 ?
程序员黄同学
前端开发Java面试题JavaScriptjavascript开发语言
一、核心概念解释1.设备像素(PhysicalPixel)定义:屏幕物理发光点的最小单位,硬件决定不可变。例如iPhone12的屏幕分辨率2532×1170表示横向2532个物理像素点。特点:不同设备物理像素密度不同,高密度屏幕(如Retina)单位面积像素更多。2.CSS像素(CSSPixel)定义:前端开发中使用的逻辑像素单位,如width:300px。浏览器根据DPR自动换算为物理像素。特点
- 亚远景-ASPICE 4.0与敏捷开发:如何实现高效协同
亚远景aspice
ASPICEASPICE4.0
ASPICE4.0与敏捷开发的结合是汽车软件开发领域的重要趋势。通过合理融合,可以实现高效协同,提升软件开发的质量和效率。以下是实现高效协同的关键要点:1.理解ASPICE4.0与敏捷开发的互补性ASPICE4.0强调软件开发过程的规范性、可追溯性和一致性,而敏捷开发注重快速响应变化、持续交付和团队协作。两者并非对立,而是可以相互补充。ASPICE4.0的严格性和可追溯性确保软件开发的稳定性和质量
- 亚远景-ASPICE与ISO 26262:汽车软件开发与功能安全的协同作用
亚远景aspice
汽车
ASPICE(汽车软件过程改进和能力确定)和ISO26262都是与汽车行业相关的标准,但它们关注的领域不同。下面简要介绍它们之间的关系:1.ASPICE:这是一个框架,用于改进和评估汽车软件开发和维护的过程。ASPICE覆盖了整个软件生命周期,包括需求收集、设计、实现、测试、维护等。它提供了度量标准,以评估和提高软件开发过程的质量。2.ISO26262:这是一个针对汽车行业的功能安全标准,它确保汽
- 亚远景-ASPICE 4.0-HWE半导体验证类型
亚远景aspice
ASPICE
1.Pre-SiliconVerification•功能验证FunctionalVerification:-使用仿真工具对设计进行功能验证,确保设计逻辑符合规格要求。-开发测试平台并编写测试用例,验证设计在各种输入条件下的行为。•形式验证FormalVerification:-通过数学方法验证设计的特性,确保设计在所有可能的输入条件下都能满足规范。-主要用于验证复杂的逻辑函数和状态机设计。•性能验
- 多线程编程之理财
周凡杨
java多线程生产者消费者理财
现实生活中,我们一边工作,一边消费,正常情况下会把多余的钱存起来,比如存到余额宝,还可以多挣点钱,现在就有这个情况:我每月可以发工资20000万元 (暂定每月的1号),每月消费5000(租房+生活费)元(暂定每月的1号),其中租金是大头占90%,交房租的方式可以选择(一月一交,两月一交、三月一交),理财:1万元存余额宝一天可以赚1元钱,
- [Zookeeper学习笔记之三]Zookeeper会话超时机制
bit1129
zookeeper
首先,会话超时是由Zookeeper服务端通知客户端会话已经超时,客户端不能自行决定会话已经超时,不过客户端可以通过调用Zookeeper.close()主动的发起会话结束请求,如下的代码输出内容
Created /zoo-739160015
CONNECTEDCONNECTED
.............CONNECTEDCONNECTED
CONNECTEDCLOSEDCLOSED
- SecureCRT快捷键
daizj
secureCRT快捷键
ctrl + a : 移动光标到行首ctrl + e :移动光标到行尾crtl + b: 光标前移1个字符crtl + f: 光标后移1个字符crtl + h : 删除光标之前的一个字符ctrl + d :删除光标之后的一个字符crtl + k :删除光标到行尾所有字符crtl + u : 删除光标至行首所有字符crtl + w: 删除光标至行首
- Java 子类与父类这间的转换
周凡杨
java 父类与子类的转换
最近同事调的一个服务报错,查看后是日期之间转换出的问题。代码里是把 java.sql.Date 类型的对象 强制转换为 java.sql.Timestamp 类型的对象。报java.lang.ClassCastException。
代码:
- 可视化swing界面编辑
朱辉辉33
eclipseswing
今天发现了一个WindowBuilder插件,功能好强大,啊哈哈,从此告别手动编辑swing界面代码,直接像VB那样编辑界面,代码会自动生成。
首先在Eclipse中点击help,选择Install New Software,然后在Work with中输入WindowBui
- web报表工具FineReport常用函数的用法总结(文本函数)
老A不折腾
finereportweb报表工具报表软件java报表
文本函数
CHAR
CHAR(number):根据指定数字返回对应的字符。CHAR函数可将计算机其他类型的数字代码转换为字符。
Number:用于指定字符的数字,介于1Number:用于指定字符的数字,介于165535之间(包括1和65535)。
示例:
CHAR(88)等于“X”。
CHAR(45)等于“-”。
CODE
CODE(text):计算文本串中第一个字
- mysql安装出错
林鹤霄
mysql安装
[root@localhost ~]# rpm -ivh MySQL-server-5.5.24-1.linux2.6.x86_64.rpm Preparing... #####################
- linux下编译libuv
aigo
libuv
下载最新版本的libuv源码,解压后执行:
./autogen.sh
这时会提醒找不到automake命令,通过一下命令执行安装(redhat系用yum,Debian系用apt-get):
# yum -y install automake
# yum -y install libtool
如果提示错误:make: *** No targe
- 中国行政区数据及三级联动菜单
alxw4616
近期做项目需要三级联动菜单,上网查了半天竟然没有发现一个能直接用的!
呵呵,都要自己填数据....我了个去这东西麻烦就麻烦的数据上.
哎,自己没办法动手写吧.
现将这些数据共享出了,以方便大家.嗯,代码也可以直接使用
文件说明
lib\area.sql -- 县及县以上行政区划分代码(截止2013年8月31日)来源:国家统计局 发布时间:2014-01-17 15:0
- 哈夫曼加密文件
百合不是茶
哈夫曼压缩哈夫曼加密二叉树
在上一篇介绍过哈夫曼编码的基础知识,下面就直接介绍使用哈夫曼编码怎么来做文件加密或者压缩与解压的软件,对于新手来是有点难度的,主要还是要理清楚步骤;
加密步骤:
1,统计文件中字节出现的次数,作为权值
2,创建节点和哈夫曼树
3,得到每个子节点01串
4,使用哈夫曼编码表示每个字节
- JDK1.5 Cyclicbarrier实例
bijian1013
javathreadjava多线程Cyclicbarrier
CyclicBarrier类
一个同步辅助类,它允许一组线程互相等待,直到到达某个公共屏障点 (common barrier point)。在涉及一组固定大小的线程的程序中,这些线程必须不时地互相等待,此时 CyclicBarrier 很有用。因为该 barrier 在释放等待线程后可以重用,所以称它为循环的 barrier。
CyclicBarrier支持一个可选的 Runnable 命令,
- 九项重要的职业规划
bijian1013
工作学习
一. 学习的步伐不停止 古人说,活到老,学到老。终身学习应该是您的座右铭。 世界在不断变化,每个人都在寻找各自的事业途径。 您只有保证了足够的技能储
- 【Java范型四】范型方法
bit1129
java
范型参数不仅仅可以用于类型的声明上,例如
package com.tom.lang.generics;
import java.util.List;
public class Generics<T> {
private T value;
public Generics(T value) {
this.value =
- 【Hadoop十三】HDFS Java API基本操作
bit1129
hadoop
package com.examples.hadoop;
import org.apache.hadoop.conf.Configuration;
import org.apache.hadoop.fs.FSDataInputStream;
import org.apache.hadoop.fs.FileStatus;
import org.apache.hadoo
- ua实现split字符串分隔
ronin47
lua split
LUA并不象其它许多"大而全"的语言那样,包括很多功能,比如网络通讯、图形界面等。但是LUA可以很容易地被扩展:由宿主语言(通常是C或 C++)提供这些功能,LUA可以使用它们,就像是本来就内置的功能一样。LUA只包括一个精简的核心和最基本的库。这使得LUA体积小、启动速度快,从 而适合嵌入在别的程序里。因此在lua中并没有其他语言那样多的系统函数。习惯了其他语言的字符串分割函
- java-从先序遍历和中序遍历重建二叉树
bylijinnan
java
public class BuildTreePreOrderInOrder {
/**
* Build Binary Tree from PreOrder and InOrder
* _______7______
/ \
__10__ ___2
/ \ /
4
- openfire开发指南《连接和登陆》
开窍的石头
openfire开发指南smack
第一步
官网下载smack.jar包
下载地址:http://www.igniterealtime.org/downloads/index.jsp#smack
第二步
把smack里边的jar导入你新建的java项目中
开始编写smack连接openfire代码
p
- [移动通讯]手机后盖应该按需要能够随时开启
comsci
移动
看到新的手机,很多由金属材质做的外壳,内存和闪存容量越来越大,CPU速度越来越快,对于这些改进,我们非常高兴,也非常欢迎
但是,对于手机的新设计,有几点我们也要注意
第一:手机的后盖应该能够被用户自行取下来,手机的电池的可更换性应该是必须保留的设计,
- 20款国外知名的php开源cms系统
cuiyadll
cms
内容管理系统,简称CMS,是一种简易的发布和管理新闻的程序。用户可以在后端管理系统中发布,编辑和删除文章,即使您不需要懂得HTML和其他脚本语言,这就是CMS的优点。
在这里我决定介绍20款目前国外市面上最流行的开源的PHP内容管理系统,以便没有PHP知识的读者也可以通过国外内容管理系统建立自己的网站。
1. Wordpress
WordPress的是一个功能强大且易于使用的内容管
- Java生成全局唯一标识符
darrenzhu
javauuiduniqueidentifierid
How to generate a globally unique identifier in Java
http://stackoverflow.com/questions/21536572/generate-unique-id-in-java-to-label-groups-of-related-entries-in-a-log
http://stackoverflow
- php安装模块检测是否已安装过, 使用的SQL语句
dcj3sjt126com
sql
SHOW [FULL] TABLES [FROM db_name] [LIKE 'pattern']
SHOW TABLES列举了给定数据库中的非TEMPORARY表。您也可以使用mysqlshow db_name命令得到此清单。
本命令也列举数据库中的其它视图。支持FULL修改符,这样SHOW FULL TABLES就可以显示第二个输出列。对于一个表,第二列的值为BASE T
- 5天学会一种 web 开发框架
dcj3sjt126com
Web框架framework
web framework层出不穷,特别是ruby/python,各有10+个,php/java也是一大堆 根据我自己的经验写了一个to do list,按照这个清单,一条一条的学习,事半功倍,很快就能掌握 一共25条,即便很磨蹭,2小时也能搞定一条,25*2=50。只需要50小时就能掌握任意一种web框架
各类web框架大同小异:现代web开发框架的6大元素,把握主线,就不会迷路
建议把本文
- Gson使用三(Map集合的处理,一对多处理)
eksliang
jsongsonGson mapGson 集合处理
转载请出自出处:http://eksliang.iteye.com/blog/2175532 一、概述
Map保存的是键值对的形式,Json的格式也是键值对的,所以正常情况下,map跟json之间的转换应当是理所当然的事情。 二、Map参考实例
package com.ickes.json;
import java.lang.refl
- cordova实现“再点击一次退出”效果
gundumw100
android
基本的写法如下:
document.addEventListener("deviceready", onDeviceReady, false);
function onDeviceReady() {
//navigator.splashscreen.hide();
document.addEventListener("b
- openldap configuration leaning note
iwindyforest
configuration
hostname // to display the computer name
hostname <changed name> // to change
go to: /etc/sysconfig/network, add/modify HOSTNAME=NEWNAME to change permenately
dont forget to change /etc/hosts
- Nullability and Objective-C
啸笑天
Objective-C
https://developer.apple.com/swift/blog/?id=25
http://www.cocoachina.com/ios/20150601/11989.html
http://blog.csdn.net/zhangao0086/article/details/44409913
http://blog.sunnyxx
- jsp中实现参数隐藏的两种方法
macroli
JavaScriptjsp
在一个JSP页面有一个链接,//确定是一个链接?点击弹出一个页面,需要传给这个页面一些参数。//正常的方法是设置弹出页面的src="***.do?p1=aaa&p2=bbb&p3=ccc"//确定目标URL是Action来处理?但是这样会在页面上看到传过来的参数,可能会不安全。要求实现src="***.do",参数通过其他方法传!//////
- Bootstrap A标签关闭modal并打开新的链接解决方案
qiaolevip
每天进步一点点学习永无止境bootstrap纵观千象
Bootstrap里面的js modal控件使用起来很方便,关闭也很简单。只需添加标签 data-dismiss="modal" 即可。
可是偏偏有时候需要a标签既要关闭modal,有要打开新的链接,尝试多种方法未果。只好使用原始js来控制。
<a href="#/group-buy" class="btn bt
- 二维数组在Java和C中的区别
流淚的芥末
javac二维数组数组
Java代码:
public class test03 {
public static void main(String[] args) {
int[][] a = {{1},{2,3},{4,5,6}};
System.out.println(a[0][1]);
}
}
运行结果:
Exception in thread "mai
- systemctl命令用法
wmlJava
linuxsystemctl
对比表,以 apache / httpd 为例 任务 旧指令 新指令 使某服务自动启动 chkconfig --level 3 httpd on systemctl enable httpd.service 使某服务不自动启动 chkconfig --level 3 httpd off systemctl disable httpd.service 检查服务状态 service h